颈总动脉超声图像中内中膜定位方法的研究*
2013-09-11 13:09尚长浩
中国医学装备 2013年8期
尚长浩
利用超声成像方法对颈总动脉进行内中膜和斑块情况探查已成为脑卒中早期筛查和诊断的重要方法[1]。目前,大多数超声图像的参数测量都是由超声医生人工进行,存在一定人为误差。而医疗资源紧张、病患数量庞大、多数超声医生工作负荷重、劳累以及负面情绪等不利因素更加大了各项参数测量的误差。应用计算机辅助诊断技术能够克服人工操作的各种缺点,使得超声图像的测量更为精准。而要测量诸如动脉内中膜厚度等参数,首先要在超声图像中找到动脉血管内中膜位置,这是后续工作的基础。
1 颈总动脉超声图像收集方法
颈总动脉超声成像一般使用5 MHz以上高频探头,根据需要取横、纵两种图像,利用多普勒功能进行血流分析以及其他血压、管径变化等检查。在利用计算机进行颈动脉内中膜自动识别定位之前,需要对收集的超声图像做出一些规定,使图像符合预定标准,便于计算机程序处理。
本研究使用SonoSite公司生产的M-Turbo便携式超声成像仪[6]。连接7.5 MHz探头,在受试者颈部取图。超声成像仪开始工作前,先新建患者记录,选择血管(Vascular)检查,使用Zoom和Depth按键对图像放大,便于观察和分析。沿颈总动脉血管走行方向成像(如图1所示)。成像后按Patient键,在出现的界面中选择New/End键关闭本次检查。再按Review键显示患者列表,选择刚才成像的患者ID,在界面下方的菜单中选择Export USB键,即可输出图像至移动存储设备中。在输出图像前要在Setup界面的USB Device下的Export界面将输出图像格式选为BMP,没有任何压缩处理。动态范围(Dynamic range)固定在0。增益调整到合适参数,一般应使动脉外膜有较高亮度,调整合适后在后续检查中固定不变。图像分辨率等其他参数类似处理,在调整好后即固定下来,各个样本均使用相同的设置。

图1 颈总动脉图像示例
2 颈总动脉超声图像特征分析
图1显示,正常人的颈总动脉超声图像中内中膜清晰可辨,血管灰度均匀且灰度值很低,在质量较高的图像中,动脉血管灰度值为0。在整幅图像中只有动脉血管区域有面积较大的极低灰度值区域,这可以作为判别动脉血管区域的依据之一。正常内中膜从动脉腔到动脉壁方向上呈现出灰度值先由大到小,然后变得更大的变化规律,也可作为判别内中膜的依据之一。只要选择合适的判别阈值,即可在图像中判别内中膜特征,进而找出内中膜位置[8]。
3 内中膜定位算法及程序流程
算法和程序的目标是按照颈动脉内中膜在超声图像中的特点,利用Matlab编写程序对图像进行处理,找到图像中内中膜所在的像素位置[2-4]。算法的大体思想是根据图像特点,在图像中沿像素列方向自上而下搜寻长距离连续低灰度值(<5)区域,在找到后横向判断左右区域是否也为低灰度值区域,如果是该区域,则以其为基准向下搜寻灰度值从低到高,再变低再更高的变化区域,然后判断最后的灰度值更高的区域取值是否>200,这是因为在灰度值更高的区域应为动脉外膜,主要为结缔组织其回声较强,灰度值均在200以上(如图2所示)。
读入图像后首先标准化,包括图像灰度值归一化和将图像进行切割。图像灰度值归一化利用公式1对每一点像素进行[5]:

式中Pnew是换算后的像素灰度值,Pold是原来该点像素的灰度值,Pmin、Pmax是整幅图像中最小、最大的灰度值。经归一化后所有像素的灰度值按相同比例分布在0~255区间内。在本研究中该步骤可以省略,因为采集图像的设备参数均固定不变。但在以后进一步开发中,很难保证所有图像都是同一台成像仪器采集,因此标准化必不可少。
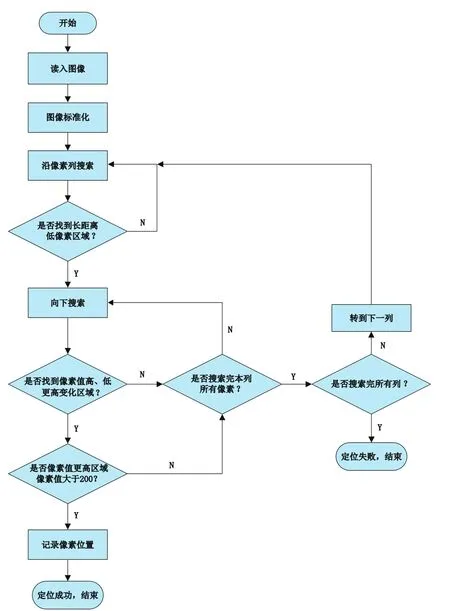
图2 内中膜定位程序流程图
由于图像中含有无用信息,如图1中四周的文字等,因此需要将感兴趣的区域从原始图像中分离出来,以便程序工作。超声成像仪的图像中,真正的组织结构图像一般有固定范围,如图1中的中间区域,不管如何取图,超声图像都只显示在这一固定大小的区域内,因此只要找出感兴趣图像像素的起止行列号,直接在程序中取出即可。本研究取60~410行,85~590列的图像范围作为感兴趣区域。在寻找长距离低像素区域时,采用多个像素累加取均值的方式[10-11]。实验表明,以60个像素灰度值累加后平均基本可以满足需要[7]。按照图1所示图像,根据图中距离标尺计算其分辨率为0.075 mm/pixel,60个像素约为4.5 mm,小于颈动脉宽度,可以在颈动脉内部找到符合条件的区域。图中浅表部位的血管为静脉血管,管腔内有噪声存在,4.5 mm范围内具备足够低灰度值像素的可能性不大,且由于静脉血管管壁构造与动脉明显不同,内中膜远没有动脉清晰[9]。在检查内中膜灰度变化规律时不符合要求,因此在图中不会对动脉内中膜定位产生干扰。除动、静脉外,图中没有其他区域有较大范围的低灰度值区域,满足算法适用条件。
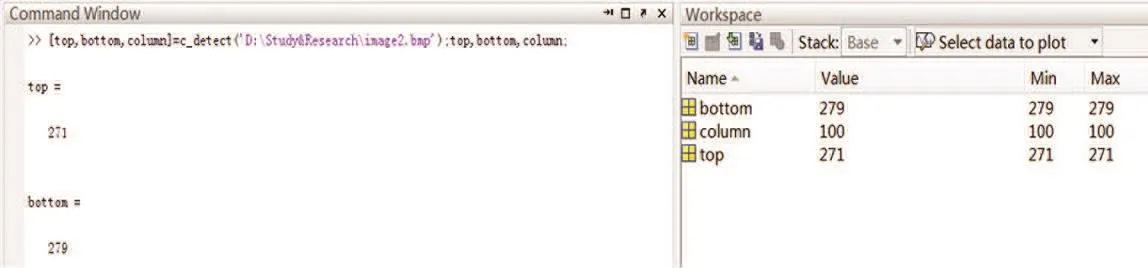
图3 图像的程序定位结果
4 实验及结果
按照上述图像采集方法采集5名受试者的颈总动脉图像均为健康人,其中男性4名、女性1名。利用这些样本检验程序能否准确找到正常颈总动脉内中膜位置。首先利用程序对图像进行处理,给出像素位置,然后将同一幅图像在Photoshop程序中打开,按照程序给出的结果人工在图中寻找相应的像素点,判断程序定位是否准确。程序处理结果如图3所示。
由图3可以看到,程序给出的内中膜位置是第100列的第271行到第279行像素。在Photoshop程序中将图像放大,进行像素位置换算,程序给出的位置在实际图像中是第185列第331行至339行的像素范围,正好是内中膜的厚度,如图4所示。

图4 在Photoshop程序中找到的图像的程序定位位置
从图4可以看到,按照程序给出的位置,找到X坐标第185列,Y坐标第331行,即为内中膜起始像素点,同样在第339行是终止像素点,图像表明,程序定位较准确。
5 结语
本研究所述方法用于颈总动脉超声图像中正常内中膜位置的定位。在5名健康人样本图像上试验,均得到较理想的结果,程序定位精度误差在1~2个像素,即误差±0.15 mm。本研究所述定位方法是在输入图像符合预定标准的前提下应用的,需要图像采集者严格把关,否则采集的图像不满足这一前提算法就未必奏效[12]。要进一步检验算法的准确性和稳定性,需要搜集更多的样本进行试验,对数据进行统计分析,这将在未来的工作中进行[13]。
[1]Rafael Malgor D,Emily Wood A,Otavio Lavarone A,et al.Stratifying risk: asymptomatic carotid disease[J].Vasc Bras,2012,11(1):43-52.
[2]张学工.模式识别[M].3版.北京:清华大学出版社,2010.
[3]张志涌.精通Matlab R2011a[M].北京:北京航空航天大学出版社,2011.
[4]Rafael C,Gonzalez,Richard E.Woods.Digital image processing[M].3rd edition.北京:电子工业出版社,2010.
[5]Sztajzel R,Momjian S,Momjian-Mayor I,et al.Stratified gray-scale median analysis and color mapping of the carotid plaque:correlation with endarterectomy specimen histology of 28 patients.[J].Stroke,2005,36(4):741-745.
[6]Sono Site Inc.M-Turbo超声系统用户指南[M].Sono Site Inc,2009.
[7]Schreuder FH,Graf M,Hameleers JM,et al.Measurement of common carotid artery intimamedia thickness in clinical prac-tice:comparison of B-Mode and RF-Based technique[J].Ultraschall in Med,2009,30(5):459-465.
[8]Bianchini E,Bozec E,Gemignani V,et al.Assessment of carotid stiffness and intimamedia thickness from ultrasound data[J].Ultrasound Med,2010,29(8):1169-1175.
[9]王怀经,张绍祥.局部解剖学[M].2版.北京:人民卫生出版社,2010.
[10]AsmatullahChaudhry,Mehdi Hassan,Asifullah Khan,et al.Atuomatic active contourbased segmentation and classification of carotid artery ultrasound images[J].J Digit Imaging,2013,16(3):306-309.
[11]李国宽,程新耀,周渊,等.超声图像中颈动脉血管内外膜分割[J].华中科技大学学报,2010,38(6):75-79.
[12]郭翌,汪源源,王威琪.超声图像颈动脉内中膜提取方法[J].声学技术,2007,26(5):1034-1035.
[13]谭丽芳,艾红,王娟,等.内中膜厚度定量及动脉僵硬度分析技术评价糖耐量减低及2型糖尿病者颈总动脉改变[J].中国医学影像技术,2012,28(9):1655-1658.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国典型病例大全(2022年7期)2022-04-22
昆明医科大学学报(2022年2期)2022-03-29
分子诊断与治疗杂志(2021年9期)2021-12-02
天津医科大学学报(2021年1期)2021-01-26
长寿(2019年7期)2019-07-15
自动化学报(2017年5期)2017-05-14
中国卫生标准管理(2015年14期)2016-01-15
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
中国卫生标准管理(2015年8期)2015-01-26