
基于dSPACE四轮电动车无刷电机驱动控制系统实验平台研究
2013-08-31 02:31张正中张珊珊
装备制造技术 2013年2期
张正中,张珊珊
(金华职业技术学院,浙江 金华 321007)
在纯电动汽车的开发过程中,仿真技术在设计过程内具有重要的作用,它缩短了设计周期,降低了研制费用,提高了汽车的性能[1]。同时,在纯电动汽车研发阶段,引用HILS(Hardware-in-the-Loop Simulation)作为替代纯电动汽车整车真实环境或设备的一种典型方法,能够提高仿真的逼真性,解决以前存在于系统中的许多复杂建模难题[2],从而可以将纯电动汽车控制系统设计软件开发的控制算法在一个实时的硬件平台上实现,以便观察与实际的控制对象相连时,控制算法的性能。
dSPACE是由德国dSPACE公司开发的一套基于Matlab/Simulink的控制系统开发及测试的设备,它实现了和Matlab/Simulink的完全无缝连接,可以很好地完成控制算法的设计,测试与实现,有效克服了传统控制系统开发存在的上述问题。它具有运算速度快、使用方便和界面友好等优点。dSPACE实时系统功能强大,它既可以和实际控制对象相连(称为快速控制原型),起到主控制器的作用;又可以和实际控制器相连(称为硬件在回路仿真),起到被控对象的作用。因此,利用基dSPACE的控制系统可以达到缩短开发周期以及降低开发费用目的。
1 无刷直流电机模型
三相无刷直流电机采用永磁转子和三相桥电力电子变流器进行电子换向和脉宽调制(PWM)控制,如图1所示。假设:转子感应电流忽略不计,无阻尼绕组,电势为120°平顶梯形波,相电流形波为120°矩形波,则无刷直流电机是一个分段线性多变量系统,在a,b,c 坐标系统中的数学模型为[3]:
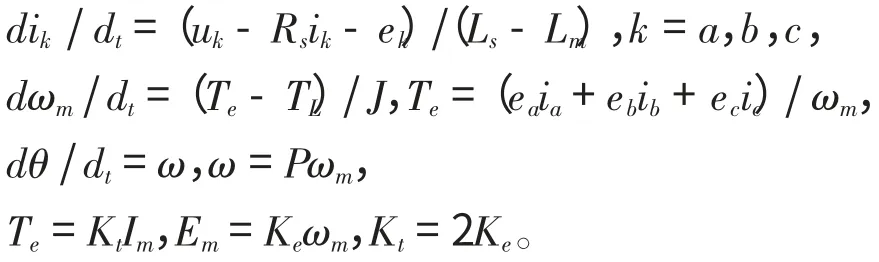
式中,
ia,ib,ic为a,b,c 相电流;
ua,ub,uc为a,b,c 相电压;
ea,eb,ec为a,b,c 相电势;
Im为相电流平顶部分的数值;
Em为电势平顶部分的数值;
Rs为定子相电阻;
Ls,Lm为定子相自感和定子相间互感;
θ 为转子电角;
Ke为电势系数;
Kt=2Ke为转矩系数;
P 为极对数;
Te,TL为电磁转矩和机械负载转矩;
J 为转子转动惯量。
根据磁极位置信号,由分段线性函数产生每相电势信号。无刷直流电机基于转子磁极位置进行电子换向,表现为连续时间与离散事件的混合系统。
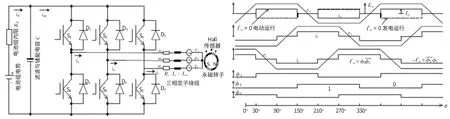
图1 无刷直流电机电子换向主电路、工作波形和换向逻辑
