
基于光电传感器智能车系统的设计
2013-09-03 07:11叶梦君胡长晖张先鹤王小威袁亚军吕高强
湖北师范大学学报(自然科学版) 2013年1期
叶梦君,胡长晖,张先鹤,王小威,袁亚军,吕高强
(湖北师范学院 机电与控制工程学院,湖北 黄石 435002)
0 引言
传感技术与控制技术相结合是构成智能系统的两大支柱,已经被广泛的应用于各个领域,具有重要的研究和应用价值。
光电技术智能车系统行驶的路径为白色KT板,路径中心有宽度为2.5cm的连续的黑色线条。该黑色线条作为智能车行驶的导航信息源。智能车采用反射式红外光电传感器检测路径黑线,并沿着黑线快速行驶。光电管照射到黑色线条和白色路面上,将产生不同反射情况,通过这种不同的反射情况,能找到接收管所在的位置,从而检测智能车相对于路径中心黑色线条的位置,控制智能车的行驶方向和行驶速度。
1 智能车系统的整体结构
光电技术智能车根据功能可分为七个部分:以MC9S12XS128为主控制器的最小系统模块、光电传感器模块、电源管理模块、速度检测模块、舵机驱动模块、电机驱动模块、辅助调试模块。如图1所示为智能车系统的整体结构图。
1.1 主控制器
MC9S12XS128具有128KB的FLASH,12KB的RAM,4KB的EEPROM.片上集成有电压调节、在线调试、时钟产生、定时器、A/D转换、PWM输出等模块,满足智能车对主控制器资源的要求。
1.2 光电传感器
光电传感器采用反射式红外光电传感器ST188,ST188由一个高发射功率红外光电二极管和一个高灵敏度光电晶体管组成。红外发射管的光线照射在白色的底板上,光电晶体管能够接收到反射红外光;红外发射管的光线照射在黑色中心线条上被吸收,光电晶体管不能接收到反射的红外光。
1.3 电机驱动
电机驱动模块是由分离元器件IRF4905和IRFZ48N搭建的H桥,主控制器输出两路PWM控制信号驱动IR4427芯片,控制H桥以驱动电机正反转。
1.4 速度检测
采用光电编码器YZ30D-(4S)-2NA-200,脉冲数200,具有功耗低,抗冲击,重量轻的特点。
1.5 电源管理
电源管理模块将车载输入主电源(7.2V)经多路并联的DC-DC转换后,为主控制器(5V),舵机(6V),光电传感器(5V),电机驱动(5V)等模块供电。
2 光电传感器设计
2.1 光电传感器电路设计
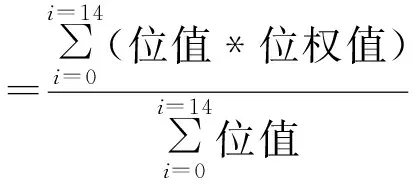
光电传感器的接收电路图如图2所示, 反射式红外光电传感器ST188接收晶体管的输出信号,经放大器LM324组成的比较电路输出。ST188的发射管一直处于工作状态,且工作电流恒定。光电传感器的工作原理是,当红外发射管发射红外线垂直的照射到白色底板上,经反射的红外光线被接收管接收,光敏三极管将导通,比较器输出低电平,实际测量值为0V;当红外发射管发射红外线垂直的照射到黑色导航线上,红外光线未被反射,光敏三极管截至,比较器输出高电平,实际测量值3.4V,因此,光电传感器的输出信号不需要经过AD转换,直接可以通过主控制器的通用I/O口读取。
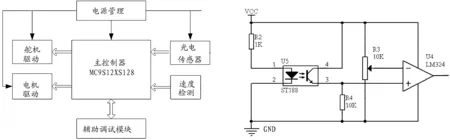
图1 智能车系统整体结构图 图2 光电传感器接收电路
2.2 光电传感器布局
光电传感器布局如图3所示,分为两排安装,黑色圆圈代表光电传感器的位置,前排13个光电传感器,从左至右依次标号为-6~6,后排7个传感器,从左至右依次标号-3~3.前后排距离9cm,前排总长18cm,后排总长9cm,相邻两光电传感器的间距为1.5cm,这样能够保证任意时刻,路径中心黑线都能被光电传感器检测到,而不会因为传感器的间距过大,漏掉黑线。整个传感器模块安装在车身前端,与路径水平面的距离为5cm.
