ISG型混合动力汽车驱动工况控制策略的试验研究*
2013-09-08 03:48:08叶心,叶明,罗勇
汽车工程 2013年10期
叶 心,叶 明,罗 勇
(1.重庆理工大学车辆工程学院,重庆 400050;2.重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆 400050)
前言
混合动力汽车的控制策略是其节能减排的关键技术之一。并联式混合动力系统的控制策略大致可分为基于模糊控制的智能型控制策略[1-2]、基于规则的稳态控制策略[3]和基于优化算法的动态控制策略[4]3大类,第1类方法不依赖系统精确的数学模型,有利于解决混合动力系统能量分配等复杂问题;第2类是依据工程经验,根据部件的稳态效率MAP图来确定发动机和电机的动力匹配;第3类则在既定驾驶循环工况下,根据最优控制理论动态分配发动机和电动机的动力,从而获得最优的燃油经济性。文献[5]中以发动机稳态效率图为依据划分发动机工作区间,确定动力源的匹配,文献[6]中考虑了功率的损失和发动机的效率,以混合动力系统能量损失最小为目标,采用模糊控制算法,完成发动机和电机之间的动力匹配,文献[7]中以发动机最佳燃油经济区域划分发动机工作区间,采用ANFIS优化算法,对多能源系统动力源进行分配,但发动机效率最优并不代表混合动力系统效率最优。先进汽车仿真软件ADVISOR采用基线控制策略[8],将发动机外特性曲线乘以某系数,得到发动机充电曲线和发动机关闭曲线,在某种程度上确定了混合动力系统动力源的匹配,但未对系数的取值进行研究。文献[9]中通过瞬时优化计算,使混合动力系统在不同工作模式下具有最高系统效率,并通过仿真计算,确定混合动力系统能量管理最佳匹配策略。在此基础上,本文中搭建了硬件在环仿真试验平台,进行了试验研究,并对该控制策略进行了验证。
1 混合动力汽车控制策略的仿真
1.1 研究对象
本文研究的混合动力汽车采用ISG型并联结构,采用该结构的混合动力汽车具有怠速起停、纯电动驱动、联合驱动、轻载时充电和高效制动能量回收等功能,可实现较高的燃油经济性。其结构如图1所示。
整车参数如下:整备质量为1 500kg,迎风面积A=2.28m2,风阻系数 CD=0.34,发动机型号475Q3,ISG电机最大功率为25kW,电池为NIHM288V、6.5A·h,轮胎半径为0.31m,滚动阻力系数为0.0135,传动效率η=0.9,主减速比i0=5.246 6,1~5挡速比为[2.693 2 1.519 6 1.015 6 0.737 3 0.609 4]。
本文中采用优化混合动力汽车的整车系统的方法,获得混合动力汽车不同行驶条件下,两种动力源的最优工作区间,以达到提高混合动力汽车燃油经济性的目的。
1.2 混合动力汽车最优控制策略的建立
根据文献[9]中提出的混合动力汽车在各个工作模式下的系统效率优化计算方法,得到驱动工况下混合动力系统最佳效率控制目标。与传统汽车的系统优化效率相比较,可以看出混合动力系统明显提高了汽车在高速和低速行驶时的整车效率,从而提高了汽车在高速和低速时的燃油经济性。将工作效率在“车速-加速度”平面上进行投影,得到任意车速、加速度下混合动力汽车的驱动工作模式切换规律,确定了ISG型混合动力系统驱动工况下工作模式切换条件:发动机充电曲线Te_chg(ne)、发动机关闭曲线Te_off(ne)和发动机转矩最大工作曲线Te_max(ne)。
根据混合动力系统工作模式的切换规律可知,混合动力汽车的工作模式受到电池荷电状态(SOC)、发动机充电曲线和发动机关闭曲线的影响,即这3种因素决定了发动机和电机转矩动力输出的不同匹配,从而影响混合动力汽车的燃油经济性。
1.3 仿真分析
根据上述3种因素的影响程度,以混合动力系统油耗最低为优化目标,利用Matlab/Simulink仿真平台,对仿真软件ADVISOR进行二次开发,在给定的道路标准ECE_EUDC下,对不同动力源匹配下的ISG型混合动力汽车燃油经济性进行仿真分析。
