
基于形状特征的视觉导航AGV路径标识符识别技术研究
2013-09-12 06:15:00周涛涛徐娅萍
机械设计与制造工程 2013年11期
周涛涛,徐娅萍,吴 恒
(西北工业大学机电学院,陕西西安 710072)
基于形状特征的视觉导航AGV路径标识符识别技术研究
周涛涛,徐娅萍,吴 恒
(西北工业大学机电学院,陕西西安 710072)
为提高视觉导航AGV在运行过程中对路径标识符识别的可靠性和实时性,首先设计了实际应用中常见的几类标识符,然后针对这些标识符提出了一种基于形状特征的识别算法,最后通过实验验证了该算法的可行性,并对实验结果进行了分析,分析表明当标识符存在污损、旋转、比例缩放以及光照条件变化等情况时,该算法仍然能够获得快速高精度的识别效果。
视觉导航;路径标识符识别;形状特征;Canny算子;梯度方向直方图
作为自动化物流运输系统、柔性制造系统的关键设备,自动导航小车(Automated Guided Vehicle,AGV)有多种引导方式,其中基于路径识别跟踪的视觉导航AGV因其具有路径设置灵活、导航原理简单、环境适应性强等优点,得到飞速发展和广泛应用。视觉导航AGV在实际应用中存在多种工况,如加速、减速、停车及不同工位判断等,各种路径标识符设置的灵活性,识别的准确性、实时性,也成为视觉导航AGV优越于其他导航方式的标志之一。
传统的路径标识符识别算法主要有基于线扫描的标识符识别和基于灰度特征的标识符识别[1]。文献[2]根据不同标识符水平所截线段宽度的变化规律,通过抽行扫描标识符前、中、后三段区域来识别各标识符。该算法仅在标识符完整、粘贴规范的情况下可以取得较好的识别效果,当标识符存在污损、旋转的情况时,识别可靠性迅速下降[2]。文献[3]设计并研究了0~9这10个数字标识符的识别,主要采用图像的灰度均值为主要特征量,实现对数字特征的提取和识别[3]。该算法对标识符的设计要求较高,同样不满足在标识符存在污损、旋转等情况时应有的可靠识别,并且基于灰度特征的识别算法计算量较大[4],对识别的实时性不利。
为提高标识符识别的鲁棒性和实时性,本文设计并研究了一种基于形状特征的标识符识别技术。采用形状特征中的边缘轮廓来建立梯度直方图(HOG),然后采用欧氏距离来衡量实时图像目标与模板库中各模板图像的相似性,从而进行匹配,完成识别过程。算法采用一系列不依赖于像素栅格的边缘曲线,获得标识符的几何形状,然后在搜索图像中寻找相似的形状,不受特定灰度值的限制,并且由于图像的特征点较像素点要少很多,大大减少了匹配过程的计算量,并且在标识符存在污损、旋转、比例缩放以及光照条件变化等情况时仍然能够获得快速高精度的识别效果。
1 路径标识符的设计
AGV在实际运行中存在多种工况,如靠近停车站点两侧时要求运行速度减慢,以实现平稳停车和缓慢起动。远离停车站点后要求加快速度,以提升运输效率。在停车站点处需要进行工位判断,以决定是否停车等。
针对以上几种情况,并结合工厂、物流中心等多以数字表示不同工位的实际情况,设计了如图1所示的几类路径标识符。图中:正方形代表加速标识符,其中辅以加号进行说明;圆形代表减速标识符,其中辅以减号进行说明;三角形代表停车站点,其中数字0~9代表该站点的工位号。使用简单的正方形、圆、三角形可以迅速地查找标识符边缘轮廓,数字工位号0~9外边加上三角形停车符,可以使每一个工位数字满足在旋转情况下的唯一标识,例如6号位和9号位,无三角形停车符时,在标识符存在旋转的情况时不能准确进行识别。

