磁强计式数控消磁系统电流控制技术
2013-08-26 02:46:46张朝阳
舰船科学技术 2013年10期
衣 军,张朝阳
(中国人民解放军91872部队,上海 200083)
0 引言
在舰船磁性防护中,舰船磁性一般分为固定磁性和感应磁性[1],固定磁性一般变化较小且不随舰船姿态变化,可以在消磁场站进行磁性处理[2],而感应磁性则随舰船航向和姿态变化,必须利用安装在舰船上的消磁系统[3]进行补偿。消磁电流控制仪是舰船消磁系统的重要组成部分,它根据作用在舰船上的地球磁场,实时地向消磁电源提供消磁电流控制信号、显示消磁绕组中的电流和消磁系统工作状态,并进行不同的工况转换。消磁电流控制仪一般可分为罗经式消磁电流控制仪、磁强计式消磁电流控制仪和地磁解算式消磁电流控制仪。罗经式消磁电流控制仪无法根据舰船姿态变化对消磁电流进行调整,目前应用较少;地磁解算式消磁电流控制仪比较先进[4],但不能对变化的地磁场和局部异常地磁场作出反应;目前应用最多的是磁强计式消磁电流控制仪。
对于磁强计式消磁电流控制仪 (如XC-4D型、XC-4(89)型等),由于磁探头安装位置的限制,使得磁探测器在接收地球磁场的同时,还将接收包括船体磁场、绕组磁场等干扰量,直接影响了消磁系统的电流控制精度,因此需要对此类仪器进行抗干扰调整[5]。由于需要专用设备和专业技术人员,并且过程复杂,抗干扰调整工作实施难度较大,为此相关部门对此类仪器的控制和调整技术进行了改进[6],研制了4DJ型消磁电流控制仪,即所谓“磁强计式数控消磁系统”,实现了由普通技术人员对仪器进行快速测量操作、仪器自动进行地磁分量解算和电流控制参数调整,在舰船平稳航行在同一纬度区的情况下,较好地改善了舰船的消磁质量。但是,舰船在实际航行过程中,要求其一直处于平稳航行状态是很困难的,并且经常要跨纬度区航行,因此必须对磁强计式消磁系统的电流控制技术进行改进,使之能实现对舰船在任意地区、任意状态下磁探测器所接收的干扰磁场进行测量和分离,改善消磁电流的控制精度,切实提高舰船的磁性防护能力。
