
道路交通驾驶行为研究进展及其展望*
2013-08-21 08:12严新平吴超仲
交通信息与安全 2013年1期
严新平 张 晖 吴超仲 毛 喆 雷 虎
(1.武汉理工大学智能交通系统研究中心 武汉430063;
2.水路公路交通安全控制与装备教育部工程研究中心 武汉430063)
0 引 言
2009年,全国共发生道路交通事故238 351起,造成67 759人死亡、275 125人受伤,发生1次死亡3人以上道路交通事故1 276起,同比减少14起;发生1次死亡5人以上道路交通事故261起,同比增加11起;发生1次死亡10人以上特大道路交通事故24起,同比减少5起[1]。对我国2001~2009年1次死亡3人以上特大交通事故分析表明,因驾驶人原因导致的交通事故占到90%以上;国外研究表明,由驾驶人因素直接导致的交通事故约占65%,而与驾驶人因素相关的事故约占95%。驾驶人不仅是道路交通系统的信息处理者、决策者,也是调节者和控制者,其驾驶行为直接影响道路交通安全水平,与否对于整个系统的状态有密切关系。
国内外针对驾驶行为与交通事故的关联性展开了大量研究,如英国皇家事故预防协会(The Royal Society for the Prevention of Accidents:RoSPA)的研究表明:由于疲劳驾驶行为导致的重大交通事故数占到了20%[2];美国公路运输安全管理局(National Highway Traffic Safety Administration:NHTSA)对2009年全国发生的统计数据进行研究,发现由于酒后驾驶行为导致的死亡人数为10 839占到了交通事故总死亡人数的32%[3];澳大利亚MONASH大学事故研究中心的研究报告指出,有25%的道路交通事故由驾驶分神原因导致[4]。武汉理工大学针对大客车的事故行为特点,有针对性的开展了长途客车不良驾驶行为识别的研究[5]。我国2010年1月26日在中央文明办、公安部联合电视电话会议上,提出在全国范围内实施部署为期3年(2010~2012年)的文明交通行动计划,其中重点提出需要防范6大类危险驾驶行为:酒后驾驶、超速行驶、疲劳驾驶、闯红灯、强行超车以及超员/超载,旨在减少交通事故。
因此,对驾驶人行为的研究,已成为各国道路交通安全研究的核心内容[6],本文首先对驾驶行为涵义及过程进行描述,确定能够表征驾驶行为的具体指标,进而分析不同条件下驾驶行为指标的变化特征及规律,最终结合目前的研究进展和成果,提出驾驶行为研究的主要方向和趋势。
1 驾驶行为涵义和表征
1.1 驾驶行为涵义
驾驶行为研究按照研究角度和内容的不同可分为宏观和微观2大类。
宏观驾驶行为是从影响安全的行为产生原因、诱发结果等方面开展的研究,如疲劳、酒后、分神以及超速等行为,主要研究内容包括影响驾驶人安全的行为特征,从宏观角度分析各种驾驶行为的产生原因、表征宏观驾驶行为的指标、对具体操作的影响机理等方面;研究成果可为制定事故预防对策和提升驾驶安全提供依据。
微观驾驶行为是指驾驶人在各种生理状态下的具体操作表现,如:换道、超车、跟驰行为等,主要研究内容包括各种条件下的换道、超车等微观行为特征及其对交通系统效率的影响;研究成果可用于改善道路交通系统路网结构、优化管控系统设置参数及提升道路通行效率。
本文的研究主要从安全角度综述现有驾驶行为研究的进展及已经取得的成果,结合目前科技发展方向,提出驾驶行为研究的趋势。
1.2 驾驶行为表征方法
驾驶人的行车过程可以按照信息处理及加工分为3个主要阶段,见图1。

图1 驾驶过程信息处理、加工及反馈阶段Fig.1 The procedure of driving information processing
阶段一:信息感知、处理。
阶段二:信息决策和驾驶操作。
