高速公路网突发交通事件时空影响预测模型*
2013-08-21 08:12:34王俊骅赵新勇丛浩哲
交通信息与安全 2013年1期
王俊骅 赵新勇 丛浩哲
(1.同济大学交通运输工程学院 上海200092;2.哈尔滨工业大学交通科学与工程学院 哈尔滨150001;3.公安部道路交通安全研究中心 北京100062)
0 引 言
高速公路网突发交通事件不仅会引发不同程度的交通拥挤,而且容易导致交通事故及二次事故的发生,是道路交通管理的主要影响因素。交通事件时空影响态势评估能够帮助道路交通管理人员确定最佳的紧急救援方案、交通管控措施和安全隐患排除对策,从而有效地减少交通延误和交通运行风险,提高管理突发交通事件的水平。
目前,道路交通事件持续时间预测方法主要包括:状态概率,回归分析,时间序列,决策树,非参数回归,模糊逻辑,危险分析等方法。然而,国外相关研究缺乏具体分析过程[1-5],没有考虑我国道路条件、车辆性能及管理体制等方面的差别,亟需对我国交通事件的持续时间特征进行深入分析,并构建符合国情的预测模型。而国内外对于预测高速公路交通事件所造成的排队长度主要基于交通波理论和排队论2种方法进行研究[6-9],由于交通波理论能够描述交通需求变化状况下的车辆排队情况,本文选用交通波方法预测高速公路网交通事件影响范围。
本文在分析传统事件持续时间分段定义的基础上,分别建立交通事件持续时间4个阶段的预测模型,分阶段掌握高速公路网突发交通事件持续时间长度;其次,以事件检测及到场时间和清理时间作为输入参数,基于交通流波动理论,在传统封闭道路集散波模型的基础上,构建考虑出入口匝道及其衔接道路影响的高速公路网络交通事件辐射范围的预测模型,解决交通突发事件造成的空间上的交通拥堵辐射范围的预测问题。
1 突发交通事件持续时间预测
交通突发事件是指任何有计划和偶然发生的事件,它影响交通流的正常运行,如车辆碰撞、刮擦、抛锚、炸胎、车辆着火、散落物、行人穿越等,不同事件对其持续时间的影响不同。从事件的发生、发现、应急响应、现场清理、交通恢复等阶段考虑,提出了突发交通事件持续时间的4个阶段划分方法,包括:事件检测时间、事件响应时间、事件现场清理时间和交通恢复时间,见图1。下面就交通事件持续时间4个阶段的定义及其预测方法分别展开研究。
1.1 检测时间预测模型
定义事件检测时间为:从事件发生至接到事件报警的时间段。
根据经典波速理论,事件发生后,设向上游传播的集结波波速为W1,向下游传播的消散波波速为W2,事件发生点与上游检测器的距离为L1,

图1 交通事件持续时间分段方法Fig.1 Stage duration of freeway traffic Incident
与下游检测器的距离为L2,若采用双截面检测法来检测事件,事件检测时间(mean time to detection mttd,MTTD)的计算见式(1)。