1 磁强计式数控消磁系统控制模型
磁强计式数控消磁系统的原理框图如图1所示。对比传统的三分量磁强计式消磁电流控制仪原理框图 (如XC-4D),可以发现该系统在硬件设计上作了一些重要改进,例如:增加了测量磁场的显示功能,去掉了磁探测器处的主反馈,去掉了交叉反馈和固定补偿等。
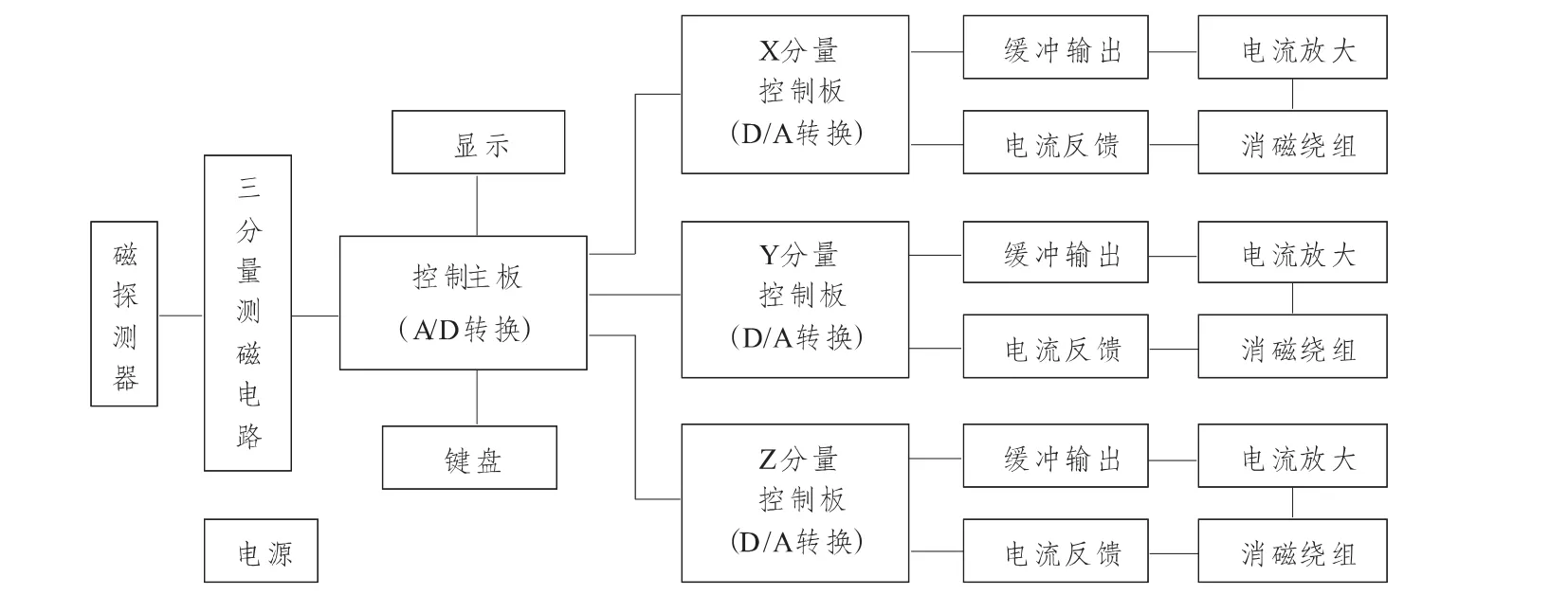
图1 磁强计式数控消磁系统原理框图Fig.1 The principle diagram of the magnetometer numerical control degaussing system
在任意地区、任意状态下,地磁场在舰船坐标系下的三分量HX,HY,HZ为:

式中:φ,θ,φ分别为舰船的纵倾、横摇和航向角;HD和ZD分别为地磁水平与垂向分量。
如将舰船坐标系与地理坐标系的转换矩阵记为A,则有:
根据图1所示,对于磁强计式数控消磁系统,在任意状态下,安装在舰船桅杆上的磁探头所接收到的磁场为[7]:
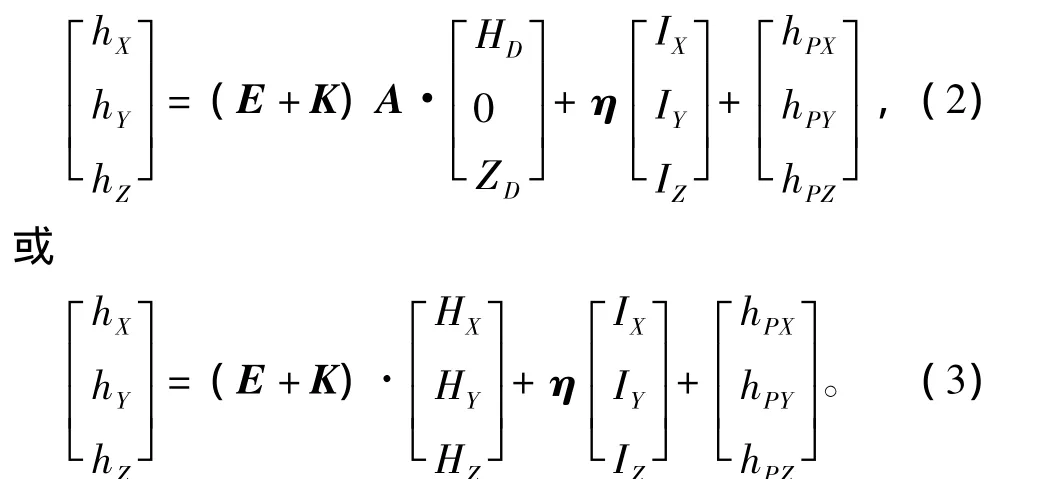
式中:E为单位矩阵;K为感应磁化系数矩阵;η为消磁绕组反馈矩阵;IX,IY,IZ为消磁电流;hPX,hPY,hPZ为固定干扰量。
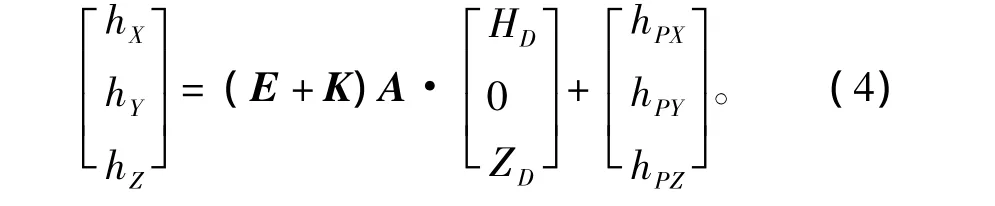
作为特例,在所有消磁绕组开路的情况下,式(2)可写成:
在没有干扰量的情况下,消磁电流(IX,IY,IZ)与地磁分量(HX,HY,HZ)的关系函数为
式中B为系统设计常数:
代入式(3),整理后得到:
式(7)即为磁强计式数控消磁系统电流控制模型。η,K及(hPX,hPY,hPZ)为常数矩阵,可在系统校准期间测量获得。
2 干扰量 (常数矩阵)的测量计算
2.1 矩阵K与固定干扰量hPX,hPY,hPZ的测量与计算
在舰船没有纵倾和横摇运动(φ=0°,θ=0°)、消磁绕组断开情况下,在4个主航向进行磁场测量[8],并依据式(4),可得到式(8)~式(11)。