图1 路径标识符设计图
2 路径标识符的识别
本文研究的标识符的识别算法主要基于目标识别匹配技术,其核心思想是图像匹配,即根据参考图像与实时图像来选定某些特征和相似性度量准则,并进行相关分析计算,确定最佳匹配特征。
2.1 特征的选择与提取
形状作为图像最显著的视觉特征之一,不随周围亮度等环境的变化而变化,相对于颜色、纹理等特征,更为直观稳定。因此,基于AGV路径标识符在形状上的显著特征,选用标识符边缘形状作为识别的特征[5]。
传统的边缘检测算子主要有Roberts梯度算子、Sobel算子、Prewitt算子、Krisch 算子、Laplacian算子等。相比以上算子,Canny边缘检测算子是一个具有滤波、增强、检测的多阶段优化算子,具有良好的信噪比和检测精度。
Canny边缘检测主要步骤有:首先用高斯滤波器平滑图像,消除噪声;接着用一阶偏导的有限差分来计算梯度的幅值和方向;然后对梯度幅值进行非极大值抑制;最后用双阈值算法检测和连接边缘。
2.2 相似性度量准则
经Canny算子检测出的目标图像边缘梯度包含了目标形状的方向信息,从中可以提取出目标的结构特征,对目标边缘各像素的梯度方向建立统计图(即梯度方向直方图),该统计图可以表征目标的形状。梯度方向直方图(Histogram of Oriented Gradient,HOG)是一种目标检测、图像匹配中常用的特征描述子,可以从统计意义上表征物体边缘的分布特性[6]。
对目标图像边缘像素点构造梯度方向直方图H(n)= [h(1),h(2),…,h(k)],将该直方图横坐标360°量化为k级,即1≤n≤k,纵坐标表示边缘点梯度方向落在第n级中的点数。由此可见,梯度方向直方图对图像的几何平移、光学形变等情况可以保持良好的不变性[6]。当目标图像存在缩放变化情况时,需要构造归一化的梯度方向直方图,这样可使其具有缩放不变性,构造公式如下:
其中nPixel为所有边缘点的个数。
采用归一化的梯度方向直方图表示目标物体的形状,可以使图像具有几何平移、光学形变、尺度缩放的不变性。本文采用欧氏距离来计算参考图像和实时图像二者梯度方向直方图的距离,并以此衡量两者之间的相似性,值越小,则相似性越高。欧氏距离计算公式如下:

其中:h1n表示实时图像中目标物体的梯度方向直方图;h2n表示参考图像中目标物体的梯度方向直方图。
此外,当目标图像存在旋转时,梯度方向直方图对应作周期循环移位,当相似性度量欧氏距离不满足旋转不变性时,可以通过直方图的移位来计算相关性,使该度量准则满足旋转不变性。修改欧氏距离计算公式如下:

其中:h1l
n表示实时图像中目标物体的梯度方向直方图循环左移l个单位后得到的直方图;h2n表示参考图像中目标物体的梯度方向直方图。
2.3 路径标识符识别流程
第一步:建立匹配模板库。分别采集加速标识符、减速标识符和0~9号停车站点标识符,用Canny边缘检测算子提取边缘,建立归一化梯度方向直方图(其中横坐标0°~360°等分72份,即k取72,纵坐标为归一化之后的比例值),以此组成匹配模板库。
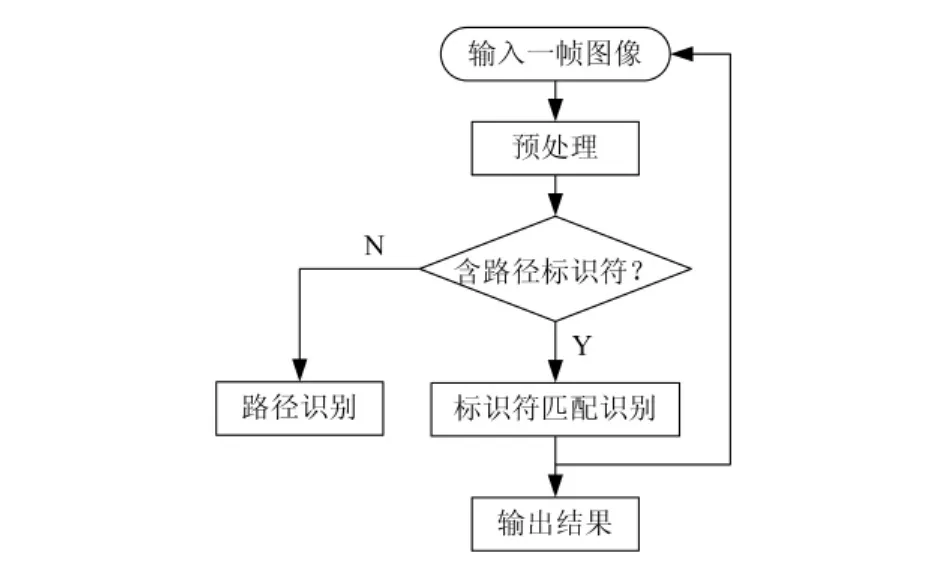
图2 路径标识符识别流程图