阶段三:车辆运行及信息反馈。
为了研究驾驶操作的3个主要阶段的行为变化特征,交通领域的学者根据各阶段的特点,提出了驾驶行为表征指标,在第1个阶段:主要确定了用于表征驾驶人获取道路和其他车辆运行信息的特点,主要从视觉方面建立了表征指标;在第2个阶段:主要建立了描述驾驶人对各种信息的认知态度和反应能力的指标;第3个阶段是具体标线出来的操作动作和车辆运动特征,是驾驶行为的具体表现,也是驾驶行为定量研究的重要方向。
2 驾驶行为研究进展
面向交通安全的驾驶行为研究主要集中在几种典型行为的安全性影响,具体包括疲劳驾驶、分神驾驶、酒后驾驶以及愤怒及攻击性驾驶等内容。本节将分别就2种驾驶行为的涵义、产生原因以及对驾驶安全性的影响等对目前驾驶行为研究进展进行阐述。
2.1 主要研究内容
2.1.1 疲劳驾驶行为
产生原因。疲劳驾驶行为主要是指由于长时间行驶、大量工作、认知负荷或其他原因,导致驾驶人在反应、认知能力出现下降条件下的驾驶行为。疲劳驾驶行为产生的原因很多,主要集中在以下3个方面,见表1。

表1 疲劳驾驶行为产生原因及描述Tab.1 Description of fatigue driving reason
当驾驶人由于上述原因产生驾驶疲劳时,其认知感知过程和决策行为上都出现了一定的变化,具体体现在驾驶人生理特征和车辆操作和运动特征方面,本文主要介绍了疲劳驾驶行为脑电和转向盘控制能力方面的变化特征。
脑电信号(electroencephalogram:EEG)在心理学和临床医学中的应用十分广泛,主要关注对象是频率在0.3~70Hz之间,电压约为100 μV的脑电信号。不同频率的脑电信号与人们认知心理和状态之间的对应关系,见表2。

表2 不同频率脑电信号所对应的生理特征表Tab.2 The relationship between EEG signal and physiological feature
科学家不断尝试研究,不同波长的脑电频率与驾驶人疲劳程度之间耦合关系,通过大量实验,1977年O’Hanlon和 Beatty[7]提出了随着驾驶人警觉性的不断下降,驾驶疲劳程度的不断增加,驾驶人脑电信号中的α波在整个脑电波中的出现概率明显增加,β波则出现了明显下降;Torsvall and Akerstedt[8]通过对11位驾驶人连续驾驶4.5h的脑电进行观察,根据驾驶人的主观疲劳程度评价结果,将被试分成了疲劳和清醒2组,结果表明疲劳组驾驶人在α波(8~12Hz)和θ(4~8 Hz)出现了显著增加;同时de Waard和Brookhuis[9]等人提出了(θ+α)/β比值与驾驶人疲劳程度之间的相关性。
脑电行为与疲劳程度之间的相关性程度较高,已经成为了用于标定驾驶人疲劳程度的重要指标,驾驶人疲劳程度进行定量标定的结果,可以作为研究其他疲劳行为的重要依据。
车辆运动方向控制能力是指驾驶人根据道路线形信息,控制车辆在车辆中间平稳驾驶的能力。当驾驶人随着工作时长的增加,对于车辆的控制能力会出现一定程度的下降,由于车辆运动方向控制能力与车辆运动方位和姿态直接相关,其结果直接与交通风险存在很强的关联性,因此成为研究驾驶疲劳的1个热点。
关于转向能力变化特征的1个作为重要的指标是Macdonald和Hoffmann[10]提出的转向盘逆转率(steering wheel reversal rate,SRR)。转向盘逆转率是指在单位时间内,驾驶人转向盘在一定角度范围内,出现方向逆转的次数,一般将转向盘的角度范围定义为0.5°~10°。大量的疲劳驾驶实验的数据分析结果表明,当驾驶人处于清醒状态时,驾驶人的车辆转向控制能力能够保证其变化较为灵敏和缓和,而当驾驶人疲劳时,驾驶人的操作会出现僵硬和突变,转向盘转角变化也会变得急剧。图2是对清醒和疲劳状态下前轮转角变化特征的示意图。