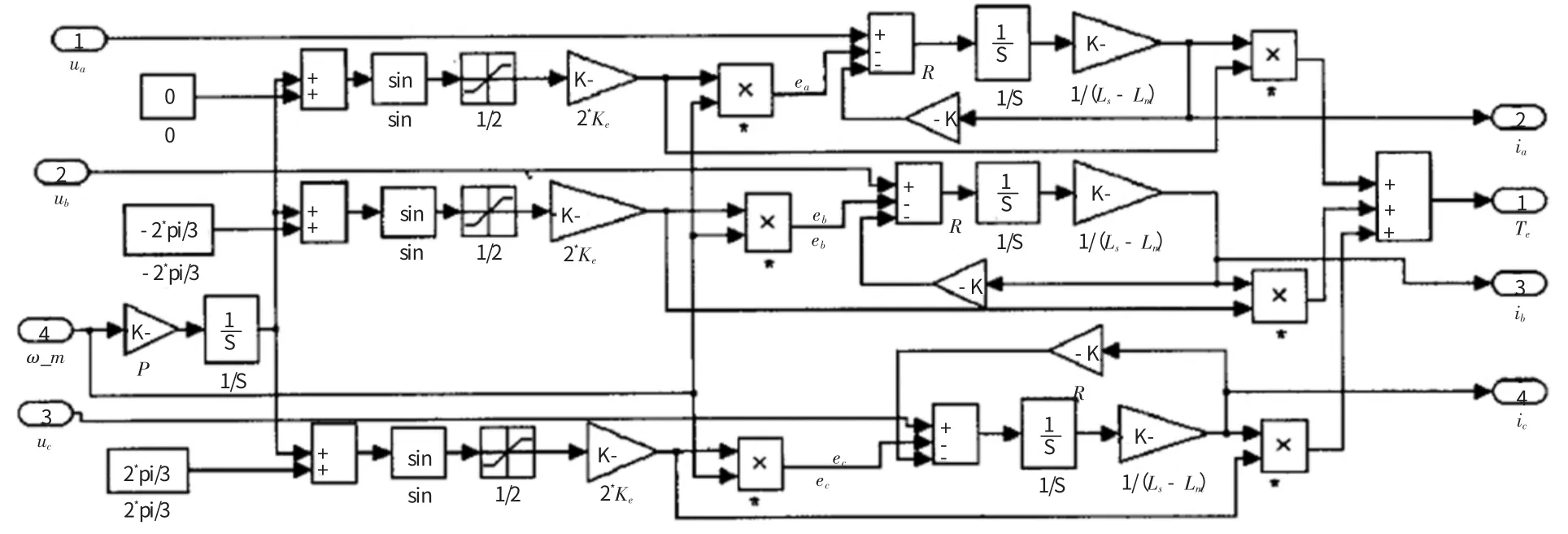
图2 无刷直流电机电气子系统Simulink模型
据上述的数学模型得到图2所示的无刷直流电机电气子系统Simulink框图。图中限幅器的限幅值取为1/2,以获得120°梯形波的三相电势。由于限幅器的增益衰减为1/2,为获得电势ea,eb,ec,其后串接放大器的增益取为2Ke。
2 基于dSPACE的电机控制系统实验平台结构
以DS1005PPC控制器板为核心,配以DS2001AD采集板、DS2002/2003多路A/D采集板、CP4002多I/O板、DS2102DA输出板和DS3002增量式编码器接口板,构成了dSPACE的标准组件系统DS1005的硬件部分[4]。基于dSPACE的电机控制系统实验平台结构框图如图3所示。
从图3可以看出,基于dSPACE的电机控制系统实验平台以dSPACE为控制核心,在外围还需要扩展一些相关电路,如隔离电路、信号处理电路、驱动和功率桥电路、保护电路等,从而构成了一个完整的电机控制系统实验平台。
2.1 dSPACE本身硬件部分
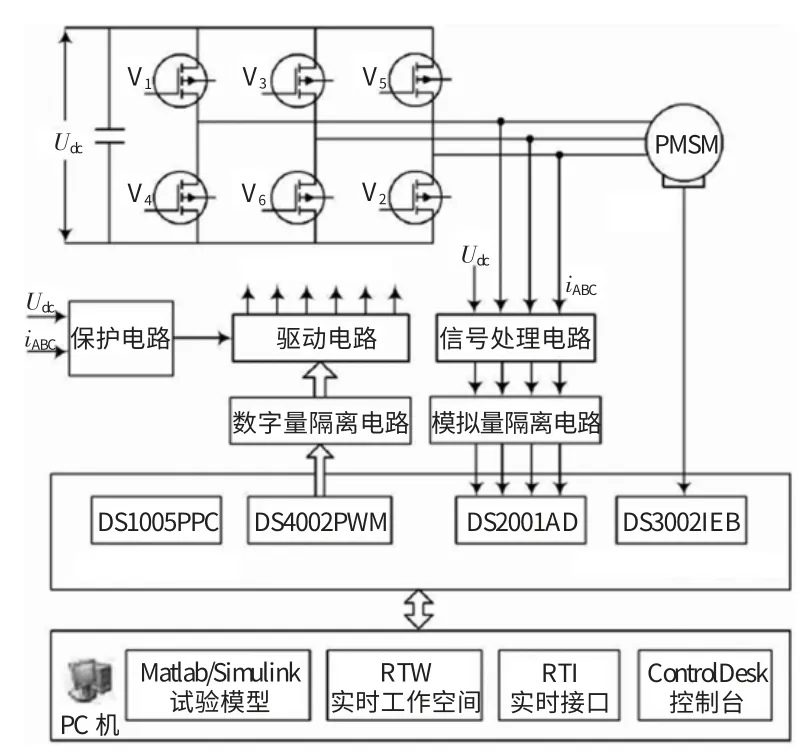
图3 基于dSPACE的电机控制系统结构框图
dSPACE本身已经集成好的硬件部分包括DS1005PPC控制板、DS4002多I/O板、DS2001AD采集板和DS3002旋转编码器接口板等。通过CP4002多I/O板,可以输出6路PWM电机控制信号以控制功率器件的开通和关断;通过DS2001AD采集板可以采集电机的电压和电流等模拟量,尤其是当需要同时采集更多路数的模拟量时,可以使用具有32路A/D采集的板卡DS2002/2003;另外,通过DS3002旋转编码器接口板,可以直接将电机后部带的编码器信号输入至DS1005PPC,从而用于速度检测;此外还有DS2102DA输出板,可以利用它来输出一些信号以方便调试。
2.2 外围扩展电路部分
外围扩展电路部分主要包括PWM信号反相和死区产生电路、模拟和数字隔离电路、电压和电流采集及信号处理电路、驱动和功率桥电路和保护电路等[5]。由于篇幅所限,此处只给出PWM信号反相和死区产生电路,如图4所示。
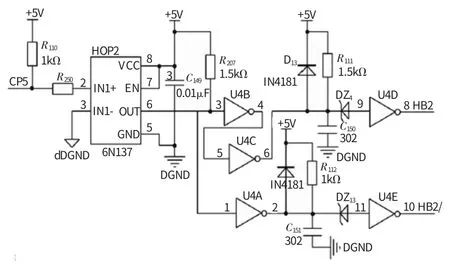
图4 PWM信号反相和死区产生电路