考虑电池等效油耗的计算方法,在不同条件下,得到电池电量ΔSOC折算后的综合油耗变化关系,如图2所示。由仿真计算结果可知,当XSOC=0.4,Xe_chg=0.9,Xe_off=0.4时,ISG型混合动力汽车的油耗最小,其中,XSOC、Xe_chg、Xe_off分别代表 3 种因素的影响条件。
根据仿真计算结果,将3种因素的影响条件重新带入到仿真模型中,进行仿真计算,结果如表1所示。
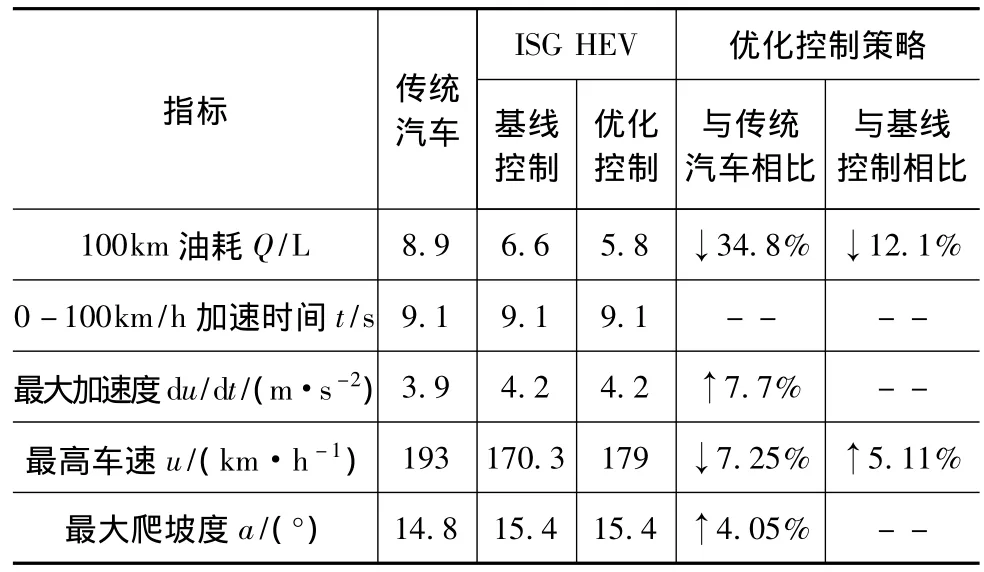
表1 燃油经济性与动力性仿真结果比较
由表1可见,采用优化控制策略后的100km油耗比传统汽车降低了34.8%;比ADVISOR中采用并联型基线控制策略时降低了12.1%。同时,保证了混合动力汽车的动力性。
2 试验研究
台架试验是验证混合动力汽车控制策略有效性的重要测试方法,主要内容包括控制策略可行性以及控制性能优劣验证,以达到缩短样车开发周期和降低开发成本的目的。
2.1 试验台设计方案
本文中基于Matlab/Simulink仿真平台和dSPACE实时仿真系统[10],硬件部分包括混合动力系统动力源、AMT变速器、制动系统、加载装置和数据采集机控制系统,将上述混合动力汽车控制策略理论编写进基于Matlab/Simulink的控制程序,并下载到dSPACE中,控制混合动力系统动力源按照能量管理策略分配功率流,试验台架结构组成如图3所示。
通过ISG型混合动力AMT台架试验系统,对本文中混合动力系统各个工作模式进行控制试验,并验证文献[9]中所提出的控制策略。
本次台架试验的主要内容包括:(1)ISG型混合动力系统功能的验证与调试;(2)ISG型混合动力系统动力总成的协调控制与调试;(3)ISG型混合动力系统工作模式的控制与验证。
2.2 数据采集及控制系统
数据采集与控制系统包括加速踏板和制动踏板的控制,ECU、IPU和BCM通过CAN总线的控制,湿式多片离合器的PWM控制,AMT选换挡与执行机构的控制和制动系统的控制等,其系统框图如图4所示。
2.3 测控软件
本试验中测控软件包括dSAPCE的测控程序、数据采集程序和监控程序。
利用dSPACE/ControlDesk虚拟测试平台在笔记本电脑上开发试验监控系统,如图5所示。监控系统可以控制动力源起停和工作模式,并完成试验数据的保存。
2.4 不同工况试验分析
(1)纯电动工况
根据控制策略理论,汽车在低速行驶时,避免发动机工作在高油耗高排放区间,发动机不起动,由电机单独驱动车辆行驶。因此轻踩加速踏板,混合动力系统工作在纯电动工况下,该工况下的各个参数曲线如图6所示。
根据上述混合动力系统能量管理策略的分析,当SOC(此时 SOC值为0.42~0.55)大于 XSOC=0.4,且整车需求转矩小于Xe_off所确定的发动机关闭转矩时,混合动力汽车在纯电动模式下工作,电机输出转矩约为45N·m,12s以后转矩增加到70N·m;随着电机输出转矩的增加,电流增加到45A。在整个过程中,电池SOC下降了0.09,根据电池等效油耗计算公式[11],这部分电量折合油耗约为18g,低于传统汽车所消耗的油耗22.92g(相同条件下,发动机作为唯一动力源时完成该工况时测得的油耗),此过程油耗降低了21.4%。
(2)行进间起动发动机
随着加速踏板行程的逐渐增大,车速增加到30km/h,连接发动机和ISG电机的湿式多片离合器开始接合,发动机被电机迅速带至1 900r/min左右,完成行进间起动发动机的过程,其间各参数的变化过程如图7所示。
在3s时刻,电机起动发动机,此时的车速和电机转速都发生了略微的突变。冲击度为4.11m/s3,小于国际标准10m/s3;为了维持行驶车速,电机输出转矩为120N·m(发动机反拖转矩为70N·m),当发动机点燃之后,电机转矩逐渐减小,发动机输出转矩维持在50N·m上下,以维持行驶车速不变。在这个过程中,SOC下降了0.045,发动机消耗的油耗约为2.735g,折算后总油耗为10.98g,比传统汽车需消耗的油耗20.89g约减少一半。