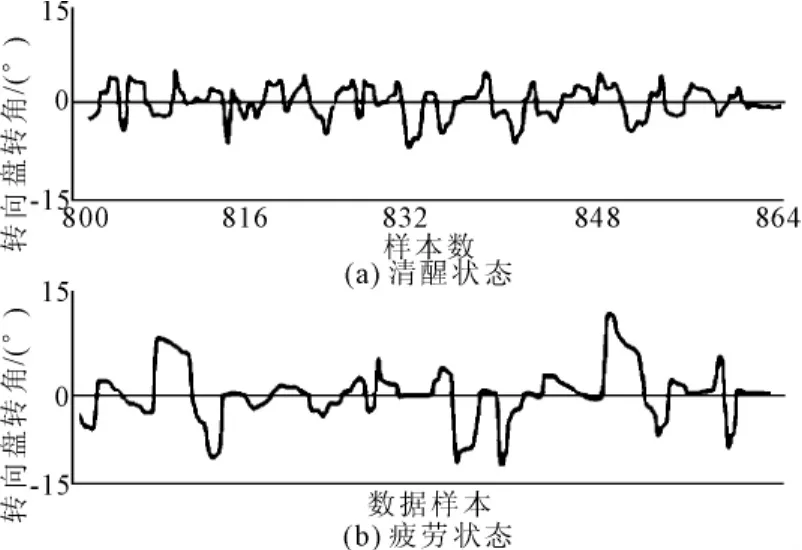
图2 清醒与疲劳状态下车辆转向盘转角变化特征示意图Fig.2 The steering signal of alert and drowsy driver state
车辆运动方向控制能力的研究中,除了直接研究驾驶人前轮转向角度之外,还有另一类是研究驾驶人车道偏离的频率。Bishel在1998年利用图形算法开始研究车辆偏离横向位置以及超出车 道 边 缘 标 线 的 次 数 (time-to-line-crossing,TLC),用于分析驾驶行为特征,相关学者利用该方法研究驾驶人疲劳程度等级与驾驶人横向控制能力和偏移之间的关联性,示例见图3[11]。
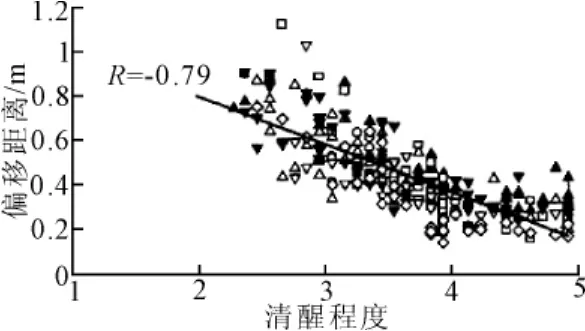
图3 驾驶疲劳程度等级与横向偏移关系示意图Fig.3 The lateral deviation of lane position under different fatigue level
驾驶人清醒程度,1-驾驶人十分疲惫;5-驾驶人十分清醒,1~5表明驾驶人清醒程度逐渐增强。
2.1.2 愤怒及攻击性驾驶行为
针对愤怒和攻击性驾驶行为的研究主要集中在:该驾驶行为的诱发因素及车辆操作特征和运动表现,常用的分析方法是利用问卷调查的方法进行研究。
攻击性驾驶系列量表主要用于测试两方面的内容。
第一部分是针对驾驶人是否具有驾驶报复心理和暴力驾驶倾向:包括驾驶报复问卷,自测驾驶行为量表,暴力性驾驶问卷,用于直接评价攻击性驾驶行为;
第二部分包含驾驶愤怒量表、驾驶紧张量表,用于评价攻击性驾驶员的心理特征。这一系列问卷建立在情绪攻击模型的基础上,体现了攻击性驾驶是有意识地对驾驶环境中他人进行身体、心理或情感伤害的驾驶行为,强调 了情绪唤起在攻击性行为发生中的作用。
2.2 主要研究方法和实验手段
2.2.1 研究方法
驾驶行为研究和其他科学实验的过程一致,应当首先明确实验目的,确定实验过程中的具体分析对象和要求,确定实验方案,采集并分析各种指标,最终得到所需要的结论,但驾驶行为研究由于需要考虑的对象较为复杂,同时又有驾驶人因素的影响,因此,已经逐渐形成了一种具有鲜明特征的研究方法,具体表现为变量确定和实验类型设计。
步骤一。确定实验研究变量。无论是哪种驾驶行为实验,至少在研究过程中需要确定2种指标:①因变量(如事故严重程度、行为特征等);②自变量(能够影响驾驶行为或事故严重程度等内容的指标)。但具体到不同类型的驾驶行为,有可能会引入更多的参数和变量,这些参数和变量的作用见图4,以疲劳驾驶为例对每种变量的涵义进行了解释。

图4 驾驶行为研究各变量关系图Fig.4 Variable design for driving behavior research
1)自变量和因变量。大部分驾驶行为的研究都是某个或某些变量的变化对其他变量的影响。一般将对其他变量带来影响的变量称为自变量;因此这些变量需要能够根据实验的要求由实验人员进行控制。由于自变量的变化造成影响的变量称之为因变量。以疲劳驾驶为例,研究主要集中在驾驶疲劳程度与交通事故之间的关系方面,驾驶疲劳程度则是自变量,交通事故会随着疲劳程度的增加会发生变化,则被认为是因变量。
2)控制变量。驾驶行为研究过程中为了减少实验结果受到其他因素带来的影响,需要对这些因素进行控制,尽量保持在自变量变化前后,这些变量保持一致,这些变量则被称之为控制变量,如疲劳驾驶行为研究中实验道路路段应当保持一致,所采用的实验车辆应当一致,驾驶人被试年龄、驾龄和性别等应当相同或接近,这些变量的改变有可能影响疲劳程度和交通事故之间的关联性,因此需要进行控制。