第二步:实时采集路径图像进行识别,如图2所示。首先对输入的一帧图像进行预处理,以消除噪声,提高图像质量。接着同样用Canny边缘检测算子提取边缘,如果边缘图像中包含目标物体即路径标识符,则分别计算平移后的各标识符梯度直方图与模板库中各梯度直方图的欧氏距离,取最小值作为匹配分值,相应的模板图像即为匹配图像。
3 实验结果与分析
为验证本文算法的准确性和可靠性,分别在AGV导航路径一侧粘贴加速标识符、减速标识符和停车站点标识符,并采集包含有标识符的路径图像进行处理分析。下面以6号停车站点标识符的识别进行验证,如图3(a)~(f)所示。
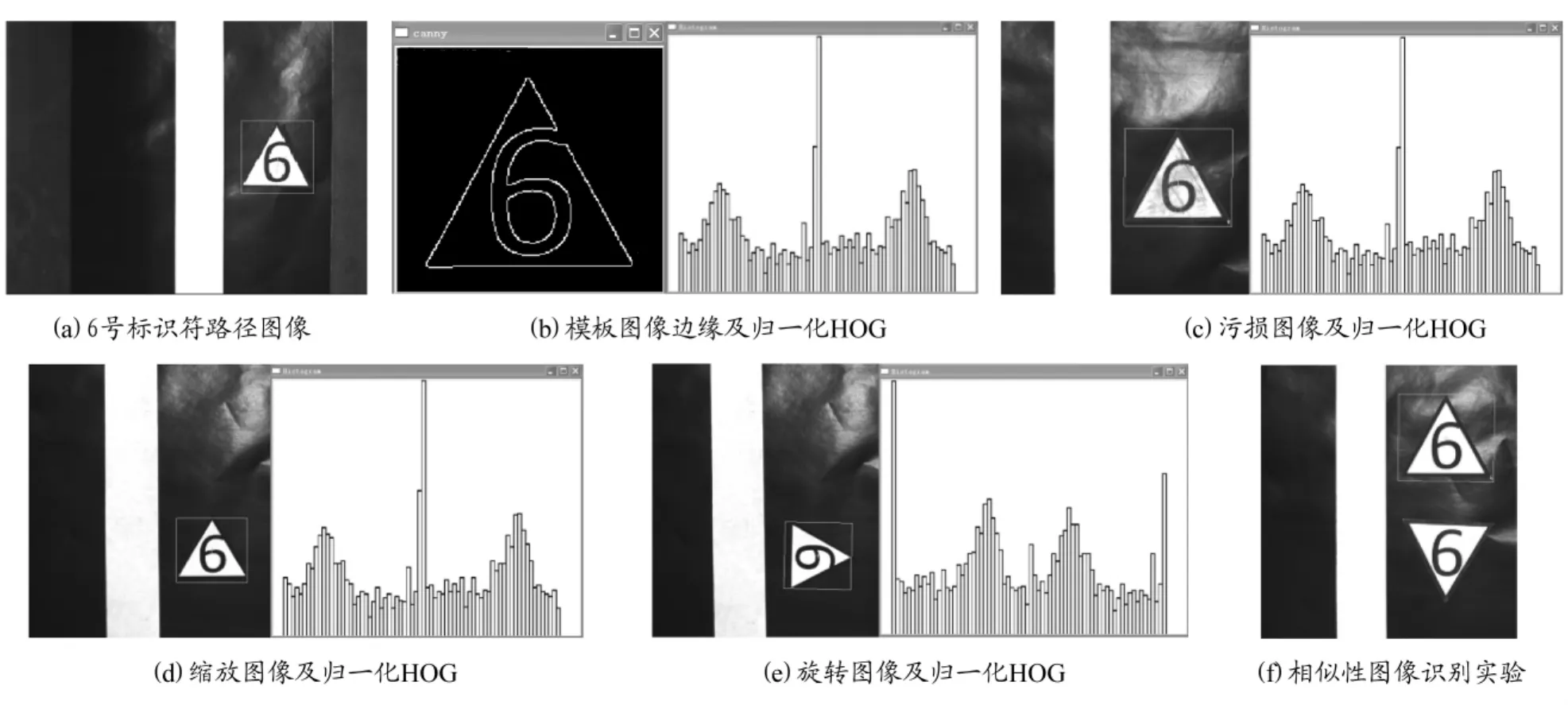
图3 6号停车站点标识符匹配实例
在上述实验中,图3(a)为拍摄的粘贴有6号停车站点标识符的路径图像,并从中选择感兴趣区域,进行训练。图3(b)对模板图像使用Canny边缘检测算子提取边缘并且生成归一化梯度直方图。图3(c)、(d)、(e)分别为图像存在污损、缩放、旋转情况时,各自生成的归一化梯度直方图。图3(f)为6号停车站点标识符和9号停车站点标识符同时存在的情况下,对6号停车站点标识符的识别匹配情况。
图3(c)、(d)、(e)的准确识别说明该算法满足几何平移、光学形变、尺度缩放以及旋转的不变性,表明算法适应性强。图3(f)的准确匹配说明设计的标识符具有唯一性。以上实验充分说明该算法满足鲁棒性要求。同时,由于标识符图像的简单,算法计算量不大,实验中平均匹配时间在10ms左右,并且在实验室现有AGV上验证,运行良好说明了该算法满足实时性要求。
4 结束语
基于路径识别跟踪的视觉导航的AGV作为目前智能车领域的热门研究课题,其路径标识符的设计与识别对AGV运行的可靠性、智能化水平等有着重要的影响。本文提出的基于形状特征的视觉导航AGV路径标识符识别算法,不同于传统的基于灰度特征或者线扫描特征的识别算法,它不受特定灰度值的限制,并且减少了匹配过程的计算量。另外当标识符存在污损、旋转、比例缩放以及光照条件变化等情况时仍然能够获得快速高精度的识别效果。该算法为AGV导航标识符的识别提供了有效可靠的理论依据和实验验证。
[1]齐正罡.基于统计特征的AGV特殊标识符识别方法研究[D]. 长春:吉林大学,2005.
[2]周能涛.基于机器视觉的自动导引车关键技术研究[D].合肥:安徽农业大学,2008.
[3]范莹莉.基于机器视觉的AGV导航标识符识别方法研究[J].伺服控制,2011(2):57-59.
[4]赵振民,彭国华,符立梅.基于形状模板的快速高精度可靠图像匹配[J].计算机应用,2010,30(2):441-444.
[5]朱铮涛,张宏.基于特征点的形状匹配技术及其算法实现[J]. 计算机工程与设计,2010,31(5):1096-1099.
[6]陈泽滨,黄晓华.基于形状边缘方向直方图的图像检索算法研究[J].计算机与现代化,2009(8):144-146.
Research on the Recognition of Path Identifiers Based on Shape Features of Vision-Based AGV
ZHOU Taotao,XU Yaping,WU Heng
