
北斗导航系统上行注入链路窄带干扰抑制分析*
2013-09-12 01:50郭淑霞刘孟江董中要
微处理机 2013年4期
郭淑霞,刘孟江,董中要,高 颖
(西北工业大学,西安 710065)
1 引言
卫星导航系统发展至今,已经具备了全球性、可靠性、高精度、连续性等优势,其应用包括定位导航、授时校频、精密测量等,在事关国计民生的重要行业中,发挥着不可替代的作用。目前世界上有四大卫星导航系统,分别是美国的 GPS、俄罗斯的GLONASS、欧洲的GALILEO和中国的北斗导航系统。我国的北斗卫星导航系统第一期工程(5GEO+4MEO+3IGSO)已于2012年实现了亚太地区覆盖,并计划于2020年实现全球覆盖。
电子、通信等信息技术的巨大进步使得北斗卫星导航系统面临的电磁环境也变得越来越复杂,各种电磁设备工作时带来的电子干扰势必会对北斗卫星导航系统的正常运行造成极大威胁。总的来说,北斗卫星导航系统上行注入链路面临的干扰分为两类:一是来自复杂的自然空间电磁环境;二是来自复杂的人为电磁环境,包括有意干扰和无意干扰。二者共同构成了北斗卫星导航系统面临的复杂电磁环境。其中又以人为的有意干扰影响最为严重。人为有意干扰根据干扰类型通常有窄带干扰(Narrow band interference)和宽带干扰(Broad band interference)等[1]。各种干扰信号分布于整个时域、频域和空域,这将会给北斗上行注入链路通信带来极大危害,严重时会导致整个卫星导航系统无法正常进行定位、授时等工作。因此为了保证北斗卫星导航系统的正常运行,有必要进行干扰及干扰抑制技术的研究。
针对北斗卫星导航系统上行注入链路存在的窄带干扰进行了研究。北斗上行链路采用的信号体制为QPSK直接序列扩频技术。扩展频谱(Spread spectrum)技术本身具有信号频谱宽、波形复杂、安全隐蔽等特点,在一定程度上降低了被截获和干扰的概率,具有一定的抗干扰能力,已经成为卫星导航系统中最基本的抗干扰技术。但是仅仅依靠扩频技术还不足以抵抗复杂电磁环境下的各种干扰,因此有必要在上行注入链路中加入其它的干扰抑制技术,以保障北斗卫星导航系统的正常运行。