3)中间变量。当自变量与因变量之间的关系不是很明确,很难通过实验研究,直接建立两者之间的关联性时,需要引进一种变量作为中间桥梁,该变量被称之为中间变量。如疲劳状态与交通事故之间不存在直接的联系,当驾驶人疲劳或瞌睡时,其驾驶操作行为和感知能力出现了下降,这些能力的下降导致车辆之间发生了碰撞,造成交通事故,则驾驶操作行为和感知能力这些变量被认为是疲劳程度与交通事故关系研究中的中间变量。
4)干扰变量。当对自变量的变化进行控制时,会造成某些变量会随着自变量的变化而变化,无法控制其所产生的干扰,这些变量在某种意义上被称为干扰变量。如进行疲劳研究时,需要综合考虑多种道路线形,但道路线形会对车辆运动的分析结果会造成一定的影响,因此道路线形会成为一种干扰变量,需要通过数学方法,消除这种干扰。
步骤二。实验类型设计。
1)实验研究和观察研究。实验研究是根据研究的目的,有针对性的通过设计实验,确定各种变量,进而获取实验数据进行分析的一种研究方法;观察研究是针对研究目标,对实际道路上的交通信息进行采集,通过获取这些信息后再进行分析的1种研究方法。实验研究能够减少干扰变量的影响,使分析过程和数据采集过程更有针对性,但于观察研究相比,所需要研究的实验数据有可能在实验控制条件下,与真实情况的对比有一定的差异。
2)被试间和被试内对比实验研究。被试间对比研究是指不同的被试分别在自变量取不同等级参数时进行的实验研究;被试内对比研究是指同1个被试在自变量取不同等级参数时分别进行的实验研究;两者的区别在于:前1种实验研究是将自变量的不同安排在了不同的被试个体上,可以同时开展实验,避免了实验顺序的影响,消除了被试在了解实验目的之后,后几次实验出现干扰的可能性;但和第2种实验研究相比,存在的最大问题是个体之间的差异不能有效消除。
2.2.2 实验手段
手段一。驾驶模拟实验。是指通过计算机仿真和虚拟现实技术,将交通场景投影在车辆前方,通过采集车辆运动踏板的信息,驱动虚拟车辆在虚拟场景中运动的实验方法,最大的优点是能够保证实验的安全性;通过三维建模技术快速改变实验场景要素的特征,满足不同实验的需求。环境感知实验(peripheral detection task,PDT)、换道实验(lane-change test,LCT)是2种常见的驾驶模拟实验手段。
环境感知实验(peripheral detection task,PDT)是1种在行车过程中,考察驾驶人对周边环境信息感知和观察能力的实验手段。周边环境信息主要包括周边静态交通标志信息和场景中不断触发的动态交通信息:如行人横穿马路等行为。PDT实验的目的是研究驾驶人视觉分布特征和观测能力的变化规律,主要用于研究驾驶分神等研究。
换道实验(lane-change test,LCT)是1种让驾驶人根据要求进行车辆变更车道的实验手段。主要通过屏幕上出现文字或标志信息或发布指令,提示驾驶人变更行驶的车道,模拟在多车辆环境中的驾驶过程。LCT的实验目的是研究驾驶人对于车辆横向控制和车道保持和变更能力,主要用于研究疲劳和酒后驾驶对车辆操作和运动行为的影响。
手段二。问卷调查及量表。问卷调查和量表都是通过驾驶人主观描述或评价其生理状态,或对某行为认知进行的研究重要手段。从驾驶人的角度对某些不易于通过客观指标进行采集和获取的变量,进行信息获取的方法。但问卷调查主要采用多条目的形式,给驾驶人某个题干,让驾驶人进行选择或用文字进行反馈,而量表是给出某个条目,让驾驶人在多级选项中进行选择。驾驶行为问卷调查表,疲劳程度主观评价量表以及驾驶负荷量表是几种典型的驾驶行为主观研究方法。