3 信号采集与处理
光电传感器采集的赛道信息,输出信号为高电平或低电平,通过主控制器MC9S12XS128的通用I/O口直接读取该信号,获取光电传感器的信号后,需要搜索是哪个传感器检测到了黑线。本智能车系统采用重心法搜索检测到黑线的光电传感器,重心法计算公式如下:
(1)
在该公式中,位值为光电电传感器输出的信号值取反,当光电传感器检测到黑线其位值为0,否则为1.权位值是每个光电传感器区别于其他光电传感器的编号,如图3所示,每个黑色圆圈内部数字就是该光电传感器的权位值。对于不同的光电传感器检测到黑线,其重心值是不同的,也是独一无二的。因此重心法能够准确的确定是哪个传感器检测到了黑线。在光电传感器模块的前排和后排使用重心法,可以分别找到检测到黑线的光电管的重心值。通过重心值,查表得到舵机的偏转角。当智能车沿直线路径行驶时,智能车的中心轴与赛道中心黑线平行或重合,此时检测到黑线的前排和后排光电传感器的连线与智能车的中心轴平行或重合,智能车的运行方向无需偏转,智能车可以快速行驶。
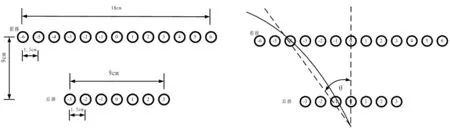
图3 光电传感器布局图 图4 智能车运行示意图
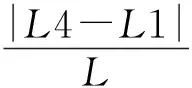
当智能车沿弯道路径行驶时,如图4所示为光电智能车沿弯道运行的示意图,图中底部的黑色椭圆表示智能车的前轮。通的前、后排标号为0的黑色虚直线表示智能车的中心轴。黑色弯曲的实线表示智能车路径上的导航黑线,前排标号为-4,后排标号为-1的光电管能检测到赛道中心黑线。为了顺利通过弯道,智能车需要偏转一定的角度θ,θ为图4中两条黑色虚直线的夹角,计算夹角θ的公式可表示为:
(2)
其中,L4、L1表示标号为4和1的光电传感器到智能车中心轴的距离,它们分别为6cm和1.5cm,L表示前排传感器与后排传感器的距离,为9cm.实际控制中,并不需要计算夹角θ的值。只需要建立tanθ的值与控制舵机偏转角度θ的PWM值之间的关系表,通过查表控制智能车舵机的偏转。
4 速度控制
智能车速度控制决定了智能车系统性能,赛道千变万化的智能车运行系统是典型的非线性系统,很难找到最佳的智能车速度控制的方法,PID控制结构简单、参数易于调整,可以应用于任何可控制对象。数字PID算法易于软件实现,参数易于调整,在智能车系统中能够取得较好的控制效果。速度控制的目标是使智能车能够稳定、快速的行驶,并能在不同的路径上实现不同速度的迅速切换。

图5 智能车闭环调速系统框图
如图5所示为智能车闭环调速系统框图,该闭环系统由数字PID控制器、智能车电机、数字编码器测速反馈环节等组成。位置式数字PID控制算法离散化为:
(3)
智能车调速控制系统使用位置式数值PID控制算法,存在速度超调过大,易震荡剧烈,速度切换调整时间长等缺点,由于光电技术智能车信号检测前瞻性一般,对车速的提高有一定的制约,通过对位置式数字PID算法的改进和实验测试比较,最终确定采用积分分离PID控制算法,积分分离PID控制算法离散化公式为:
(4)
其中,KL为控制系数,当|e(k)|≤e0时,KL=1;当 |e(k)|>e0时,KL=0.e0为积分分离阀值当系。积分分离PID算法的控制原理是,当调速系统的偏差较大时,取消积分项的作用,当调速系统偏差减小到某一特定值e0时 ,积分项的起作用,这种方法有效的减小了智能车系统因行驶过程中的干扰引起的超调,并改善了系统动态特性。
5 系统仿真测试
使用MATLAB仿真软件,建立光电传感器智能车系统的运动控制模型,将智能车运动模型等效为一阶惯性环节,在单位阶跃信号输入的情况下,使用位置式PID控制算法的速度输出曲线如图6所示,其中Kp=1.2,Ki=0.3,KD=0.03.该图显示位置式PID控制的速度输出超调过大,振荡剧烈,尤其在车速快速切换的情况下,会给智能车运行造成过大的震荡。
在单位阶跃输入的情况下,使用积分分离式PID控制算法的速度输出曲线如图7所示,其中e0=0.5,Kp、Ki、KD三个参数保持不变。该图显示积分分离式PID控制的速度输出超调小,震荡小。速度变化平缓。
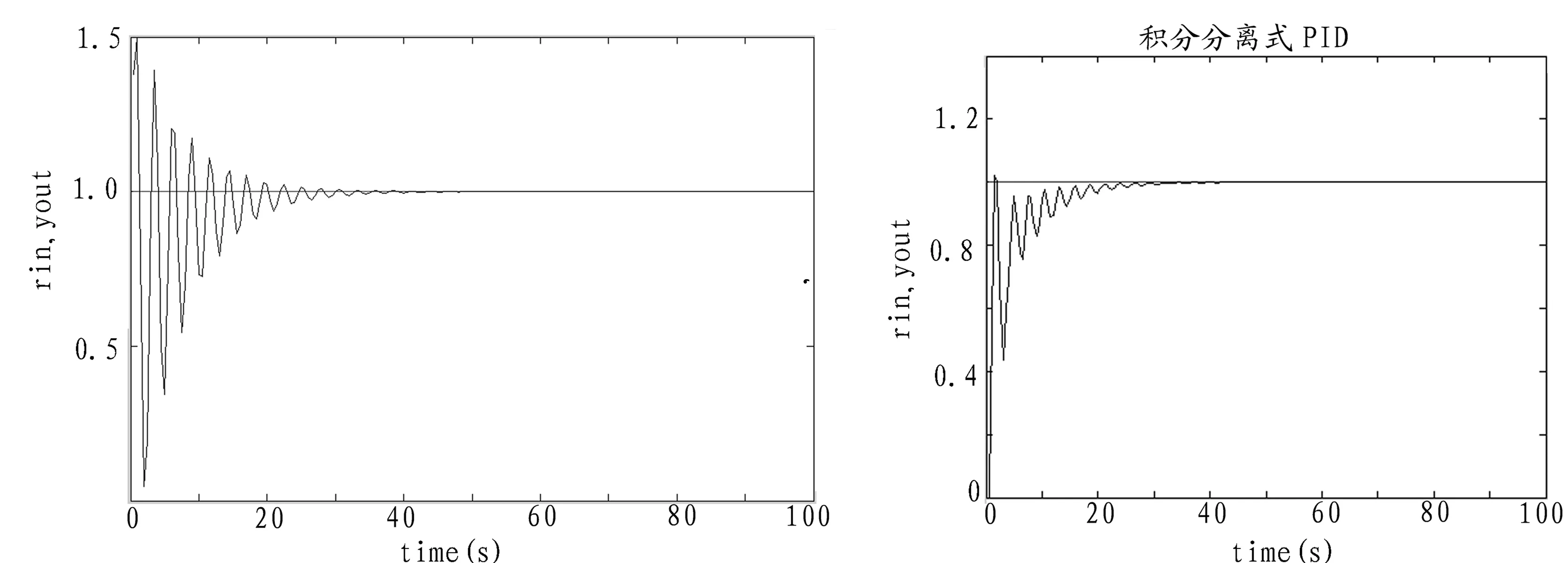
图6 位置式PID控制速度输出曲线 图7 积分分离式PID控制速度输出曲线
光电传感器检测到不同的路径,决定智能车的速度给定值各不相同,对不同的弯、直道,使之能够在保证稳定性的前提下,运行在其最佳速度上,能充分发挥智能车的速度潜能。
6 小结
实验测试表明,基于光电传感器的智能车系统,采用双排光电传感器检测路径信号,采用积分分离数字PID控制算法,实现智能车车速的闭环控制,具有很好的稳定性和灵敏性,极大地发挥了智能车的运行潜力。
本光电传感器智能车,在第五届全国大学生智能车竞赛华南赛区的比赛中,在复杂多变的赛场赛道上,跑出了1.5m/s的平均速度,获得了三等奖。
[1]祝亚峰,李书刚.基于红外激光管的智能车设计[J]. 信息技术,2010,(6):109~111.
[2]胡长晖,叶梦君.基于电磁技术的智能车路径设别的研究[J]. 湖北师范学院学报(自然科学版),2011,(2):54~58.
[3]吴建平,殷战国.红外反射式传感器在自寻迹小车导航中的应用[J]. 中国公路学报,2001,14(3):96~100.
猜你喜欢
红外技术(2022年11期)2022-11-25
中国典型病例大全(2022年7期)2022-04-22
纺织科学研究(2021年1期)2021-03-19
少年文艺·我爱写作文(2020年11期)2020-11-23
制造技术与机床(2017年6期)2018-01-19
饮食与健康·下旬刊(2017年12期)2017-12-06
现代工业经济和信息化(2016年8期)2016-05-17
初中生之友·中旬刊(2015年10期)2015-11-03
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
