
基于模糊PID控制的微位移平台监控系统设计
2013-09-12 06:15:04王建红陈耀忠陆宝春张建华黄家才
机械设计与制造工程 2013年11期
王建红,陈耀忠,陆宝春,张建华,黄家才
(1.南京工程学院自动化学院,江苏南京 211167)
(2.北方信息控制集团有限公司,江苏南京 211153)
(3.南京理工大学机械学院,江苏南京 210094)
基于模糊PID控制的微位移平台监控系统设计
王建红1,陈耀忠2,陆宝春3,张建华1,黄家才1
(1.南京工程学院自动化学院,江苏南京 211167)
(2.北方信息控制集团有限公司,江苏南京 211153)
(3.南京理工大学机械学院,江苏南京 210094)
针对微细电化学加工的加工状况,利用压电陶瓷作为微位移器件,将高性能嵌入式微处理器、大规模可编程逻辑器件以及模糊PID算法应用于微位移平台监控系统的开发,设计并实现了微细加工控制领域的模糊PID微位移平台监控系统。实验结果表明,微位移平台监控系统采用模糊PID控制算法,系统稳态误差明显减小。
电化学加工;微位移平台;监控系统;模糊PID控制
微细电化学加工利用电化学反应去除材料,最终得到所需要的复杂形状[1]。加工过程中,材料以离子方式去除[2],无需在工件或零件表面施加切削力,无材料熔除与变形,具有其他微细加工方法无可比拟的优势,在微细精密成型、化学合成、纳米结构的形成等领域得到广泛应用[3]。
由于微细电化学加工零件尺寸较小,对机床的进给精度要求较高,一般要求小于1μm,随之而来的问题是,由于材料去除在极小空间内进行,同时受到加工微位移结构——压电致动器的非线性、迟滞的影响以及加工间隙内流场与电场分布的复杂性等制约[4-5],加工间隙的数学建模十分困难,因此微位移平台实际位置的测量与控制成为微细电化学加工的一大难题。
本文在微细电化学加工过程中检测到微位移平台的实际位置,基于高性能嵌入式系统设计基于模糊PID的控制器,形成一个控制间隙大小的闭环控制系统,通过调整阴极进给速度或加工电压来调节微位移平台的运动位置,使之稳定地保持在小间隙状态,从而实现了对整个加工过程的良好控制。
1 系统的总体结构
精密微位移机构是一种能够实现微米、亚微米及纳米尺度运动的执行器,其行程小、灵敏度高。压电陶瓷微位移器件具有位移分辨率高、出力大、响应快、功耗小、无噪声、不发热等优点,是目前最具有前途的微位移执行器件[6]。
本系统中的大位移通过交流伺服电机带动滚珠丝杠实现,简称宏平台;微米量级的小位移及间隙调整通过压电陶瓷实现,简称微平台;极间电压的脉宽监测通过可编程器件实现,极间电压幅值通过高速A/D检测;电流幅值通过加工回路中串联精密电阻、测量电阻两端电压间接得到。加工中滚珠丝杠的速度、位移控制由可编程逻辑器件完成。宏微两级平台的配合遵循以下原则:进给过程中,位移超过50μm,压电陶瓷位移器回复初始状态,滚珠丝杠移动。
2 微位移平台监控系统硬件设计
本文设计的微位移平台监控系统,微位移机构有三路,每路可控,能完成三轴控制要求。位移精度可达到纳米级,达到超微细加工的要求。
监控系统结构如图1所示。电源模块给整个控制系统供电,处理器选择32位高速处理器S3C2410A,负责所有控制算法的实现,控制模块由FPGA构成,负责对AD、DA及键盘读取进行管理,测量模块对各路的模拟量进行采集,并经AD转换送入处理器,处理计算的结果经DA转换为模拟量,再经驱动模块控制压电陶瓷微位移机构,人机交互模块负责系统参数的输入、显示及与上位机的串口通信。

图1 微位移平台监控系统结构
2.1 电源模块