Reason等人提出了1种驾驶行为调查表[12],该问卷包含了50个错误或违法驾驶行为的描述,要求驾驶人本人反馈过去1年上述每种驾驶行为发生的概率(5级选项,从基本没有出现过到经常出现),调查结果可以用于分析驾驶人发生错误和违法行为的特征,该问卷的前期分析表明:错误和违法行为之间存在显著的差异,两者是由不同的生理机制进行控制,其中错误能够反映驾驶人在感知、注意力以及信息处理能力方面存在的特征。违法行为调查结果能够反映驾驶习惯和驾驶风格方面的特征。
疲劳驾驶量表:目前常见的几种主观疲劳程度量表包括:Hoddes等人提出的stanford sleepiness scale,(SSS[13]),Johns等人提出的epworth sleepiness scale,(ESS[14])以及 Gillberg等人提出的 KSS[15](karolinska sleepiness scale),这些问卷都是用于获取驾驶人疲劳程度主观评价信息。
Horne和 Reyner[16]对 KSS量表进行了修订,采用9级形式采集疲劳程度信息,见表3。
工作负荷量表:NASA-TLX (task load in-dex)[17],是由美国宇航局提出的用于评价宇航员工作负荷的重要手段,是迄今使用最为广泛的主观心理负荷评估工具之一,不仅使用者接受程度最高,且被试间变异最小。NASA-TLX量表试图从认知负荷、体力负荷、时间要求、绩效水平、努力程度和挫折程度等6个维度对总体的心理负荷程度进行评定,是1个多维评估量表,被广泛用于诸多人类绩效研究。该量表主要用于评价不同车载产品对驾驶负荷带来的影响以及驾驶过程中信息处理负荷的分布特征研究。

表3 KSS疲劳问卷修订版调查选项Tab.3 The level description for KSS scale
3 结论与展望
由于驾驶人行为能力下降导致的交通事故成为道路安全最为紧迫的问题,给社会和人们的生活带来了巨大的负担和影响。因此,需要通过不同类型实验研究不同驾驶行为的变化特征,探索驾驶人信息处理和决策过程,发现驾驶行为受不同因素影响的演化机理,找出提升驾驶行为安全性的方法和手段。
通过对疲劳、酒后等危险驾驶行为的研究,可为有针对性的管控措施和相关监测产品的开发提供理论和技术支持,表4列出了基于不同原理的疲劳检测产品[18]。
随着虚拟现实、物联网、车辆主动安全以及脑机接口等技术的不断发展和完善,使得驾驶行为研究有了更新的手段,也面临了新的机遇和挑战。
风险感知能力被认为是影响交通安全的重要因素之一,主要指驾驶人对于潜在风险的预判能力。英国、加拿大、澳大利亚以及日本等国在最近年都相继提出了在驾驶理论考试过程中需要增加危险判断的试题,用于提升驾驶人安全风险感知能力,甚至引入了先进的模拟驾驶技术,将危险情景通过虚拟现实技术展现出来,让驾驶人进行交互操作,体验危险情景的特征,提升安全意识。我国的道路安全科技行动计划也提出了利用模拟器开展驾驶人考试和培训的要求,提升我国驾驶人在遇到危险情景和复杂交通环境时的应急处置能力。

表4 驾驶疲劳产品原理及简介Tab.4 The principle and introduction for fatigue driving detection products
物联网技术和车辆主动安全技术的发展,使得车辆之间更多的信息交互以及车外信息的获取变的可能,但驾驶人对于这些信息的认知和处理过程,以及其对驾驶行为本身带来的影响,成为现在的1个热点,目前主要集中在自适应巡航控制系统对驾驶人认知和操作行为带来的影响,随着新产品的不断应用,将会呈现更多的驾驶行为研究热点。
随着脑科学和交通、车辆之间的相互融合,使得脑机接口成为了1个驾驶行为研究的新课题,尤其是在柏林出现的人脑控制车辆进行行驶的实验,使得人脑在车辆运动控制和驾驶行为方面的应用成为了可能。
[1] 公安部交通管理局.中华人民共和国道路交通事故统计年报[R].北京:公安部交通管理局,2010.
