
利用新特征空间的SAS图像目标分类算法
2013-08-30 10:00:30丁雪洁刘纪元江泽林
计算机工程与应用 2013年21期
丁雪洁,解 恺,刘 维,刘纪元,江泽林
DING Xuejie,XIEKai,LIU Wei,LIU Jiyuan,JIANG Zelin
中国科学院 声学研究所,北京 100190
Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China
合成孔径声纳(Synthetic Aperture Sonar,SAS)由于能够得到方位向和距离向精度很高的图像而成为当前研究的热点[1]。近年来,随着合成孔径声纳成像技术的发展,声纳图像的自动检测与分类具有重要的研究价值[2]。
水下成像声纳的识别系统可分为以下几个步骤:图像预处理,图像分割,特征提取和分类等。近年来,基于马尔可夫随机场的分割算法得到深入研究,应用于声纳图像中取得较好的效果[3],在传统的识别算法中,常常采用不变矩作为目标的特征[4-5],但是声纳图像往往受到较大噪声的干扰,目标边界较模糊,若仅使用不变矩作为目标的特征时常会引起分类的错误。文献[6]采用链码离散曲率对RD仿真产生的SAS图像进行了分类,但没有考虑目标的阴影信息。在SAS目标的识别中,阴影信息具有一定辅助作用,它可以提供通过目标区域本身不能得到的互补信息。文献[7]通过实验验证SAS图像不同种类目标统计参数的特性有利于识别。在分类算法中,由于无监督型聚类算法能揭示出数据的内在结构,体现出对数据描述的透明性,所以被广泛关注。在众多无监督聚类算法中,k-均值聚类算法由于简单易行,且分类效果好被广泛使用[8]。
本文提出一种利用新特征空间的合成孔径声纳图像自动分类算法。首先采用马尔可夫随机场对图像进行分割,得到感兴趣区域。提取阴影的几何特征和目标的归一化中心矩,同时还将SAS图像中统计特性中参数之间的差异作为特征。最后采用k-均值聚类算法进行分类。
1 合成孔径声纳图像的自动分类算法
水下成像声纳的识别系统包含四部分:图像预处理、图像分割、特征提取以及分类判决,其原理如图1所示。

图1 水下成像声纳识别系统
本文图像预处理分别采用均值滤波和直方图均衡去除噪声以及增强图像对比度,图像分割采用马尔可夫随机场将图像分割成三部分,背景,阴影和目标,将感兴趣区域划分出来,对感兴趣区域进行特征提取,最终选用k-均值聚类进行分类。
2 基于马尔可夫随机场的图像分割
基于马尔可夫随机场的分割方法是一种利用图像中像素间的空间相关性进行分割的方法,它能够准确地描述每个像素所属类别与周围像素类别之间的重要依赖关系。若假设Y为观测场,F为标识场,则图像分割问题可转化为求解下式:

其中,U(y|f)与背景、目标、阴影的统计特性有关,定义为统计能量,U(f)与背景、目标、阴影的结构有关,定义为结构能量。由式(1)可知,分割由最大后验概率估计变为求解最小化能量函数的问题,本文采用模拟退火方法(SA)进行优化求解。图2是所要分类的三类物体各取一个样本的分割结果。

图2 图像分割结果
3 特征提取
特征提取的目的是利用各种优化的变换技术改善特征空间中原始特征的分布结构,压缩特征维数,去除冗余特征,减小计算量。特征提取是实现机器识别的重要环节,这些特征是进行机器识别和分类的重要依据,选择不同的特征集会产生不同的识别率和分类效果。
3.1 阴影区域的几何特征
在SAS的识别中,阴影信息具有一定的作用,它能够提供目标区域本身不能得到的互补信息。
(1)面积,是物体尺寸的一种度量方式,其计算方法是统计并计算边界内部的像素的数目即