式中:T(A)为检测算法的反应时间,即当事件产生的集散波到达事件检测器时至被检测出的时间;Te为其他影响因素产生的延误时间。由此可知,事件检测时间与事发点距离上下游检测器的距离、事件波的传播速度、检测算法的反应时间等因素相关。
1.2 响应时间预测模型
将到场时间定义为最先参与清除过程的车辆类型中第1辆车的到场时间。
采用华东地区某高速公路交警支队2006年的事件记录和接处警记录。通过直接影响因子分析,到场时间的因子主要有2个:事发时间段和救援车辆种类。为了区分不同时段对到场时间的影响,将影响相近的时间段归类,得到相关因子水平见表1。
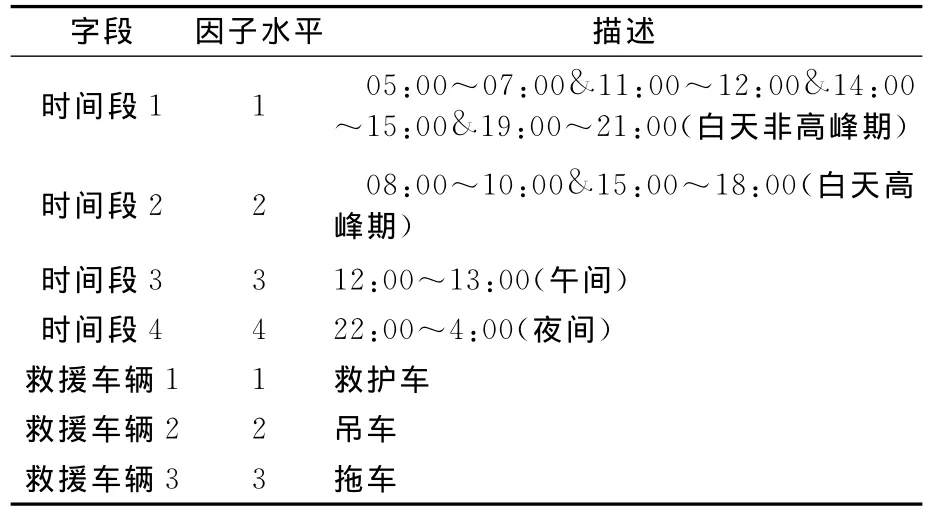
表1 相关因子水平及其描述Tab.1 Relevant factor levels and descriptions
由于最终确定的相关因子只有2个,且因子水平只有7类,故采用到场时间的范围预测而非常见值预测。
根据样本数据计算所得的各因子水平下该区间的上下限及相应到场时间的均值并将时间段因子水平与救援车辆因子水平拐点上下限进行组合,得到到场时间预测区间见表2。

表2 到场时间预测区间列联表Tab.2 To scene time prediction intervalcontingency table min min
将剩余40条数据组成的样本检验组来对比实际值与预测值,见图2,检验数据有80%以上的样本都落在预测区间之内,说明该模型能够有效地预测事件到场时间。

图2 模型预测值与实际值的对比Fig.2 The comparison of the model predictions with the actual value
1.3 现场清理时间预测模型
基于救援车辆的清除时间定义为:交通事件发生后,从第1次序救援车辆到场至当事车辆靠边或被清除的时间。本文采用基于人工神经网络的TSK型模糊逻辑系统来进行清除时间预测。确立模型的整体结构,见图3。

图3 模型整体结构Fig.3 The whole model structure
在ANFIS方法中隶属函数的参数是通过人工神经网络训练得到的,因此只需手动选择隶属函数的类型。本文选择更为平滑的高斯隶属函数,其表达式如下:

式中:c为隶属函数的中心,σ为隶属函数的宽度。通过多次试算,最终得到1个相对精确的清除时间预测模型。表3列出了预测模型中输入变量隶属函数的参数值。

表3 输入变量隶属函数参数Tab.3 Input variables membership function parameters
函数参数见表4。
由此可得,当交通事件的当事人员、当事车辆和救援车辆特征已知时,即可用上述TSK模糊逻辑推理模型预测事件的清除时间。对预测模型进行检验,得到样本值和预测值的散点图,见图4。其中圆圈代表清除时间样本值,星形代表模型预测值。