目前关于北斗导航系统窄带干扰的研究只是针对于下行链路的用户接收机进行的,而没有针对上行注入链路进行研究。在分析北斗上行注入链路信道状况的基础上,针对窄带干扰采用了时域处理和变换域处理两种抑制算法[2],并进行了MATLAB仿真,对两种抑制算法进行了基于误码率和信噪比的性能比较。
2 上行注入链路信道分析
上行注入链路信号在地面到卫星之间的传播,主要受到大气效应的影响。大气效应对上行注入信号包络ra和相位φa的影响都符合正态分布[3],即
其中,ma、2分别是相位的均值和方差。
北斗卫星导航系统星端接收机的接收信号可以表示为视距分量(LOS component)和多径分量(Multi-path component)之和。

其中,r为接收信号的幅度,θ为信号的相位;z为LOS分量幅度,Φz为LOS分量相位;s为多径分量幅度,Φs为多径分量相位。
对于北斗上行注入链路所处信道,可以认为LOS分量没有被遮挡,zexp(jΦz)为复常数,其幅度z和相位Φs只与地面注入站和星端接收机之间距离有关,此时信号的包络服从莱斯分布,LOS分量与多径分量功率的比值可通过A2/2b0计算得到。

3 窄带干扰分析
窄带干扰是指功率谱集中在某一中心频率(通常对准干扰对象的工作频率)附近的一个很小的频带内,同时频带远远小于其中心频率的信号,即频带较窄。所以,在相同的干扰功率下,窄带干扰功率谱密度比较高,对干扰覆盖带宽内北斗导航系统的上行注入链路信号影响也比较大,尤其是窄带干扰信号的频率与上行注入信号的频率相同或者接近时,对上行注入链路信号的影响非常大,会导致误码率的急剧增高。图1给出了多个瞄准频率的窄带干扰频谱图。
窄带干扰中常见的音频干扰可用下式表示[4]:

其中Ai为干扰幅度,fi为相对于扩频信号载波的频谱,θi为干扰相位,在[0,2π]上均匀分布,相互独立。
可得窄带干扰自相关函数为:

功率谱密度为:

其平均功率为:

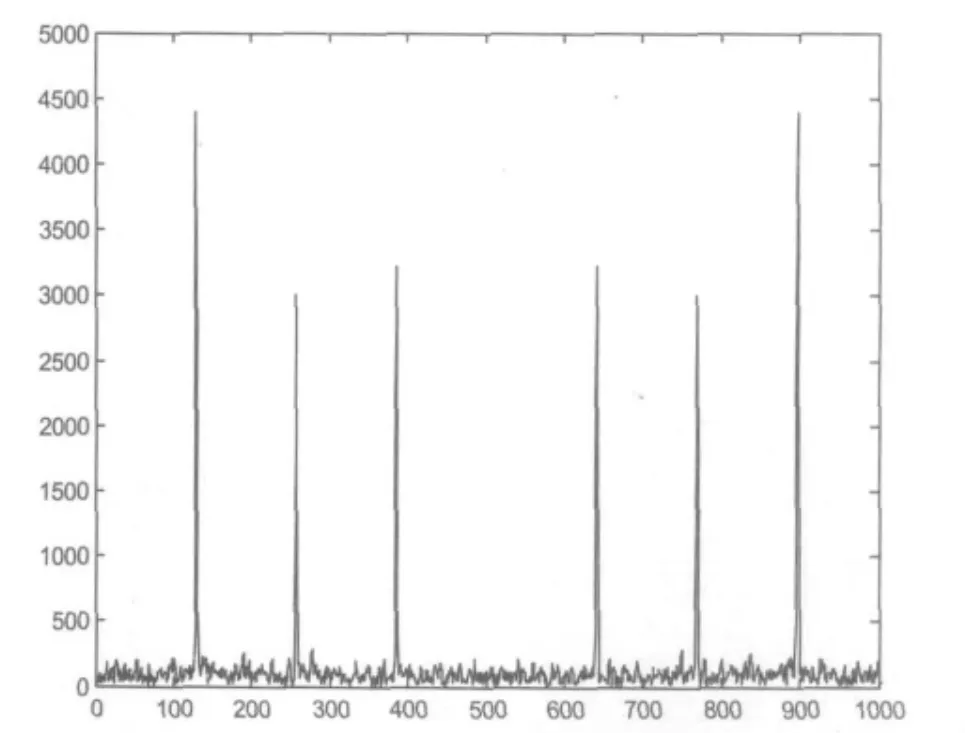