(3)轻载充电工况
缓缓踩下加速踏板,初始车速为25km/h左右,加速度为0.631m/s2,且SOC(此时SOC值为0.435~0.38)小于XSOC=0.4时,处于轻载充电模式工作范围,该过程中车速不高且加速度不大,通过提高发动机的负荷率,ISG电机将发动机的部分机械能转化为电能,储存在NiMH蓄电池中。
各个参数曲线见图8,当转速低于1 600r/min时,电机发电转矩逐渐增大到35N·m,同时电池充电电流逐渐增大到14A;当转速达到1 600r/min时,电机转速下降。整个过程的油耗为17.6g,而电池SOC提高了0.036,经折算相当于储存燃油6.413g,等效油耗为11.187g,比传统汽车此过程的油耗15.34g降低了27%。
(4)联合驱动工况
发动机起动后,快速踩下加速踏板,车速迅速上升到40km/h,电涡流测功机随着车速的变化自动进行加载,以模拟汽车的行驶阻力。车速从20km/h加速到40km/h,整个过程加速度维持在1.39m/s2,且SOC(此时SOC值在0.55~0.59之间)大于XSOC=0.4,处于联合驱动模式工作范围,此时电机输出驱动转矩,与发动机共同驱动车辆行驶。
试验结果如图9所示,在低速阶段,ISG电机驱动转矩逐渐增大到20~30N·m,电池放电电流为15~18A,发动机转矩变化平缓,维持在80N·m左右。在中速(30km/h)阶段,ISG电机的驱动转矩维持在30N·m左右,电池放电电流为22A,而发动机转矩为95N·m,这主要是由于通过AMT速比的调节,使发动机和电机的工作点接近整车系统效率较高的区间。在较高速阶段,ISG电机驱动转矩逐渐减小到15N·m,电池放电电流也逐渐减小到10A,发动机转矩基本维持在90N·m左右。整个过程共耗时5s,油耗为8.704g,电池 SOC下降了0.038,相当于消耗燃油6.963g,综合油耗15.667g,比传统汽车油耗26.533g,降低了40.9%。
(5)不同工况试验结果分析
综合各个工况的试验结果,如表2所示。由表可见,按4种工况总油耗的比较,采用所提出控制策略的混合动力汽车,油耗比传统汽车下降约34.8%。
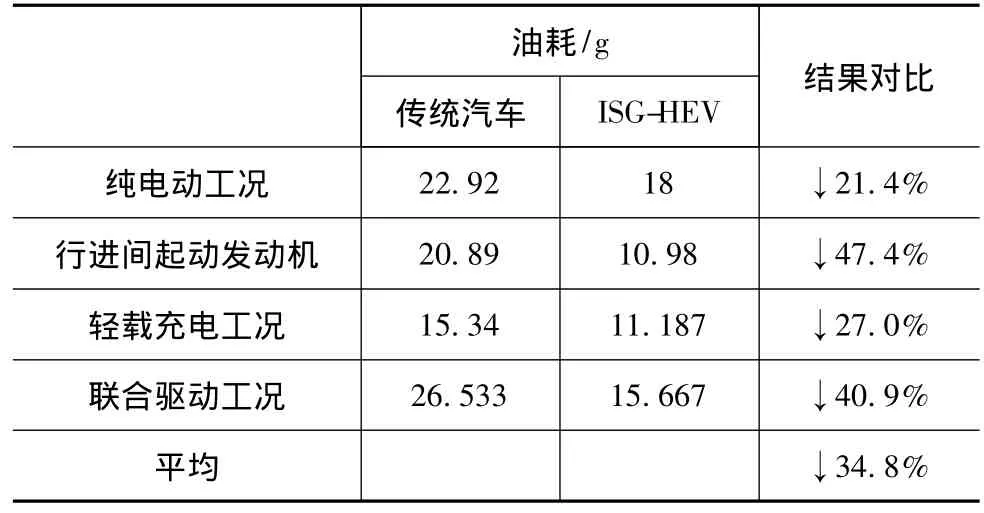
表2 各个运行工况试验结果
2.5 基于道路循环工况数据试验分析
将ECE_EUDC道路循环工况数据下载到dSPACE中,测试在整个道路循环工况下,发动机电机转矩转速以及油耗试验数据,如图10所示。
基于道路循环工况数据测试得到的混合动力汽车油耗、ΔSOC和电能消耗如表3所示。由仿真结果和试验结果对比可知,采用基于效率优先的混合动力汽车控制策略方法,有利于提高混合动力汽车整车效率,提高整车燃油经济性。仿真中未考虑能量转换带来的损失,以及各个动力部件采用静态效率近似代替动态效率,因此,试验结果有一定偏差。另外,试验过程中受到人、环境的影响,试验获得的油耗高于仿真中的油耗。但从试验结果来看,采用本文所提出的控制策略充分利用电能,燃油消耗比传统汽车更少,能更好地提高整车效率,发挥混合动力汽车的潜能。

表3 试验结果
3 结论
基于Matlab/Simulink仿真平台和dSPACE实时仿真系统,搭建混合动力AMT台架试验系统,开发了数据采集及控制系统,对ISG型混合动力汽车驱动工况控制策略开展了实验研究,对文献[9]的仿真结果进行了试验验证。结果表明,尽管由于仿真中的简化,忽略了某些因素,导致按ECE_EUDC道路循环工况的油耗试验数据与仿真结果有较大的误差,但从4种工况的试验结果看,较好地验证了该控制策略的节油效果,平均油耗约比传统汽车降低了35%。
[1] Schouten N J,Salman M A,Kheir N A.Fuzzy Logic Control for Parallel Hybrid Vehicles[J].IEEE Transactions on Control Systems Technology,2002,10(3):460-467.