(Northwestern Polytechical University,Shaanxi Xi'an,710072,China)
In order to obtain better robustness and real- time during the recognition of path identifiers at the vision -based automatic guided vehicle(AGV)runs,it designs several kinds of common identifiers in practical application.And then aiming at these identifiers,it proposes a method of identifiers recognition based on shape features,shows the detail about extractting the image edges with Canny operator,construction the histogram of oriented gradient.It uses Euclidean distance as similarity measurement to match the model image and test image.Experimental results demonstrate that the method has fast speed and high accuracy when the identifiers are dirty,rotated,scale-changed or the illumination changes.
Vision Navigation;Recognition of Path Identifiers;Shape Features;Canny Operator;Histogram of Oriented Gradient
TP242.2
B
2095-509X(2013)11-0059-04
10.3969/j.issn.2095-509X.2013.11.015
2013-07-10
周涛涛(1988—),男,河南灵宝人,西北工业大学硕士研究生,主要研究方向为工业机器人控制系统、图像处理与机器视觉等。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
中国设备工程(2023年16期)2023-08-29 07:10:58
计算机应用(2022年8期)2022-08-24 06:30:36
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
铁道建筑(2021年11期)2021-03-14 10:01:48
计算机系统应用(2020年8期)2020-03-22 07:41:52
科技风(2019年13期)2019-06-11 15:48:29
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
现代电子技术(2018年12期)2018-06-12 06:41:20
中国美术馆(2016年6期)2017-01-19 08:44:24