图1 多个瞄准频率的窄带干扰频域图
4 干扰抑制算法
北斗上行链路扩频信号体制的抗干扰技术主要可分为自适应滤波的时域处理技术(Adaptive filtering time domain processing)和变换域处理技术(Transform domain processing)两类[5]。下面主要针对这两种常用的干扰抑制技术进行研究和比较。
4.1 时域自适应滤波
由于在北斗上行注入链路扩频信号体制中窄带干扰的频率和幅度的随机性,因此在星端接收机中难以实时地估计窄带干扰的幅频特性,然后再对窄带干扰进行有效抑制,因而需要采用自适应技术。自适应滤波技术是通过特定的自适应算法不断调整滤波器的抽头系数,在时域或者频域自动跟踪窄带干扰的频幅特性,然后去除接收信号中的窄带干扰成分,实现对干扰的抑制。
自适应滤波的时域处理技术[6]主要利用北斗卫星导航系统上行注入信号为宽带信号,可预测性差,而窄带干扰信号具有较好的可预测性的特点,先得到一个干扰信号的估计副本,然后在星端接收机的接收信号中减去估计副本,从而对窄带干扰信号进行抑制,基本实现结构为估计-相减。用于窄带干扰估计的滤波器可通过延迟线抽头来实现,干扰估计滤波器根据实现结构的不同可以分为线性预测滤波器(Linear predictive filter)和线性插值滤波器(Linear interpolation filter)两种。线性插值滤波器是在线性预测滤波器基础上的改进和演化,可以实现更高精度的估计。这是因为它对窄带干扰的估计不仅利用过去时刻的输入值,还同时利用将来时刻的输入值。
当上行注入信号的功率和窄带干扰相比拟时,由于上行注入信号的存在,会严重影响对窄带干扰的估计。这里研究的是在强窄带干扰情况下的上行注入信号传输,上行注入信号功率要远远小于窄带干扰功率,上行注入信号的存在对窄带干扰估计的影响较小,因此采用LMS自适应算法可以对窄带干扰进行有效的抑制,LMS自适应滤波的原理如下图2所示。
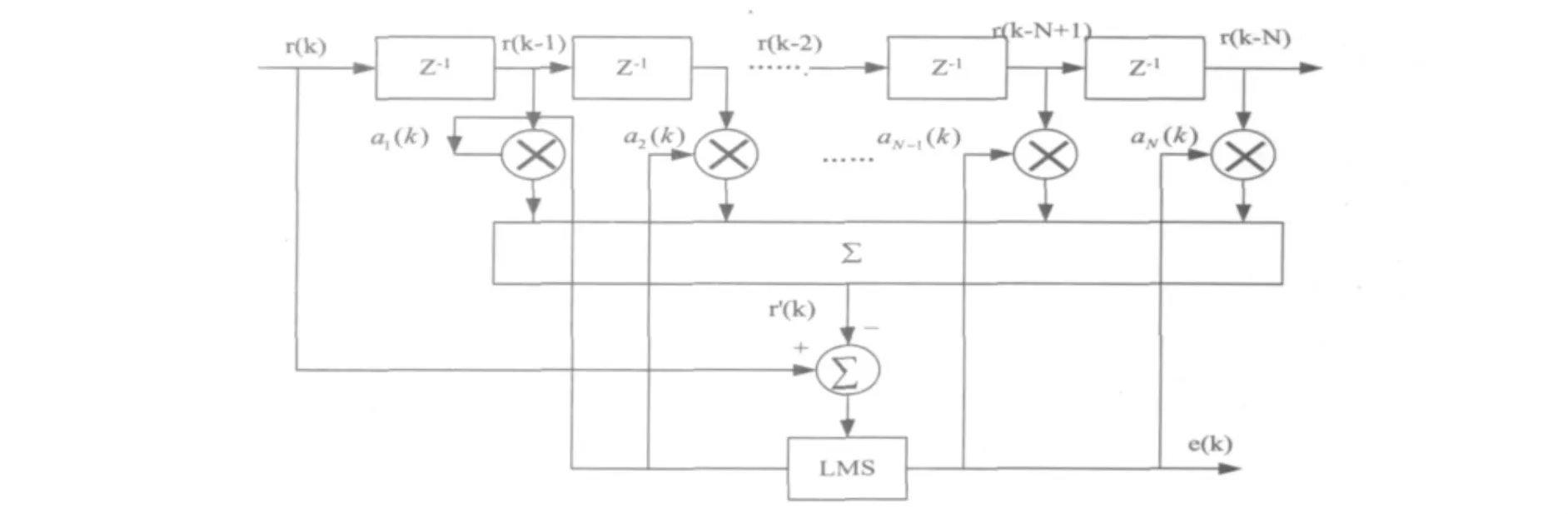
图2 自适应滤波原理图
