
模糊-PID控制器在静电悬浮转子微陀螺起支控制中的应用
2013-08-26 02:48肖奇军李胜勇陈文元刘超英
机械与电子 2013年8期
肖奇军,李胜勇,陈文元,刘超英,崔 峰,黄 伟
(1.肇庆学院电子信息与机电工程学院,广东 肇庆 526061;2.厦门蒙发利科技(集团)股份有限公司,福建 厦门 361009;3.上海交通大学微纳科学技术研究院,上海 200030)
0 引言
近年来,MEMS惯性传感器在汽车、虚拟现实和机器人等方面得到广阔的应用。目前,常用的主要是振动式陀螺,它需要检测振动质量块科氏力的大小,另外,还需要驱动频率和检测共振频率匹配以提高精度,这对机械制造提出了更高的要求,而静电悬浮转子微陀螺利用静电力来悬浮并旋转微小扁平转子,由于转子的悬浮,机械悬浮微陀螺能消除机械摩擦力,高速旋转的转子能产生比振动陀螺更高的角动量,从而能大大提高检测精度。另外,静电悬浮转子微陀螺有其独有的研究优势,集陀螺、加速度计多功能于一体,可以同时测量两轴角速度和三轴线加速度,采用力平衡原理和力矩平衡原理测量壳体输入的线加速度和角速度,即对转子实行闭环控制,使转子保持在零位,输出控制电压反映壳体输入角速度的大小,易实现高精度和低功耗的载体角速度和线加速度的测量。静电悬浮转子微陀螺由于具有微陀螺/加速度计的五轴惯性测量功能,特别适用于捷联式惯导系统[1-4]。
针对转子结构,提出了一种基于模拟PID技术的非集中控制策略来实现起支控制,对起支控制的非线性特性,采用了模糊-PID控制器。
1 静电悬浮转子微陀螺的结构设计和悬浮控制系统组成
基于准LIGA技术的静电悬浮电铸Ni转子微陀螺的采用三明治结构,其主要包括上、下玻璃衬底电极,中间是电铸Ni转子。在上、下玻璃衬底上设置有轴向悬浮控制电极对、公共电极、驱动电极和径向悬浮电极,外圈为8块(4对)轴向悬浮电极和4块间隔排布的公共电极。轴向悬浮电极用于对转子3个自由度的检测和控制,即沿Z轴的线运动和绕X轴和Y轴的角运动。中间一圈环向均匀排布着12块旋转驱动电极。上/下定子极板的所有驱动电极分为三相,分别与转子中间的驱动齿(轮辐)构成检测/控制电极对,对其中两相电容进行差动检测获取转子的位置和转速,并基于变电容静电马达驱动原理,进行三相顺序供电以实现微陀螺的恒速控制。
陀螺结构原理如图1所示。其中,内圈为公共电极,所有公共电极连在一起,用于施加高频载波激励信号,通过调幅(AM)和相敏解调的方式,实现转子六自由度位置检测(五自由度悬浮和旋转)。定子极板中心处凸起为轴向止挡台和径向止挡柱,分别用于约束转子轴向和径向的过大位移,以免损伤悬浮电极。所有公共电极是相连的,定子中心处的轴向止挡台和径向止挡柱分别用于约束转子轴向和径向的过大位移,以免转子碰伤定子电极。轴向止挡台还可用于轴向悬浮时减少起支控制电压的作用,还可用于转子静止时释放其上的积聚电荷,以保证悬浮转子为零电位,提高电容位移检测精度。为减少起支时的压膜阻尼和旋转时的旋转粘滞阻尼,需要封入吸气剂并进行真空环境下焊接密封[5]。

图1 陀螺结构
静电悬浮控制系统由微陀螺、位移检测电路和静电悬浮控制单元等组成,采用力平衡原理和力矩平衡原理,可同时实现二轴角速度和三轴线加速度的测量,位移测量单元主要是采用微电容测量原理来测量转子相对于壳体的转角、位置,作为反馈信号输入到悬浮控制单元,采用模拟PID控制策略实现转子的起支和稳定悬浮。为了实现转子轴向的悬浮,采用上下各4个电极对控制转子的位移和转角。Z向悬浮控制器的坐标如图2所示。常采用的是集中控制和非集中控制的方法,非集中控制方法如图3所示。控制器输出4路反馈控制电压和偏置电压叠加后输出到控制电极,4个PID控制器是独立的,其控制参数可以相等。由于3个自由度被4个控制器所控制,系统不稳定。其特点是控制方法简单,只需要找到转子与各个电极对之间的机械零位,对各自的控制电极同时加电,使转子悬浮到零位附近[6]。