图4 清除时间样本值-预测值散点图Fig.4 Clear time sample values-predicted values scatter graph
可以看出,当样本值随事件当事人员、当事车辆和救援车辆特征参数的变化,预测值能够很好地模拟这种变化趋势,并且在清除时间不太短时取得了较好的预测效果。样本值越高,预测越精准。
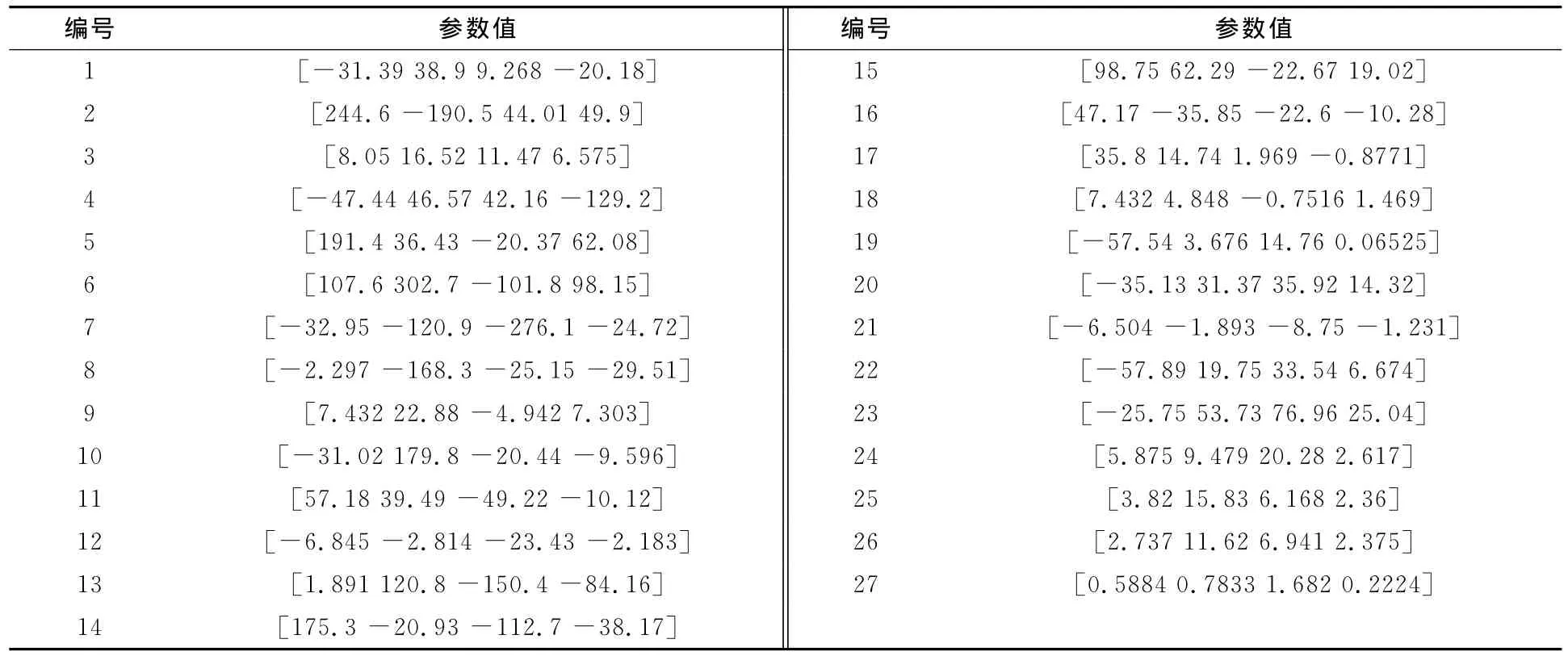
表4 输出函数参数值Tab.4 Output function parameter values
1.4 交通恢复时间预测模型
其定义为从事件处理完毕到事件对路网影响完全消散的时间[11]。
根据确定性排队理论,在得知前几个阶段的持续时间后,可以推算出交通恢复时间。如图5所示,当事件发生后,可以认为前2个时间段内交通状况不发生变化,即在事件检测时间段和事件响应到场事件段内,事件上游车辆到达和离去的流率不变,故可以合并为1个时间段T1来考虑。此处简化过程直接给出交通恢复时间结束时刻的计算式见式(3)。
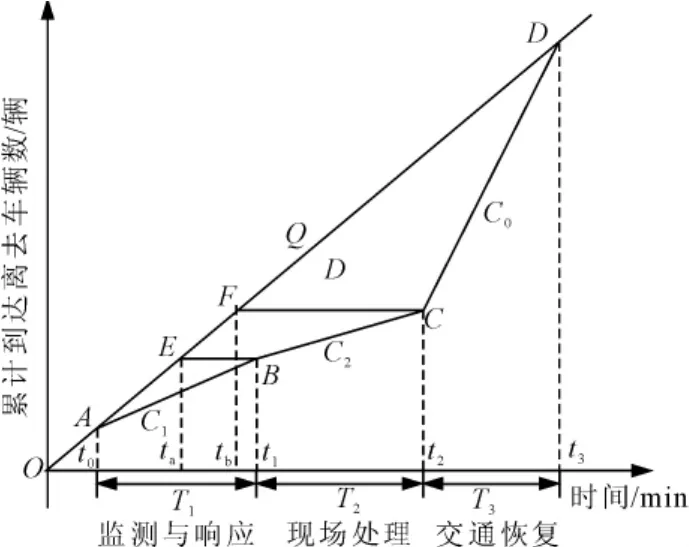
图5 事件上游车辆到达离去曲线图Fig.5 The events upstream vehicles arrive leaving graph