4.2 变换域处理技术
与时域干扰抑制处理方法相比,变换域干扰抑制技术[7]可以进行快速的自适应调整并可以同时抑制多个干扰。并且对于北斗卫星导航系统上行注入链路来说,干扰环境复杂多变,且干扰的统计特性也难以准确预测,因而适合采用变换域干扰抑制技术。干扰抑制原理如图3所示。变换域处理技术主要利用上行链路注入信号、窄带干扰不同的频域特征来去除窄带干扰信号,上行注入信号和白噪声的频谱相对比较平坦,而窄带干扰信号的频谱往往表现为很高很窄的冲激,从而可以在变换域识别存在的窄带干扰的频谱,并可以通过相应的处理(比如同过设定相应的门限)来去除窄带干扰。变换域的干扰抑制根据域变换方法的不同,有离散傅里叶变换(Discrete Fourier transform,DFFT)、离散余弦变换(Discrete cosine transform,DCT)、小 波 包 变 换(Wavelet packet transform,WPT)等多种方法,在文中采用基于离散傅里叶变换的干扰抑制技术。

图3 变换域干扰抑制算法原理框图
图3中干扰处理与干扰检测是变换域窄带干扰 抑制的基础。干扰处理主要是在对有用信号影响极小情况下,实现对窄带干扰信号的抑制,通常采用陷波器(Notch)实现。这里陷波器采用无限冲击响应(Infinite impulse response,IIR)数字滤波器实现,其常系数线性差分方程[8]为:

x(n)为输入信号序列,y(n)为输出信号序列,ai和 bi为常系数,K,J为阶数。
对上式两边进行z变换,可以得到数字滤波器的传递函数为:

上式中:pi和zi分别为传递函数的极点和零点,滤波器的性能可由传递函数的零、极点确定。因此可以通过合理设计零点和极点来设计带陷数字滤波器[9]。
5 仿真分析
最后在高斯信道下,载波频率1340MHz,码速率10.23Mcps,信号带宽 24MHz,10阶 m 序列扩频的条件下进行了误码率对信噪比的MATLAB仿真,仿真结果如图4-图6所示。
由图4可以看出,在加入了窄带干扰之后,误码
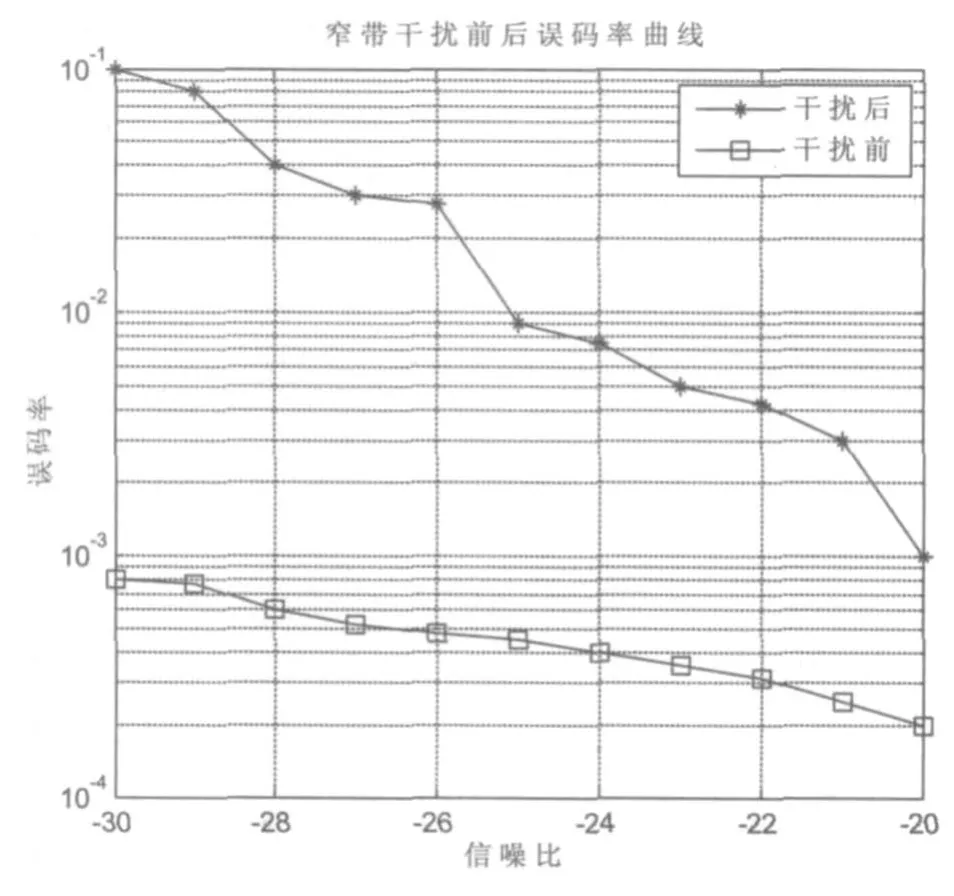