监控系统内部芯片较多,芯片的工作电压等级有1.2V、1.8V、3.3V、5V、±15V 等。基于系统的电压等级和功耗的考虑,选择常州市创联电源有限公司生产的B-25P型开关电源,该开关电源的AC输入是(220±15%)V,输出有两路:一路输出为5V,最大输出电流3A;另一路输出为12V,最大输出电流 1A。其中 5V通过 LM1117-3.3、LM1117-1.8、LM1117-1.2等电源转换芯片转变为3.3V、1.8V、1.2V供给系统使用,12V通过DC-DC电源模块DFA5-12S15转变为±15V电压。
2.2 处理器模块
处理器模块是整个系统的核心,负责复杂控制算法的实现,所以要选择一款高性能处理器。本文选用了三星公司基于ARM920T内核的32位RISC高速处理器S3C2410A,该处理器功能丰富,运行速度快,最高工作频率可达到203MHz,工作电压为双电压:3.3V/2.5V。
2.3 驱动模块
压电陶瓷材料在外电场的作用下,其内部正负电荷中心的位置发生移动,导致材料出现机械变形,从而产生位移,称为逆压电效应。利用逆压电效应输出高精度的控制电压,可驱动微位移。本文执行机构选用低压驱动叠层机械封装式压电陶瓷致动器(PZT),处理器经DA转换后的模拟电压范围为0~10V,必须经驱动模块放大至PZT的工作电压(0~150V)。为保证控制精度,对PZT的控制选用明天科技有限公司的产品——压电陶瓷精密控制器。PZT及其控制器共同构成系统的控制对象。
2.4 测量模块
驱动模块内部含有传感器,可以测量位移、电压等,构成闭环控制。测量模块包括DA、AD,可检测0~10V的反馈电压。由于处理器S3C2410核心板的外引脚数目有限,所以在设计中用FPGA来控制AD、DA。DA器件精度越高,则控制的位移精度也越高,本次设计选用了12位的 DA器件MX7541,位移控制精度达到15nm。因为AD和DA出现在一个控制环里,所以二者转换精度必须一致。虽然处理器S3C2410A自带AD,但是它的转换精度只有10位,达不到设计要求,因此另外选用了美国ADI公司的高速12位逐次比较型AD器件AD574A。
2.5 控制模块
控制模块选用了Lattice公司的FPGA芯片Lattice XP2-5,负责管理 AD、DA及键盘,主要任务包括AD、DA的地址译码、输入缓冲、输出锁存、AD转换、按键盘扫描逻辑完成键盘驱动等,如图2所示。FPGA内部需要提供6个缓冲区,因为读缓冲区和写缓冲区地址可以共用,所以只需要3个地址就可以了。
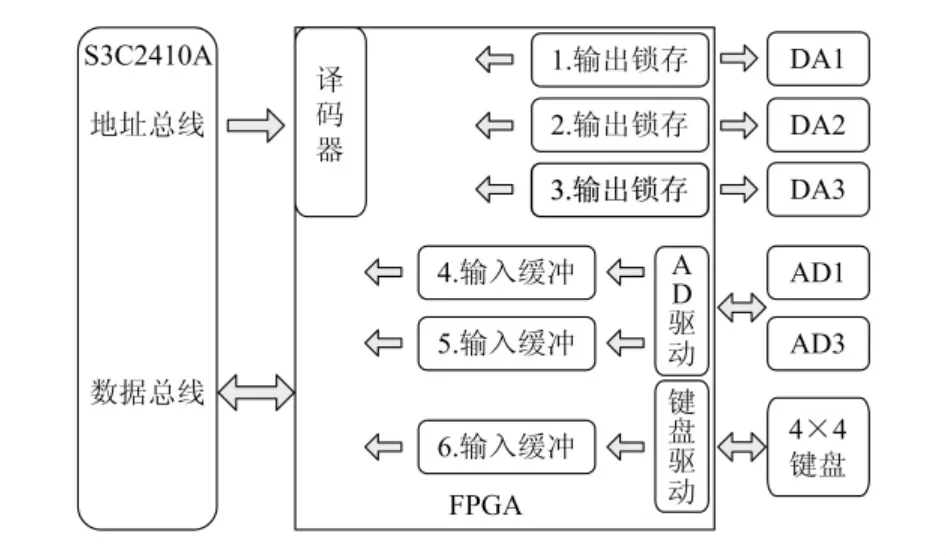
图2 FPGA控制模块图
2.6 人机交互模块
人机交互模块主要负责系统参数的输入、显示及串口通信,包括液晶显示、4×4矩阵键盘输入、串口通信设计。液晶采用华天正科技有限公司的TFT液晶模块,可用图表的形式显示处理后的数据,4×4矩阵键盘的驱动在FPGA内实现,主要完成系统参数的设定和控制界面的切换,而串口通信采用CP1202芯片,将监控系统串行数据转换成USB数据格式,以便实现监控系统和上位机之间的通信。
3 微位移平台监控系统软件设计
微位移平台监控系统不仅要实现平台实际位移的实时监控,而且要实时显示控制电压的跟随情况。工作台中的位移传感器将实际的位移经A/D转换后送到处理器中,处理器对信号进行模糊PID算法的调整,随后经D/A转换去控制压电陶瓷的微位移机构,最终加载至工作台,以达到快速、准确跟随加工间隙的目的。本文采用结构化设计思想,软件总体结构如图3所示。
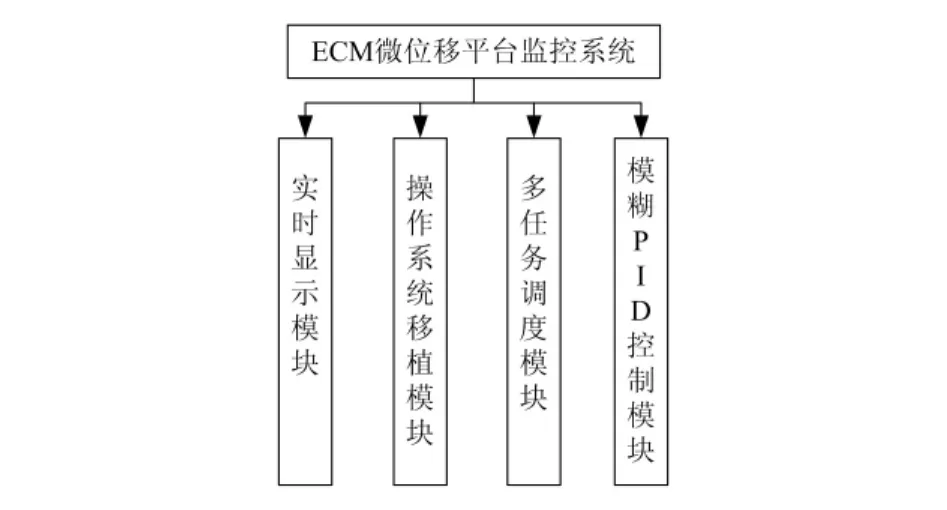
图3 软件总体结构
3.1 实时显示模块
实时显示模块主要完成对控制电压的实时监控,从而显示位移变化情况,不仅显示X,Y,Z三轴控制电压,而且显示其反馈值。在操作系统中,创建了三个任务来处理三轴的显示,每经过一个采样周期,屏幕的数值刷新一次,由于采样周期短,所以显示是连续的。