北航向(φ =0°,θ=0°,φ =0°)时,磁场分量(hX,hY,hZ)的测量值为
东航向(φ =0°,θ=0°,φ =90°)时,磁场分量(hX,hY,hZ)的测量值为

南航向(φ =0°,θ=0°,φ =180°)时,磁场分量(hX,hY,hZ)的测量值为
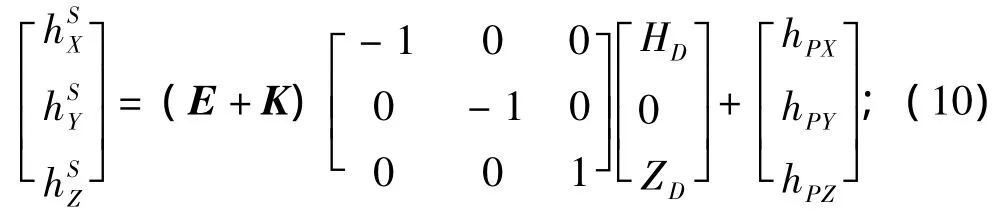
西航向(φ =0°,θ=0°,φ =270°)时,磁场分量(hX,hY,hZ)的测量值为
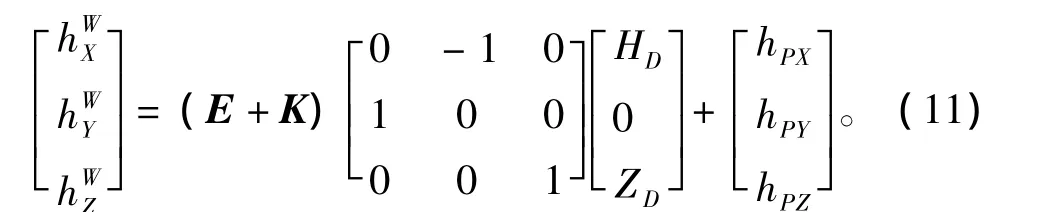
在东航向上,对舰船进行角度为+θ1,-θ1横摇运动 (无纵倾,消磁绕组断开),测量舰船磁场,可以得到式(12)和式(13)。
摇摆角为+θ1时,磁场分量(hX,hY,hZ)测量值为
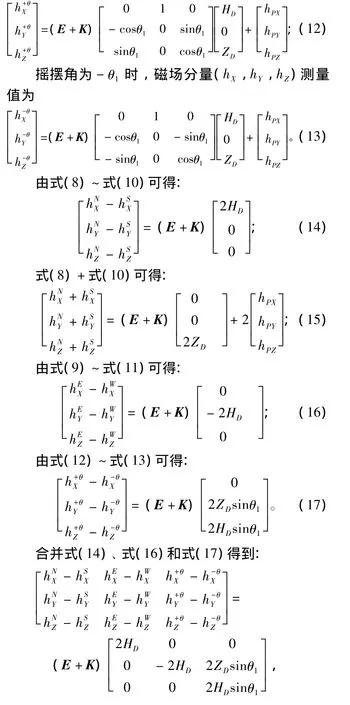
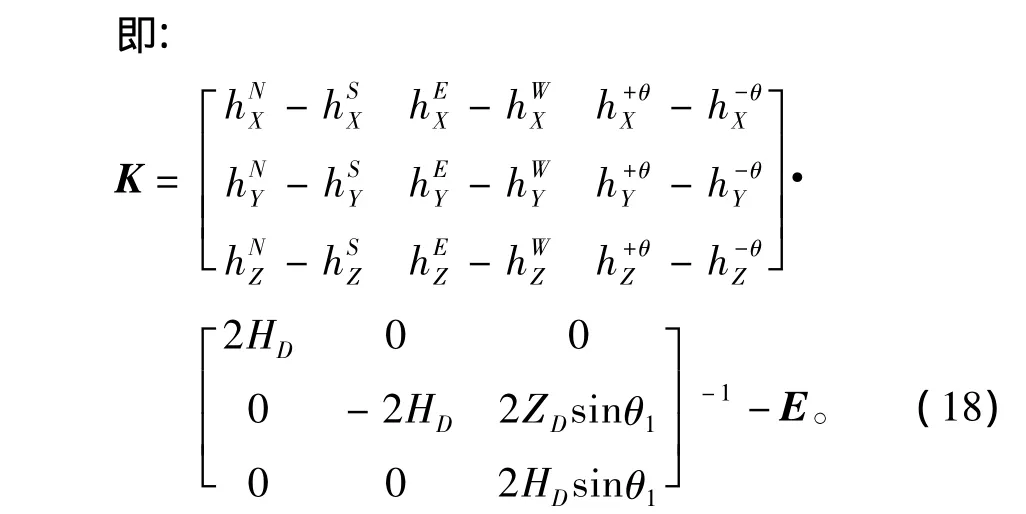
求出矩阵K之后,由式(15)可得到固定干扰量计算公式:
2.2 矩阵η的测量与计算
保持舰船处于无摇摆运动状态,在一固定航向上,通过对不同绕组进行通断电,测量其相应状态下的磁场值,可计算得到η,具体步骤如下:
首先,断开3个消磁绕组,测量舰船初始磁场值,并由式(3)可得
其次,将X分量绕组通以电流I1;Y和Z分量绕组保持断开状态,测量舰船磁场值,得到:
然后,将Y分量绕组通以电流I2;X和Z分量为断开状态,测量舰船磁场值,得到:
最后,对Z分量绕组通以电流I3;X和Y分量为断开状态,测量舰船磁场值,得到:
合并式(20)、式(21)和式(22),整理后得到:
3 结语
在测量、计算得到了舰船的感应磁化系数矩阵K、消磁绕组反馈矩阵η和固定干扰量,并已知测量地的地磁分量HD,ZD和系统设计常数矩阵B的情况下,利用本文所提出的消磁电流控制模型可以实现对舰船在任何地理位置、任意状态下消磁电流的精确控制,克服了4DJ型仪器对舰船航行姿态及舰船航行到新的纬度区需要对仪器进行校准的限制,降低了舰载消磁设备的维护、使用技术要求,对切实提高舰船的磁性防护能力具有重要的意义。