图3 非集中控制策略
悬浮控制单元包括起支控制和稳定悬浮控制。其中,起支控制是用可控静电力将转子从下定子处悬浮到空腔几何中心附近,它对静电悬浮转子微陀螺的控制尤为重要,为了保证静电陀螺的精度和寿命,要求起支过程的超调小,振荡次数少,转子至电极之间不发生静电击穿。
2 模糊-PID控制器设计
由于静电力和阻尼力在大范围存在的非线性,单纯使用线性控制器很难提高系统的鲁棒性,因此,采用现代控制理论的智能控制对起支进行控制。模糊控制无需精确的数学模型,且具有较强的鲁棒性、结构简单和动态性能佳等优点,对被控对象的非线性和时变性具有一定适应能力,特别适合于非线性控制而应用在起支控制中。
模糊控制器主要由模糊化、推理机和解模糊组成[7]。模糊控制器的设计步骤如下:模糊控制器的结构选二维模糊控制器,它的2个输入变量基本上为输入给定的偏差E和偏差Ec,然后确定模糊控制器的结构,建立模糊控制规则,最后确定去模糊化方法,故采用加权平均法。
选取语言变量E,Ec与U 的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB},选择E,Ec的论域均为{-3,-2,-1,0,1,2,3},U 的论域为[-4.5,-3,-1.5,0,1.5,3,4.5]。模糊规则的选择是设计模糊控制器的核心,其设计原则是:当误差较大时,控制量的变化应尽量使误差迅速减小,加快系统响应速度;当误差较小时,除消除系统稳态误差外,还要考虑系统的稳定性,防止系统产生不必要的超调,甚至振荡。根据人的直觉思维建立模糊控制规则,由系统输出的误差及误差的变化来消除系统误差的模糊控制规则,模糊语言变量的隶属度函数为三角形,可提高其灵敏度。在误差较小的地方较为陡峭,可提高其精度,在误差较大的地方较为平缓,可提高其速度。
对于输入E和Ec的不同等级,由计算机离线算出控制量U,生成控制查询表存放在计算机中。在进行实时控制时,根据每次采样得到的被控量与给定值做比较,计算误差e和误差变化量ec,并分别乘以输入量化因子Ke和Kec,经量化后得到模糊控制器输入E和Ec,根据这2个值查找查询表得到控制量U,并乘以输出比例因子Ku限幅输出后得到控制电压,可获得模糊控制器输出。Ke相当于PID控制的KP参数,Ke选取得越大,相当于缩小了系统的基本论域,增大了误差的控制作用,系统上升时间短,但是超调量增大,甚至使系统发生振荡而不稳定,使系统的过渡过程变长。Kec相当于PID控制的Kd参数,Kec选取较大,超调量减小,但是系统的响应时间长,Kec减小,引起较大的超调甚至会引起振荡。Ku选择过小使系统响应时间变长,快速性变差,增大稳态误差;选择过大,则系统上升速率大,将使系统发生较大超调,从而延长过渡过程,甚至使系统发生振荡。建立模糊控制器模型如图4所示。
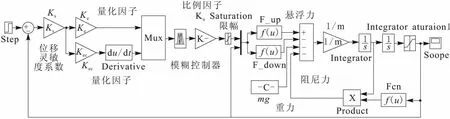
图4 模糊控制器
常规的以误差和误差变化作为输入的二维模糊控制器相当于1个PID控制器,由于模糊分档的继电器优点,使其控制动作欠细腻,在输入为零档容易发生振荡,尽管它具有良好的动态性能,由于其钝化了对输入变化的敏感程度,系统存在固有的稳态误差。因此,把PID控制引入模糊控制,可以改善模糊控制的稳态性能,模糊-PID开关切换控制的基本思想是在大偏差范围内采用模糊控制,加快其响应速度,在小偏差范围内采用PID控制,从而提高模糊控制的稳态精度,其结构比较简单,可以应用在起支控制中。模糊-PID控制比PID控制有更快的动态响应,更小的超调,显然它比模糊控制具有更高的稳态精度。
设计的模糊控制如图5所示。主要由1个模糊控制器和1个PID控制器组成,它根据输入误差取值的不同,自动选用模糊控制器或PID控制器。PID控制器和模糊控制器之间的转换由控制程序根据阈值et自动完成,当|e|>et时,选用模糊控制器,当|e|<et时,选用PID控制器。模糊控制器采用典型的以误差e和误差的变化ec作为输入的二维模糊控制器的结构,采用模糊查询表法,其具有结构简单、实施方便和在线运算速度快的优点。模糊控制规则表如表1所示。其特性如图6所示。
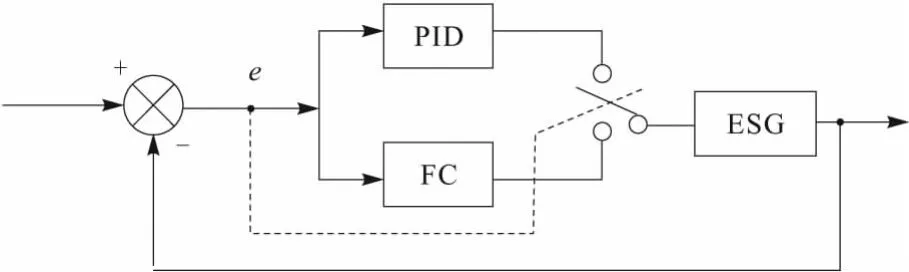
图5 模糊-PID控制器