针对控制过程中逆变器同一桥臂的上、下功率器件控制波形反相的特点,控制软件只需输出三路PWM控制信号而由硬件进行反相处理。此外,由于控制电机时的PWM脉宽调制均采用180bPWM导通方式,为避免逆变桥上、下桥臂功率器件同时导通而烧毁功率器件,所以还需在上、下桥臂的PWM控制信号之间加几个微秒的信号延迟,称为死区时间。本文采用由硬件电路来进行PWM控制信号的反相和产生死区时间,这样做的好处在于可以减少软件的运算时间和节省存储空间,且可靠性更高。这样,三路PWM控制信号输入PWM信号反相和死区产生电路后,输出为具有几个微秒的死区时间的六路PWM电机控制信号,从而很方便地用于电机控制。图4显示了三路中的一路PWM信号反相和死区产生电路。该电路主要使用了反相器74HC04来对PWM信号实施反相,同时还利用了电容冲、放电过程及整形电路来产生死区时间。其中,死区时间的大小可以通过选择电容或电阻参数来设置。
3 结束语
本文建立了适合四轮电动车驱动用无刷直流电机模型,设计和扩展dSPACE相关的外围硬件电路,使得dSPACE和MATLAB/Simulink无缝连接的建立起无刷直流电机控制系统实验平台。利用此平台可以缩短四轮电动车用无刷直流电机的实验开发周期,有利于对控制算法的研究和实际应用前的有效验证。
[1]邹 渊,孙逢春,王 军,何洪文.电动汽车用仿真软件技术发展研究[J].机械科学与技术,2004,23(7):761-764.
[2]马培蓓,吴进华,纪 军,徐 新.dSPACE实时仿真平台软件环境及应用[J].系统仿真学报,2010,16(4):667-671.
[3]Pillay P,Krishnan R.Modeling,Simulation,and Analysisof Permanent-Magnet Motor Drives,Part II:The Brushless DC Motor Drive[J].IEEE Transactions on Industry Application,1989,25(2):274-279.
[4]薛定宇,陈阳泉.基于Matlab/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[5]杨 涤,李立涛,杨 旭,等.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
防爆电机(2020年4期)2020-12-14
河北理科教学研究(2020年1期)2020-07-24
通信电源技术(2018年3期)2018-06-26
电子制作(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
电子制作(2016年1期)2016-11-07
中国高新技术企业(2015年23期)2015-06-24