3.2 操作系统移植模块
本文软件采用μC/OS操作系统,而微位移平台监控系统的硬件核心是S3C2410A处理器,所以必须将μC/OS操作系统移植到处理器S3C2410A平台上,移植的过程包括整个系统的搭建以及对S3C2410A的底层配置,具体流程为:设置代码存储加载位置→编写系统启动代码→设置中断处理任务→修改与调度相关代码→完成系统的移植。
3.3 多任务调度模块
多任务调度模块主要完成各个任务间的调度、配合、中断处理等。由于采用多任务的方式运行,因此首先必须确定各任务的优先级,然后进行任务的时间分配,完成任务间的时序配合。
3.4 模糊PID控制模块
模糊PID控制模块是整个系统的核心,关系到间隙的控制效果。系统将给定电压值和反馈值进行比较后,计算误差e与误差变化率ec,确定隶属度,对清晰量进行模糊化,然后进行模糊推理,对PID参数进行在线修改,再进行模糊量清晰化输出,以控制压电陶瓷的微位移机构。其结构如图4所示。
PID参数模糊整定过程:首先找出Kp,Ki及Kd与e,ec之间的关系,制定模糊控制规则表。接着在系统运行中,不断地监测e和ec,根据模糊控制规则表对Kp,Ki,Kd进行在线修改,减小e和ec,从而使被控对象具有良好的静态、动态性能。

图4 模糊PID控制器结构
目前常采用的模糊控制算法有CRI推理查表法、Mamdani直接推理法、后件函数法等。本文采用CRI推理查表法,将所有输入量都量化为模糊语言变量值,并对输入的模糊语言变量值进行组合,求出输入的模糊语言变量值和输出的模糊语言变量值之间的关系,从而制定出模糊控制规则表。
4 实验测试
本设计选择了ADS1.2作为控制器固件程序的编译环境,H-JTAG作为调试代理。调试过程为:首先连接好各个部件,将ADS和H-JTAG设置关联,然后将编写好的VHDL程序下载到FPGA内,C语言控制程序下载到FLASH程序存储器内,最后将C语言程序加载到ADS中进行编译和测试。
当系统输入控制电压为1V时,模糊控制算法应用前后的系统输出电压波形分别如图5和图6所示。
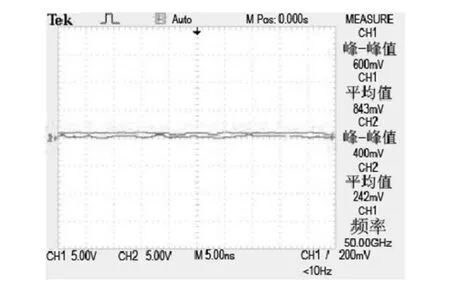
图5 反馈波形(未加模糊控制算法)
比较图5和图6可知,未加算法时,反馈控制电压信号的平均值为843mV,误差为15.7%;加上算法以后,平均值为995mV,误差为0.5%。稳态误差有明显改善。
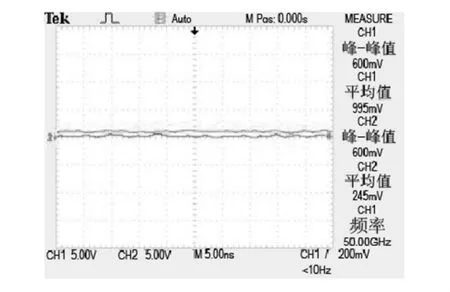
图6 反馈波形(加模糊控制算法)
5 结束语
本文利用压电陶瓷作为微位移器件,基于通用嵌入式处理器S3C2410和大规模可编程器件FPGA的辅助控制,设计了微细电化学微位移平台监控系统,实现了μC/OS操作系统在S3C2410上的移植,并采用模糊PID控制加工位置,有效减小了系统的稳态误差,微位移控制精度可以达到15nm。
[1]朱荻.微米与纳米级加工技术[J].航空制造技术,2002(6):22-25.
[2]朱荻.国外电解加工的研究进展[J].电加工与模具,2000(1):11-16.
[3]陈伦军,李刚,赵万生.微细特种加工的最新研究进展[J].电加工与模具,2006(3):24-28.
[4]Kozak J,Rajurkar K P,Makkar Y.Selected problems of micro electrochemical machining[J].Journal of Material Processing Technology,2004,149(3):208 -213.