表1 模糊控制规则表

图6 模糊控制器特性
3 控制系统设计
静电悬浮控制系统总体设计如图7所示。为了实现闭环控制,整个系统包括电容检测部分、DSP数字信号处理器和控制电压放大和合成部分。电容检测部分包括载波和参考载波信号发生器、前置放大器、交流放大器、相敏解调和低通滤波。控制部分包括高压运算放大器。信号处理和控制器则采用DSP控制器。基于DDS技术的信号发生器由89C51控制,以产生频率和相位可调的正弦波作为调制和解调信号,从公共电极输出的信号为电容差动变化调制信号,经过前置放大器后转换为电压信号,再经过低噪声宽带AC放大器两级放大后,提供给锁相放大器,它和同相位参考信号进行相乘后,然后经过1kHz截止频率的八阶巴特沃斯低通滤波器后获得直流信号反映转子位移的变化。从DSP输出的电压经过高压放大器放大后成为控制电压,然后和偏置电压和载波信号相加施加在陀螺控制电极上,使转子回到零位。32位DSP数字控制器(TMS320C33)作为悬浮控制器控制转子的悬浮位置,其采样率为10kHz,具有多通道AD转换端口和DA输出端口,并具有和计算机通讯的功能,能接收控制参数。上位机软件采用VC++编写,具有数据存储、数据显示和绘图功能。

图7 整体设计原理
4 实验结果分析
图8显示了使用PID控制2通道起支控制结果,示波器通道1显示转子沿f1方向检测电压变化,通道2显示控制电压变化,通道3和通道4显示沿f2方向的检测电压和控制电压的变化。从图8a可以看出,转子运动到中心位置,在起支的初级阶段,控制电压最大,施加在上极板的电压是预载电压的2倍,施加在下极板的电压为零以获得最大的静电力,当转子移动到中心位置附近,控制电压下降到稳定值,上极板电压大于下极板电压以克服转子重力。

图8 实验结果
采用PID控制器稳定时间为32.2ms,,超调量为27%,而采用模糊-PID控制的调节时间为25ms,超调量为20%,可见模糊-PID控制器大大提高了系统的动态性能。
5 结束语
针对二自由度静电悬浮转子微陀螺的悬浮控制结构,进行基于PID控制的非集中悬浮控制策略研究 ,由于悬浮控制系统是一个非线性、强耦合系统,利用传统控制理论很难解决非线性问题,因此,提出了基于非集中控制策略的模糊-PID控制器。从悬浮控制实验结果看出,模糊-PID控制具有比传统PID控制更好的动态性能和鲁棒性。
[1]Cui F,Chen W Y,Su Y F,et al.Design of electrostatically levitated micromachined rotational gyroscope based on UV-LIGA technology[C].Proceedings of SPIE,2004,5461:264-275.
[2]Murakoshi T,Fukatsu K,Nakamura S,et al.Electrostatically levitated ring-shaped rotational gyro/accelerometer[J].Jpn.J.Appl.Phy.,Pt.1,2003,42(4B):2468-2472.
[3]崔 峰,苏宇锋,张卫平,等.静电悬浮转子微陀螺及其关键技术[J].中国惯性技术学报,2005,13(6):63-64.
[4]Houlihan R,Kraft M.Modelling of an accelerometer based on a levitated proof mass[J].Joural of Micromechanics and Microengineering,2002,(12):1-8.
[5]崔 峰.基于UV-LIGA技术的静电悬浮转子微陀螺的相关技术研究[D].上海:上海交通大学,2007.
[6]Xiao qi-jun,Chen wen-yuan,Li sheng-yong,et al.Modeling and simulation of levitation control for a micromachined electrostatically suspended gyroscope[J].Microsystem Technologies,2010,16(3):357-366.
[7]刘金琨.先进P ID控制及其 Matlab仿真[M].北京:电子工业出版社,2003.
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
科学大众·小诺贝尔(2016年11期)2017-01-10
创新作文(小学版)(2016年16期)2016-11-11
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