图4 窄带干扰前后误码率变化曲线
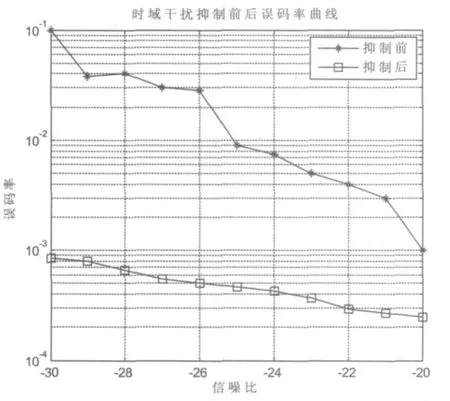
图5 时域干扰抑制前后误码率曲线
6 结 束 语
在分析了北斗卫星导航系统上行注入链路窄带干扰的基础上了,对干扰进行了建模和分析,针对窄带干扰提出了时域自适应滤波干扰抑制和变换域干扰算法,并通过MATLAB进行了仿真验证。仿真结果表明,这两种抑制算法都能有效的对窄带干扰进率变的非常大,已经不能满足系统正常工作的需求。
由图5-图6可以看出,在相同信噪比的情况下,干扰抑制后,信号的误码率明显低于干扰抑制前的误码率,达到了很好的干扰抑制效果,提高了系统的抗干扰性能。并且通过进一步对比可以看出,时域干扰抑制后的误码率曲线略低于变换域处理后的误码率曲线,约有1.6dB的误码率提高,也就是说在北斗上行注入链路的条件下,时域干扰处理技术的性能略优于变换域处理技术。行抑制,并且在上行注入链路条件下,时域的自适应滤波技术的干扰抑制性能优于变换域抑制技术。研究成果将有助于北斗卫星导航系统上行注入链路的抗干扰工程实践,在提高系统的鲁棒性和安全性能上具有一定的指导和借鉴意义。
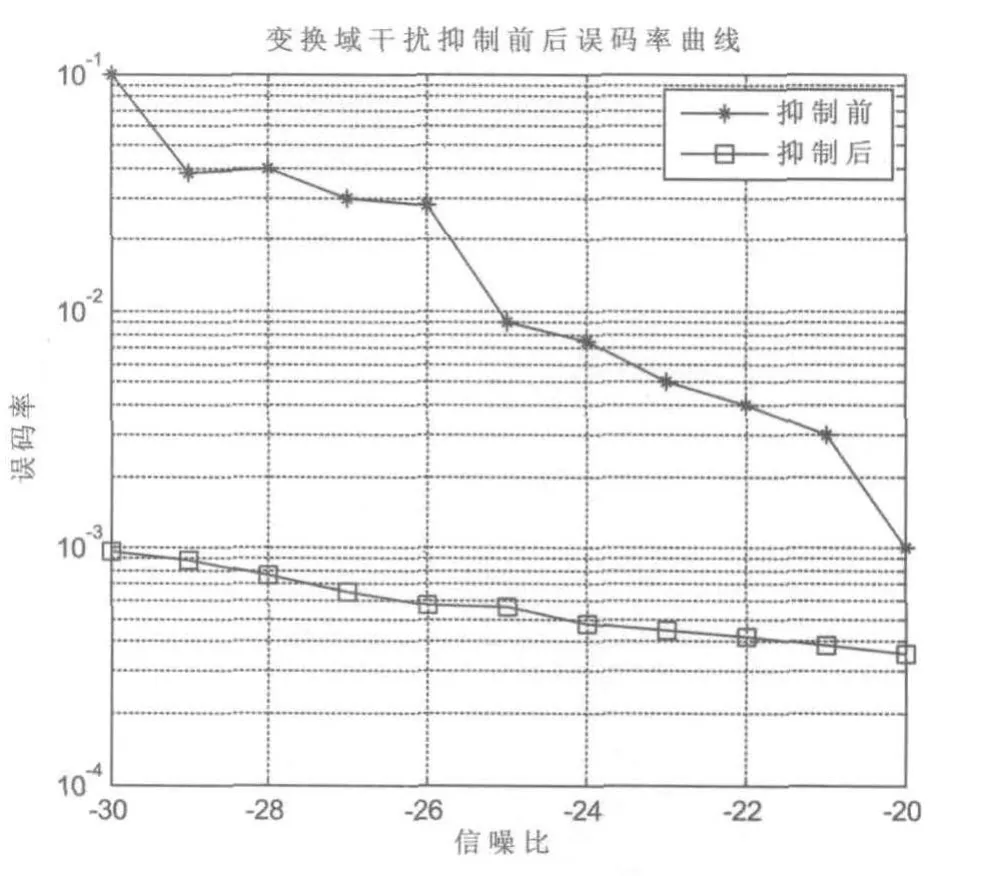
图6 变换域干扰抑制前后误码率曲线
[1]王立松.卫星测控通信抗干扰技术研究[D].长沙:国防科技大学,2010.
[2]赵刚.扩频通信系统实用仿真技术[M].北京:国防工业出版社,2009:70-75.
[3]PETE R STAVROULAKIS. Interference Analysis and Reduction for Wireless Systems[M].Artech House Publisheres,2002:173 -176.
[4]R.A.POISEL.Modern Communications Jamming Principles and Techniques[M].Artech House Publishers,2006:210-219.
[5]W.Hang,W.Zanji,G.Jingbo.Performance of DSSS against repeater jamming[C].IEEE International Conference on Electronics,Circuits and Systems(ICECS),2006,858 -861.
[6]F.Shang.On study of the circular rectangle microstrip antenna used for satellite position system[J].Journal of Xi’an University of Post and Telecommunications,2008,13(3):20-32.
[7]Hui Hu,Kechu Yi.The study of GPS and GPS jamming technology[J].science and technology,2004(8):4l-44.
[8]M.K.SIMO,J.K.OMURA,R.A.SCHOLTZ,B.LEVITT.Spread Spectrum Communications Handbook[M].MeGraw Hill,Ihe.,New York,2002:51 -73.
[9]郭淑霞,胡占涛.卫星导航上行注入链路接收端电磁环境效应预测仿真[C].第四届中国卫星导航学术年会电子文集,武汉,2013.
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
计算机与数字工程(2019年7期)2019-07-31
山东冶金(2019年1期)2019-03-30
数字通信世界(2019年8期)2019-02-13
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年20期)2017-04-26
电子制作(2017年19期)2017-02-02
百科探秘·航空航天(2016年9期)2016-12-01