[2] Bahar D M,Cimen M A,Tuncay R N.Development of Control Strategy Based on Fuzzy Logic Control for a Parallel Hybrid Vehicle[C].ELECO 2009.6thInternational Conference on Electrical and Electronics Engineering,2009:342-346.
[3] Lin Chan-Chiao,Filipi Zoran,Wang Yongsheng,et al.,Integrated,Feed-Forward Hybrid Electric Vehicle Simulation in SIMULINK and its Use for Power Management Studies[C].SAE Paper 2001-01-1334.
[4] Delprat S,Guerra T M,Rimaux J.Optimal Control of a Parallel Powertrain:from Global Optimization to Real Time Control Strategy[C].Vehicular Technology Conference,VTC Spring 2002.IEEE 55th2002:2082-2088.
[5] 童毅,张俊智,欧阳明高.混合动力汽车扭矩管理策略[J].清华大学学报(自然科学版),2003,43(8):1134-1138.
[6] Salman M,Schouten N J,Kheir N A.Control Strategies for Parallel Hybrid Vehicles[C].Proceedings of the American Control Conference,Chicago,Illinois,2000:524-528.
[7] 钱立军,龚著永,赵韩.基于模糊神经网络的混合动力汽车控制策略研究仿真[J].系统仿真学报,2006,18(5):1384-1387.
[8] National Renewable Energy Laboratory.ADVISOR Documentation[G].April 30,2002[version 2002].
[9] 秦大同,叶心,胡明辉.ISG型中度混合动力汽车驱动工况控制策略优化[J].机械工程学报,2010,46(12):86-92.
[10] dSPACE GmbH,Install and Configeration Documents for Release 4.0[G].Germany:dSPACE Gnbh,2003.
[11] Recommended Practice for Measuring the Exhaust Emissions and Fuel Economy of Hybrid Electric Vehicles[S].SAE J1711:1999.
猜你喜欢
车主之友(2022年5期)2022-11-23 07:22:20
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
四川冶金(2018年1期)2018-09-25 02:39:26
消费导刊(2018年10期)2018-08-20 02:57:02
上海铁道增刊(2017年3期)2018-01-22 03:01:18
车迷(2017年12期)2018-01-18 02:16:10
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
建筑机械化(2015年7期)2015-01-03 08:09:00