(3)偏心率,是阴影自身长轴与短轴的比值:r=EL/ES,其中EL长轴为目标轮廓上相距最远的两个像素点之间的连线,ES短轴为与长轴垂直的连线。
(4)形状参数用来描述区域的紧凑性定义为:F=A/p2。
(5)方向值,为主轴方向与水平轴的夹角θ=∠(EL,x)。
(6)目标与阴影最大宽度比值为目标长轴与阴影长轴的比值即W=EOL/ESL。
则由阴影几何特征所组成的特征空间为 f1=[A,p,r,F,θ,W]。
3.2 归一化中心矩
对于一幅二值图像 f(x,y),x=1,2,…,M,y=1,2,…,N,则(p+q)阶中心矩为:

若令 f(x,y)=1则 m00是区域面积,(m10,m01)为目标区域的质心坐标,则归一化的中心矩为:

Cpq则由目标归一化中心矩所构成的特征空间为 f2=(C11,C02,
3.3 统计特征
利用威布尔分布模型的自适应性可以较准确地描述SAS图像各区域的分布特性。假设SAS图像中目标、阴影和背景均服从威布尔分布即 W(λO,ξO)W(λS,ξS)W(λB,ξB),威布尔分布模型中含有多个自由度,参数取值的不同可得到多种不同的分布特性,像素灰度值的威布尔分布概率密度为:

式中,y>min为图像各像素点的灰度值,λ为形状参数,ξ>0为尺度参数。由最大似然估计,得到如下的参数估计值:

式中,ŷmin为图像灰度级序列中的最小像素值,采用迭代收敛的方法求解λ̂值。通过求解各类目标不同部分之间参数的差异作为新的特征。分别用λS,λB,λH表示阴影区域、背景区域和目标区域的形状参数,用ξS、ξB、ξH表示阴影区域、背景区域和目标区域的尺度参数,则∆λSB=λS-λB以此类推求解各参数之间的差异。基于图像统计特性所构成的特征空间表示为 f3=(∆λSB,∆λHB,∆λSH,∆ξSB,∆ξHB,∆ξSH)。

表1 阴影部分的几何特征数据均值

表2 目标归一化中心矩数据均值

表3 统计特性特征数据均值
综上所述,新的特征空间为 f=[f1,f2,f3]。
4 分类器的设计
由于是基于非监督分类,故没有学习训练的过程,因此所有的样本均作为聚类的样本数据。其算法简述如下:
(1)设置类别数为K,为每个类别的聚类中心赋初值{z1(l),z2(l),…,zk(l)}。其中,zj(l)代表第 l次迭代的聚类中心值。
(2)计算每个样本数据与聚类中心的距离,若D(fi, zw(l))=min{D(fi, zj(l))}
则 fi∈Sw(l);Sw(l)代表第l次迭代时类别w的全体。
(3)计算新的聚类中心zj(l+1)。
(4)判断是否收敛 zj(l)=zj(l+1),否则返回步骤(2)。
5 实验结果
采用浙江千岛湖实验数据,对三类目标进行分类,实验样本数目分别为:A物体(掩埋目标)50幅;B物体(圆柱形目标)25幅;C物体(自然目标)16幅。结果如表1所示。
由表1可知,物体A的面积与周长要较大于物体B与C,物体B的偏心率低于物体A和C;方向角最大的是物体B,阴影与目标的宽度值上三类物体相差并不大。
由表2可知,在归一化中心矩中,三类物体在绝对值上差距明显。其中,物体A和物体B各个中心矩的绝对值相差较大,物体B与C的差距较小,但是仍可作为区分各类的依据。
由表3可知,物体B的阴影与背景形状参数相差最大,物体C的目标与背景形状参数相差大于物体A和物体B。物体C的尺度参数阴影与背景的差异绝对值最大,而目标与背景的尺度参数差异三类无明显差别。自然目标的阴影与目标尺度参数差异的绝对值最大,物体A与物体B相差不大,物体B略高于物体A。
为了证明采用新的特征空间的有效性,分别采用特征空间 f1和特征空间(f1,f2)与其对比,其结果如表4~6所示。

