汽车客运站出入口监控系统中行人检测与跟踪方法
2013-08-23 10:46李熙莹
计算机与现代化 2013年8期
李熙莹,卢 林,陈 玲
(中山大学智能交通研究中心,广东 广州 510006)
0 引言
汽车运输是目前我国旅客出行的主要交通方式之一,客运站作为公路与旅客接口的重要地点,对其进行全方位实时监控是保障旅客人身财产安全、维护社会稳定的重要手段。然而传统的视频监控方式主要依靠人工,这样很难全面实时监控,而且报警响应时间长,误报和漏报率高[1]。
鉴于此,在客运站实施智能监控则成为必然的趋势。智能监控是基于计算机视觉技术对监控场景的视频图像内容进行分析,可实现入侵检测、逗留检测、遗留物监测、逆行检测、人群密度检测、异常行为检测、队列长度检测等功能[2]。在汽车客运站的监控系统中,感兴趣的一般是人以及人的行为。通过计算机进行行人检测与跟踪的方法获取的信息有着重要的意义。实时可靠的行人检测与跟踪方法在汽车客运站有着多方面的用途,比如客流量的统计、行为分析以及危险预警等。近年来,各种行人检测与跟踪算法相继被提出。Munder等融合行人的点分布形状模型和纹理特征建立了行人识别分类器,采用基于粒子滤波的贝叶斯方法实现行人的跟踪[3]。德国 Enzweiler等分别针对统计学习中的小波特征线性支持向量机以及神经网络的方法进行比较分析,通过设计不同尺度的分类器来检测图像中的行人[4]。清华大学的江帆等提出一种基于模型融合的行人跟踪算法,结合离线学习和在线互学习对模型进行更新[5]。中国科学技术大学程有龙等将行人检测的先验知识融入到跟踪模型自学习过程中,对被跟踪行人进行动态建模,从而实现在真实监控场合下跟踪具有复杂运动的行人[6]。这些方法要求较大的计算量和计算参数,很难满足汽车客运站视频监控系统实时性要求。
鉴于此,本文提出一种在摄像机静止情况下的行人检测与跟踪方法。首先利用视频图像处理技术实现背景提取、移动行人检测,并对多人融合的情况下进行行人分割;然后结合卡尔曼滤波原理跟踪行人,并输出其运动轨迹。
1 运动行人的检测与分割
1.1 运动行人检测
在汽车客运站出入口视频监控系统中,摄像机一般都是静止的。在摄像头静止情况下,背景帧差法速度快,检测准确是检测运动目标的有效方法[7]。背景帧差法基本思想是将视频流中当前一帧所有像素点与事先通过某种方法计算得到的背景图像中对应像素点相减并取绝对值,如果绝对值超过某个预先设定好的阈值,则认为当前帧中对应的像素点是运动目标的像素点;否则,认为对应的像素点是背景像素点。本文采用图像均值法获取背景图像。通过对输入序列的若干帧图像求平均值,可以得到与实际背景近似的初始背景,同时达到过滤随机噪声的目的。均值背景表达式:

其中,i为图像序列号,(x,y)为图像位置坐标,f(x,y,i)为第i帧输入图像,b(x,y,i)为第 i帧时的背景图像。理论上,在获得背景后,将当前帧图像与背景图作差分,当差值大于一定阈值T时,则判断为运动目标。本文采用Otsu法自动确定阈值T,该方法简单、处理速度快。

1和0的像素分别对应于前景(运动目标区域)和背景(非运动区域)。得到运动前景目标后,对二值图进行形态学处理,可以得到行人较为清晰和完整的轮廓,从而可以检测出运动的行人。一般来说,选取检测运动行人的高度的1/5来作为行人头部来代替行人。
图1是行人检测算法的结果图。首先,将获取到的背景图像进行灰度化,即图1(a);当前帧图像与背景图像差分后的结果如图1(b)所示;形态学去除噪声前景点和填充目标区域的小孔得到图1(c);最后用矩形框将运动行人头部框出来做为行人检测的结果,即图1(d)。