[2] Royal society for the prevention of accidents(ROSPA).Driver fatigue and road accidents:a literature review and position paper[R].Washington,DC A-merica:Royal society for the prevention of accidents,2001.
[3] Department of transportation,national highway traffic safety administration (NHTSA)[R].Alcoholimpaired driving traffic safety fact sheet 2009,Washington,D C,America:NHTSA,2010.
[4] Young K,Renan M,Hammer M.Driver distraction:A review of the literature:Report 206[R].Monash University Accident Research Centre,Victoria,Australia,2003.
[5] 贺 宜,吴超仲,陈志军,等.长途客车事故现状及致因分析[J].交通信息与安全,2011(5):78-82.
[6] 裴玉龙,张需鹏.不良汽车驾驶行为特征分析[J].交通信息与安全,2009(3):81-84.
[7] O’Hanlon J F,Beatty J.Concurrence of electroencephalographic and Performance Changes During A Simulated Radar Watch And Some Implications for the Arousal Theory Of Vigilance[M].Mackie R R,ed,Vigilance:theory,operational performance,and physiological Correlates,13 (189-201).Plenum Press,1977.
[8] Torsvall L,Akerstedt T.Sleepiness on the Job:Continuosly measured EEG changes in Train drivers[J].Electroencephalography and Clinical Neurophysiology,1987,66(10):502-511.
[9] De Waard D,Brookhuis K A.Assessing driver status:A demonstration experiment on the road[J].Accident Analysis & Prevention,1991,23(4):297-307.
[10] Macdonald W A,Hoffmann E R.Review of relationships between steering wheel reversal rate and driving task demand[J].Human Factors,1980,22(7):733-739.
[11] Chikamori S,Shimizu Y,Othani T.Estimation of Arousal-level from Steering Operations[J].JSAE Review,2001,22(7):175-181.
[12] Reason J,Manstead A,Stradling S,et al.Errors and Violations on The Roads:A Real Distinction[J].Ergonomics,1990(33):1315-1332.
[13] Hoddes E,Dement W C,Zarcone V.The History and Use of the Stanford Sleepiness Scale[J].Psychophysiology,1972,9(2):150.
[14] Johns M W.Reliability and Factor Analysis of the Epworth Sleepiness Scale[J].Sleep,1992,15(4):376-381.
[15] Gillberg M,Kecklund G,Akerstedt T.Relations between Performance and Subjective Ratings of Sleepiness during a Night Awake[J].Sleep,1994,17(3):236-241.
[16] Home L A,Reyner L A.Sleep Related Vehicle Accidents[J].British Medical Journal.1995,310(6979):565-567.
[17] Hart S G,Staveland L E.Development of NASATLX(Task Load Index):results of empirical and theoretical research[M].Hancock P A,Meshkati N.Human Mental Workload.New York:Elsevier,1988:139-183.
[18] Edwards D,Aguirre A,Davis B,et al.Operator fatigue detection technology review[R].America:Caterpillar Inc,Adams,peoria II,2008
猜你喜欢
家庭影院技术(2021年5期)2021-07-21
意林(2021年2期)2021-02-08
公民与法治(2020年17期)2020-10-27
小雪花·成长指南(2020年2期)2020-10-12
灾害医学与救援(电子版)(2016年4期)2016-03-11
中国卫生标准管理(2015年1期)2016-01-15
心理学探新(2015年4期)2015-12-10
集美大学学报(教育科学版)(2015年5期)2015-02-28
济南大学学报(社会科学版)(2015年5期)2015-02-27
断块油气田(2014年6期)2014-03-11