[1]HOLMES J J.Reduction of a ship's magnetic field signatures[M].Maryland:Morgan & Claypool Publishers,2008.
[2]张连魁.舰船磁场分析、临时线圈消磁[M].武汉:海军工程大学,1991.
[3]张国友.舰船消磁系统[M].武汉:海军工程大学,1994.
[4]刘大明,何明,刘胜道.基于地磁模式组的舰船消磁电流调整器[J].海军工程大学学报,2001,13(4):18 -21.
[5]肖昌汉.舰船磁性防护系统及其抗干扰调整方法[D].武汉:华中理工大学,1998.
[6]吴乌明.磁强计型消磁电流调整器改进研究[J].水中兵器,2004(1):37-41.
[7]肖昌汉,卢庆芳,王智勇.舰船任意姿态下消磁系统电流变化关系[J].海军工程大学学报,2002,14(1):14-18.
[8]闫辉,肖昌汉.一种海洋环境地磁场三分量测量方法[J].海军工程大学学报,2005,17(6):80 -83.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
西北工业大学学报(2022年2期)2022-05-11 07:51:28
舰船科学技术(2021年12期)2021-03-29 01:28:44
空间科学学报(2020年4期)2020-04-22 01:17:10
燕山大学学报(2020年1期)2020-03-12 10:01:08
军事文摘(2019年13期)2019-07-12 08:12:42
传感器与微系统(2018年7期)2018-08-29 00:44:20
船电技术(2016年1期)2016-03-25 10:14:29
舰船科学技术(2016年1期)2016-02-27 15:39:26
工业炉(2016年1期)2016-02-27 12:34:09