[5]Yung-Tien Liu,Rong-Fong Fung,Tai-Kun Huang.Dynamic responses of a precision positioning table impacted by a softmounted piezoelectric acturator[J].Precision Engineering,2004(28):250-252.
[6]魏强,张玉林.压电陶瓷微位移工作台的建模方法[J].光学精密工程,2007,10(15):1596-1601.
Design of Micro-displacement Platform Monitoring System Based on Fuzzy PID Control
WANG Jianhong1,CHEN Yaozhong2,LU Baochun3,ZHANG Jianhua1,HUANG Jiacai1
(1.Nanjing Institute of Technology,Jiangsu Nanjing,211167,China)
(2.North Industries Group Corporation,Jiangsu Nanjing,211153,China)
(3.Nanjing University of Science and Technology,Jiangsu Nanjing,210094,China)
In the process of micro electrochemical machining,it applies piezoelectric ceramic as micro - displacement device,embeds the high-performance into microprocessor,designs the large-scale programmable logic device as well as the fuzzy PID algorithm to develop the micro-displacement platform monitoring system in the micro-fabrication control field.Experimental results show that the fuzzy PID control algorithm can significantly reduce the steady-state error of the micro-displacement platform monitoring system.
Electrochemical Machining;Micro-displacement Platform;Monitoring System;Fuzzy PID Control
TP273.4
A
2095-509X(2013)11-0072-04
10.3969/j.issn.2095-509X.2013.11.018
2013-08-26
国家自然科学基金资助项目(61104085);江苏省高校自然科学基础研究项目(11KJB510005)
王建红(1977—),女,江苏如东人,南京工程学院讲师,主要研究方向为微细加工技术。
猜你喜欢
压电与声光(2019年1期)2019-02-22 09:46:06
铜仁学院学报(2018年6期)2018-07-05 09:47:40
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:54
电源技术(2015年11期)2015-08-22 08:50:38
电子工业专用设备(2015年4期)2015-05-26 09:10:31
中国舰船研究(2015年2期)2015-02-10 06:45:50
航天返回与遥感(2014年4期)2014-07-31 17:47:42