图1 运动行人检测结果
1.2 多人分割
由于在汽车客运站出入口场景中,经常会出现多人并排或者相向行走的情况,因此对检测到的运动行人要进行单人与多人的判别,如果是多人的情况,则需要对行人进行多人分割。鉴于汽车客运站出入口比较窄,一般只考虑两人的分割。一般来说,提取到的运动行人的宽度L≥60,则认为是多人,强制将其平分为两人;如宽度小于<60,则认为单人,无需分割。多人分割流程见图2。

图2 多人分割流程
图3为多人分割算法的效果图。图3(a)中的长矩形框代表检测到的多个行人,图3(b)则是对多个行人进行分割后的结果图。可以清楚地看出,对于多人融合情况下的分割结果较好。

图3 多人分割结果
2 行人跟踪
卡尔曼滤波器是一种在时域内采用递归滤波方法对系统状态进行最小均方误差估计的方法,具有计算量小,可实时处理的特点,利用卡尔曼滤波器实现对目标轨迹的估计和预测是非常有效的[8-10]。同一目标在相邻两帧中运动位置特征变化相对较小,因此进行相邻帧间的目标匹配。通过跟踪可以获得目标行人在相邻帧之间的关联,达到对目标运动状态的判断,实现连续跟踪行人[11]。根据目标识别所得到的关于目标行人的位置特征,将当前帧中行人的位置特征作为已知目标对下一帧中所有位置特征进行匹配[12]。
2.1 预测
由于行人的运动速度较慢,相邻2帧图像之间的时间间隔较短,可假设行人在单位时间间隔内做匀速运动。根据卡尔曼滤波原理,系统的状态方程和观测方程分别为[6]:
状态方程:

观测方程:

其中,xt为t时刻n维状态向量;zk为t时刻n维测量向量;A、H分别为状态转移矩阵和测量矩阵;wt、vt是2个随机变量,分别为正态分布的状态和测量噪声向量。
定义 卡尔曼滤波的状态向量xt是一个二维向量(px,py),即目标位置(px,py)。由于假设行人在单位时间间隔内做匀速运动,状态转移矩阵A可以定义为[13]:

图4 卡尔曼滤波行人跟踪结果
根据状态方程和观测方程的关系,可以得到观测矩阵 H 为[14]:
2.2 匹配
利用卡尔曼滤波预测运动目标在下一帧中的位置坐标,计算预测的位置坐标与此帧的位置坐标的直线距离d,如果d<20,则认为此目标与上一帧的目标是同一目标,记录此目标点的轨迹。图4为采取卡尔曼滤波跟踪的结果。其中,*为实际轨迹点,+为预测点轨迹点。从图4中可以清楚地看出行人的检测轨迹点与跟踪轨迹点吻合较好,算法能够较好地预测行人运动。
3 实验结果与分析
测试视频是汽车客运站出入口用固定摄像机拍摄的2组视频图像,视频图像帧的大小为320×240,AVI格式。其中视频1是在行人较多的时候拍摄的,时长5分钟,运动行人462人;视频2是在行人较少的时候拍摄的,时长5分钟,运动行人205人。用Matlab软件仿真本文提出的行人检测与跟踪算法。检测与跟踪的结果如表1和表2所示。
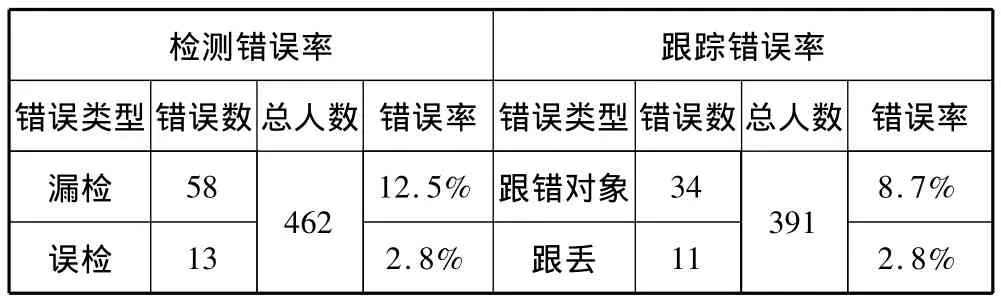
表1 行人较多情况下检测与跟踪结果
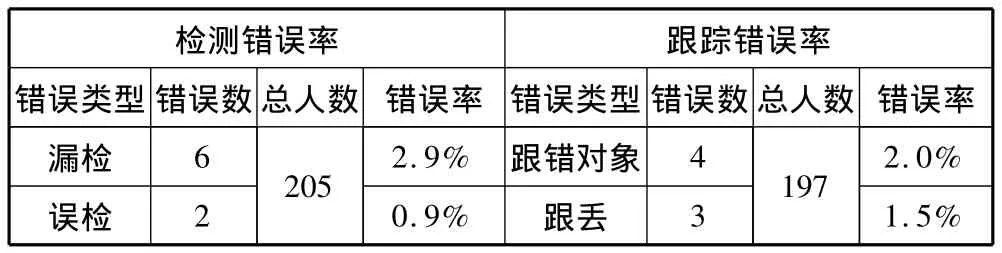
表2 行人较少情况下检测与跟踪结果
从表1可以看出,在行人较多的时候,行人检测准确率能达到将近85%,而跟踪准确率达到88.5%;在人少的情况下,行人检测准确率能达到96.2%,而跟踪准确率达到96.5%。由此可见,该方法具有较好的鲁棒性。
4 结束语
针对汽车客运站出入口的行人检测与跟踪问题,本文提出了一种运动行人检测和跟踪方法。实验结果表明,该方法可以很好地检测行人和分割多个行人,并且能清楚地绘出行人的运动轨迹。但是,本研究工作还存在一定的不足,考虑的因素还不全面,比如光照因素,虽然在汽车客运站光照影响不大,但是忽略光照会影响算法的准确性。笔者下一步研究在傍晚或夜间条件下的汽车客运站出入口的行人检测与跟踪。
[1]郝菲.智能监控系统中运动目标检测跟踪的研究[D].北京:北京交通大学,2009.
[2]王冰,康增建,吕晓军.铁路客运站视频监控系统中的行人逆行异常事件检测算法研究[J].铁路计算机应用,2012,21(4):19-22.
[3]Munder S,Schnorr C,Gavrila D M.Pedestrian detection and tracking using a mixture of view-based shape-texture models[J].IEEE Transactions on Intelligent Transportation Systerms,2008,9(2):333-343.
[4]Enzweiler M,Gavrila D M.Monocular pedestrian detection:survey and experiments[J].IEEE Transactions on Pattern A-nalysis and Machine Intelligence,2009,31(12):2179-2195.
[5]江帆,王贵锦,刘畅,等.一种基于模型融合的行人跟踪算法[J].视频应用与工程,2010,34(3):85-87.
[6]程有龙,李斌,张文聪,等.融合先验知识的自适应行人跟踪算法[J].模式识别与人工智能,2009,22(5):704-708.
[7]Zha Yufei,Bi Duyan.Adaptive learning algorithm based on mixture Gaussian background[J].Journal of Systems Engineering and Electronics,2007,18(2):3692-3761.
[8]张贝贝,肖国强,江健民.基于运功估计的卡尔曼滤波视频对象跟踪[J].计算机应用,2008,28(8):2052-2054.
[9]赵其杰,屠大维,高健.基于卡尔曼滤波的视觉预测目标跟踪及其应用[J].光学精密工程,2008,16(5):937-942.
[10]李书进,李文华.基于自适应卡尔曼滤波的时变结构参数估计[J].广西大学学报:自然科学版,2004,29(2):146-148.
[11]姚亚夫,刘佰昂.基于位置特征的运动行人检测与跟踪方法[J].广西大学学报:自然科学版,2009,34(6).769-773.
[12]Osama M,Nikolaos P P.A novel method for tracking and counting pedestrians in real-time using a single camera[J].IEEE Transactions on Vehicles Technology,2001,50(5):1267-1278.
[13]巨朋真.基于头肩特征的人体目标检测与跟踪[D].大连:大连海事大学,2008.
[14]王飞杰.基于头肩特征的人体实时检测与跟踪[D].长春:吉林大学,2010.
猜你喜欢
意林(2021年5期)2021-04-18
工程与建设(2019年3期)2019-10-10
扬子江(2019年1期)2019-03-08
减速顶与调速技术(2018年4期)2018-08-27
北京航空航天大学学报(2017年9期)2017-12-18
小天使·一年级语数英综合(2017年6期)2017-06-07
广东石油化工学院学报(2016年6期)2016-05-17
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
中国交通信息化(2014年2期)2014-06-05