此时,交通恢复时间T3的预测式:

2 突发交通事件影响范围预测
美国《道路通行能力手册》将交通事件持续时间分为4个阶段:事件检测及确认时间、事件响应时间、事件清理时间和交通恢复时间。随着事件检测技术的日趋成熟和广泛应用,交通事件检测及确认的时间也越来越短,为了便于研究,本文将事件检测及确认时间和事件响应时间合并为1个时间段来考虑,即检测与响应时间段T1。此外还包括现场处理时间段T2和交通恢复时间段T3,事件集散波匀速传播示意图见图6。

图6 集散波匀速传播示意图Fig.6 Uniform transmission of traffic-wave
当高速公路发生交通事件后,事发车辆或其他障碍物占据了一定的车道,使主线通行能力低于初始流量。此时在事件发生断面处将产生第1道集结波,并以W01的波速向上游传播。现场处置工作开始后,交警封闭部分车道,导致事件断面处通行能力变化,产生新的集结波仍向上游传播,波速为W12。假设封闭车道直到事件处理完毕后才重新开放,即救援清障阶段不再产生新的集散波。现场清理工作完成后,事件断面恢复最大通行能力,产生向上游传播的消散波,波速为W23。当消散波完全覆盖前2个阶段产生的集结波时,路段通行能力恢复正常,此时事件对路网的影响基本消失。从事件现场清理完毕至事件影响基本消失的时间即为交通恢复时间,而消散波波面与最后1道集结波波面重合的地点至事件发生地点的距离即为主线上事件的最大影响长度,若事件导致车流的堵塞,则该长度为最大排队长度。
在考虑区域路网的情况下,事件还可能存在最大匝道影响长度和衔接道路影响长度等。三者共同组成事件对于区域高速公路网事件辐射范围。集散波在传至汇入匝道时,两者交通状态的变化也不一样,因此在主线上产生了新的集散波W′ij。同样,由于匝道汇入流量的变化,在匝道上也会产生集散波。
利用交通流波动理论,构建考虑出入口匝道和衔接道路的路网事件辐射范围模型来模拟和预测集散波在路网中的传播方式及其对路网交通拥堵和车辆排队的估计,交通事件影响范围模型见表5。