表4 采用特征空间 f1的分类结果
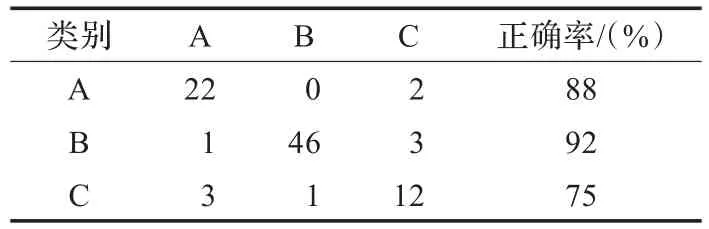
表5 采用特征空间(f1,f 2)的分类结果
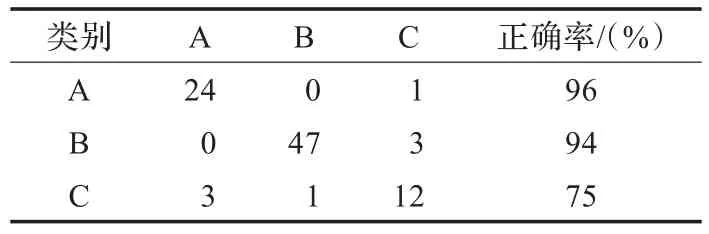
表6 采用新的特征空间 f的分类结果
由表4~6可知,与选用特征空间 f1和特征空间(f1,f2)的分类结果相比可知,A类物体的分类正确率分别提高了16%和8%;B类物体的分类正确率分别提高了4%和2%;C类物体的分类正确率分别提高了12.5%和0%。综上可知,选用新的特征空间对区分三类物体的有效性。并且可以看出,选取以上特征空间在识别物体A和B上都有很好的结果,物体C的结果偏差,自然物体由于目标轮廓模糊,不易区分,因此还需进一步研究,找出更好的能够区分人造目标与自然目标的特征空间。
实验分析,通过分类的正确率可以看出,新的特征空间具有比较理想的特征集,选取的特征具有可区别性,独立性和视觉不变性。
6 结论
本文提出了一种基于合成孔径声纳图像的目标分类方法,使用马尔可夫随机场对SAS图像进行分割,找到感兴趣区域,分别提取目标归一化中心矩、阴影几何特征和统计特性三类特征,组成了特征空间。最后,利用无监督分类算法k-均值聚类算法完成了分类。合成孔径声纳湖试图像验证了算法的有效性,具有一定的理论意义和工程实践意义。
[1]Engstrom J.Tools for classification of mime-like objects in synthetic aperture sonar images[D].Goteborg,Sweden:Halmers University of Technology,2007.
[2]Maussang F,Chanussort J,Amate M.Mean-standard deviation representation of sonar images for echo detection:application to SAS images[J].IEEE Journal of Oceanic Engineering,2007,32(4):956-970.
[3]叶秀芬,王兴梅,方超,等.基于改进的马尔可夫随机场声纳图像分割方法研究[J].兵工学报,2009,30(8):1039-1045.
[4]时长江.豆科类杂草种子图像识别系统研究[D].青岛:中国海洋大学,2009.
[5]付燕,詹新光.一种有效的SAR图像目标识别方法[J].计算机工程与应用,2010,46(15):156-158.
[6]姚冰.合成孔径声纳成像及目标检测与识别技术的研究[D].哈尔滨:哈尔滨工程大学,2010.
[7]Fandos R,Zoubir A M.Optimal feature set for automatic detection and classification of underwater objects in SAS images[J].IEEE Journal of Selected Topics in Signal Processing,2011,5(3):454-467.
[8]刘应东,牛惠民.基于K-均值聚类的小样本集K NN分类算法[J].计算机应用与软件,2011,28(5):112-125.
[9]倪新强.SAR图像分类与自动目标识别技术研究[D].北京:中国科学院电子学研究所,2007.
[10]王彪.声纳图像的处理及目标识别技术研究[D].兰州:西北师范大学,2005.
猜你喜欢
文苑(2020年11期)2020-11-19 11:45:11
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
中学生数理化·高一版(2020年1期)2020-02-20 13:24:32
中国诗歌(2019年6期)2019-11-15 00:26:47
中学生数理化·八年级物理人教版(2018年10期)2018-12-06 09:33:16
电子测试(2018年14期)2018-09-26 06:04:12
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
火控雷达技术(2016年2期)2016-02-06 02:29:03