表5 交通事件影响范围计算表Tab.5 Traffic incident scope of influence calculation sheet
模型主要的输入参数有2类,一类是交通事件各阶段的持续时间,可以在得知交通事件基本特征加以预测或取经验值,另一类是各列集散波的波速,集散波波速公式是根据交通流量守恒方程推导出来的,适用于各种交通条件,只要确定了集散波传播前后2个交通状态的流量和密度参数,即可确定集散波波速。
3 交通事件影响范围预测模型的编程实现及其仿真检验
为了适应先进的事件管理系统实际应用的需要,采用面向对象的编程思想,构造集散波类并模拟集散波在路网中的辐射过程,将模型预测的交通拥堵和车辆排队状况通过渲染GIS地图实时地展示交通事件态势走向,为高速路网交通突发事件的态势评估和应急指挥提供决策支持,软件设计流程见图7和路网事件辐射范围预测态势见图8。
利用AIMSUN交通仿真技术,基于路网交通实际检测数据,输入交通流、车辆和事件场景等参数。根据检测器采集的流量和密度计算集散波的传播速度和传播长度,同时观察流量和密度变化趋势,找出波界面和实际传播长度作为检测值。经检测,当输入交通量为1 600pcu/(h·ln-1)时,模型取得了较好的预测效果,见表6。
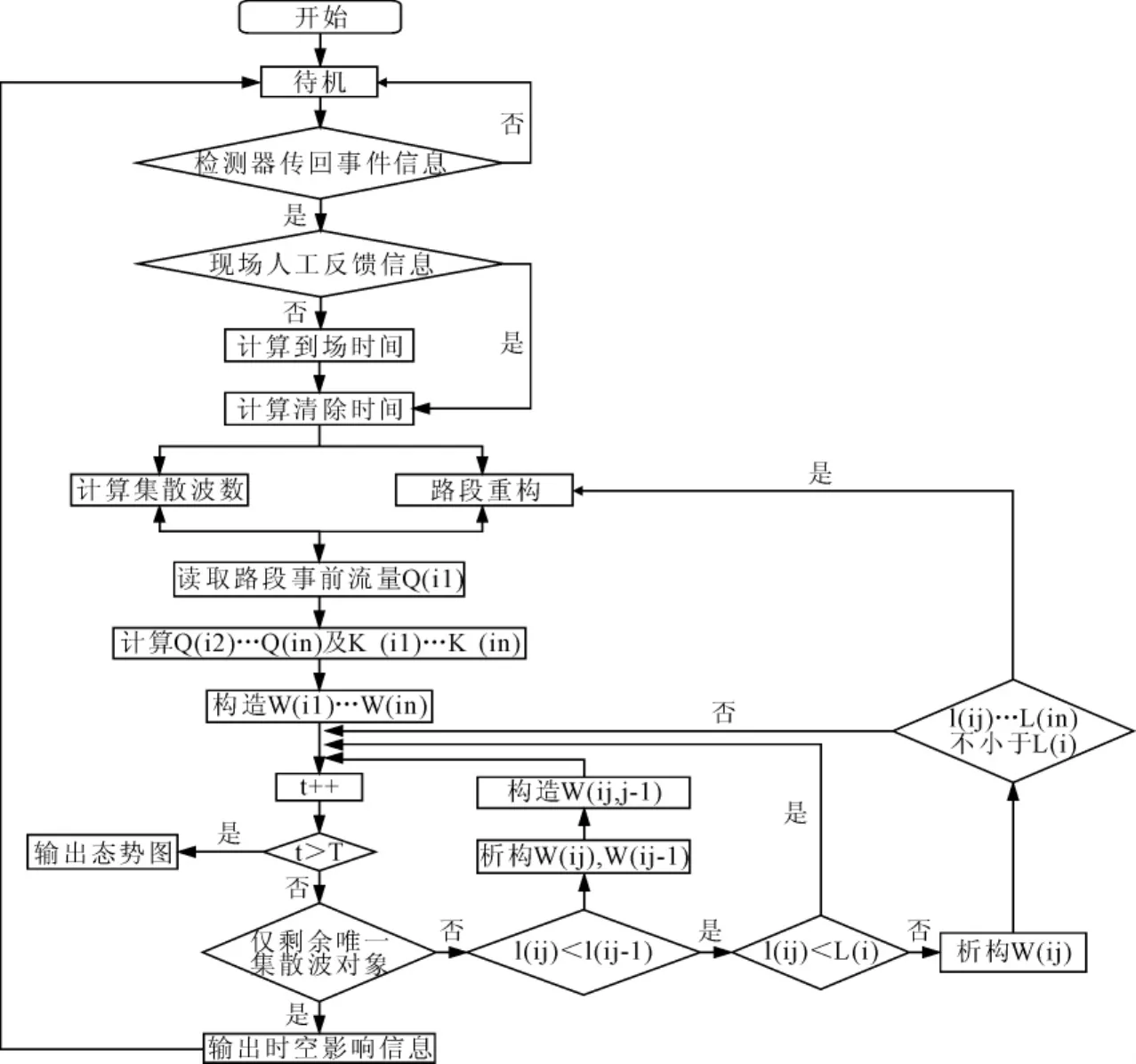
图7 软件流程图Fig.7 Flow chart of traffic-wave simulation
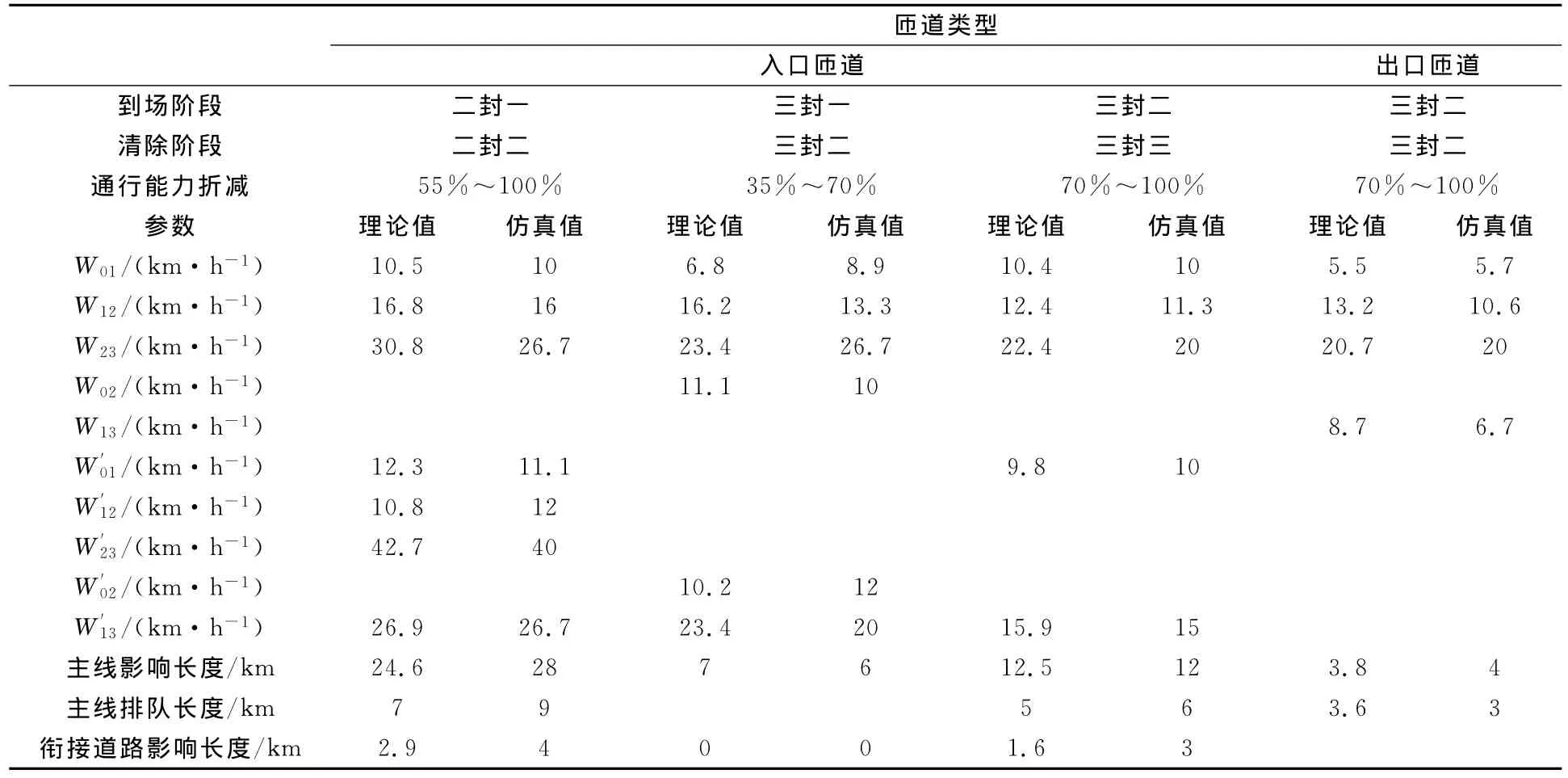
表6 模型理论值与仿真值的对比结果Tab.6 Theoretical values of model Vs results of simulation
主线初始流量增大时,由于交通流的动力学 效应产生的延迟作用和汇入点上游交通状态的动态稳定导致集散波波速的浮动,理论值和仿真值的误差会逐渐增大,但对于堵塞长度的预测结果仍然在1个较为理想的范围内。

图8 路网事件辐射范围预测态势示意图Fig.8 The road network situation of incident radiation scope
4 结束语
在分析传统事件持续时间分段定义的基础上,分别建立了交通事件持续时间4个阶段的预测模型;基于传统密闭道路集散波模型,提出了考虑出入口匝道及其衔接道路所构成的路网事件辐射范围预测模型,并以此为依据,采用面向对象的思想,设计了路网事件辐射范围预测计算机系统的架构和算法。通过仿真软件的检验,验证了该预测模型的有效性。论文提出的集散波模型可与交通事件各阶段持续时间的预测模型相结合,以持续时间预测的输出结果作为影响范围预测的输入参数,从而构成了高速公路网突发交通事件时空影响态势评估模型。
[1] Kaufmann A,Gupta M M.Introduction to Fuzzy A-rithmetic:Theory and Applications[M].New York:van Nostrand Reinhold Company,1985:1-10.
[2] Morales M J.Analytical procedures for estimating freeway traffic congestion[J].Public Road.1986,50(2):55-81.
[3] AI-Deek H.Garib A.Radawn A E.A new method for estimating freeway incident congestion[J].Transportation Research Record,1995,149(41):30-39.
[4] Sheu J B,Chou Y H.A stochastic estimation approach to real-time prediction of incident effects on freeway traffic congestion[J].Transportation research,2001(35):575-592.
[5] Lawson T W,Lovell D J,Daganzo C F.Using the input-output diagram to determine the spatial and temporal extents of a queue upstream of a bottleneck[J].Transportation Research Record,1997(1572):140-147.
[6] 姚荣涵,王殿海.拥挤交通流当量排队长度变化率模型[J].交通运输工程学报,2009,9(2):93-99.
[7] 臧华,彭国雄.高速道路异常状况下车辆排队长度的预测模型[J].交通与计算机,2003,21(3):10-12.
[8] 王建军.交通事件和干预作用影响下的高速公路车流波分析[J].重庆交通学院学报,2006,125(6):104-108.
[9] 郑黎黎,丁同强,范海燕,等.高速公路交通事件影响范围的模糊预测[J].数学的实践与认识,2009,39(1):72-77.
[10] 丛浩哲,方守恩,王俊骅.交通事件持续时间影响因素分析及其回归模型[J].交通信息与安全,2010,28(3):80-83.
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21 05:32:46
今日农业(2020年13期)2020-08-24 07:35:24
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29
中国公路(2017年10期)2017-07-21 14:02:37
意林(2017年8期)2017-05-02 17:40:37
地震地质(2015年3期)2015-12-25 03:29:41
医学研究杂志(2015年5期)2015-06-10 06:43:26
中国药业(2014年21期)2014-05-26 08:56:51