
基于增量式PID算法的无刷直流电机PWM调速研究
2013-08-18 07:44韩震宇
机电工程技术 2013年3期
吴 强,韩震宇,李 程
(四川大学,四川 成都 610065)
0 引言
无刷直流电机除了具有直流电机优秀的线性机械特性、大启动力矩、宽调速范围、简单的控制电路外,由于它利用电子换向器取代了机械电刷和机械换向器,所以它又具有交流电机的结构简单、运行可靠、维护方便等优点[1-3]。所以,无刷直流电机广泛用于家电、汽车、数控机床、机器人、固定升降平台等领域。本系统利用TMS320LF2407FA芯片产生的PWM波信号通过IR2136驱动芯片来控制开关管的导通顺序和开关通断时间比来控制电机的转向和速度,通过霍尔传感器测量电机电枢两端的电流,通过电机位置传感器输出的位置信号计算转速,然后根据PID算法计算占空比来实现对电机速度的控制,有效的提高了系统的运动精度,保证了电机转动的快速响应性和运动平稳性。
1 增量式PID算法原理
数字PID算法的基本原理就是利用偏差来计算系统的输出量,实现不断纠偏的过程,使系统最终趋于稳定。数字PID控制分为位置式PID控制和增量式PID控制。由于位置式PID采用全量输出,输出的是执行机构的实际位置,每次输出均与过去状态有关,计算时要对偏差进行累加,工作计算量大,并且,一旦数据处理计算芯片出现问题,将会使输出大幅波动,从而造成执行机构大幅波动,很有可能引起巨大的事故。而增量式PID每次只输出控制量的增量,所以在一些安全性和稳定性要求较高的场合使用增量式PID算法较好。所以本系统采用增量式PID算法。增量PID算法公式[4]如下所示:
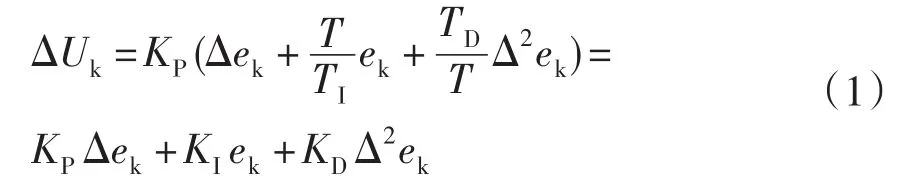
式(1)中:Kp为比例系数;积分系数KI=
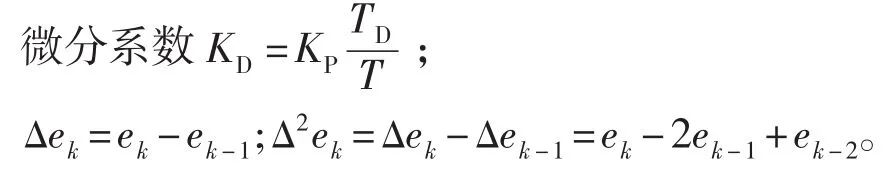
由于现在许多实际应用系统都要求位置式输出,而位置式输出可由上次位置式输出加本次增量输出计算得到。所以由增量式控制算法来计算位置式输出的公式为:

式(2)中,UK-1为第K-1次的全量输出,ΔUK为第K次的增量输出。
2 基于DSPTMS320LF2407FA芯片调速控制
PWM波调速控制是一种脉宽调制技术,无刷直流电流电机转速控制是通过改变电机电枢两端的电压来实现的[5]。本系统通过设置TMS320LF2407A的通用定时器1为连续增/减计数模式、计算值为250来控制PWM波的周期,通过PID算法计算占空比值保存在通用定时器的比较寄存器T1CMP中,当通用定时器1的计数值大于比较寄存器的值时,使T1PWM引脚输出高电平,通过驱动电路,使响应的开关管导通,从而实现对电机电枢电压的控制。原理如图1。

图1 PWM波调速
根据PID控制原理,要对电机转速进行控制,就必须获得电机的实际转速。本系统是通过电机的位置传感器检测电机的换向信号来计算转速的[6]。要捕获电机的位置信号,可通过DSP的捕捉口CAP1~CAP3,通过检测该口的状态来获取是那个传感器发出的上升沿或下降沿信号。由于采用的电机每个机械转有6次换相,电机每转60度就有一个换向信号,所以可以通过测量两次换相间的时间间隔Δt来计算电机的转速。计算公式为ω=60°/Δt。
3 系统硬件电路设计
系统硬件电路设计主要包括控制芯片TMS320LF2407A、驱动芯片IR2136外围电路设计,电源模块电路设计,电平转换模块电路设计。由于所用的开关电源为5 V,但是控制芯片TMS320LF2407A所用的电源为3.3 V,IR2136芯片为15 V供电,所以采用TPS7333实现5 V到3.3 V的电源转换,用TPS65130实现5 V到15 V的电源转换。而TMS320LF2407A的外围器件的驱动电源有3.3 V供电,也有5 V供电,所以必须在TMS320LF2407A与外围器件间做3.3~5 V和5~3.3 V的电平转换,所以选用74LVC4245芯片实现3.3~5 V电平转换,用74CBTD338实现5~3.3 V电平转换。同时,还须对驱动板强电信号和控制板弱电信号进行隔离,避免强电信号对控制板的影响,选用的芯片是HCPL-063。基本原理框图如图2。
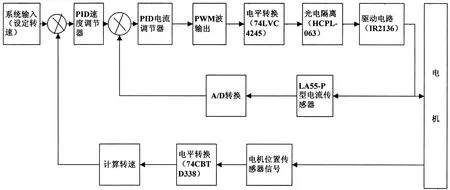
图2 基本原理框图
4 系统软件设计
本系统选用的开发软件为CCS2.0版本,软件质量的高低对整个系统性能起决定性作用。为了提高系统的控制精度,抵消测量误差、外部干扰、电机本身制造误差等的影响,在软件上,采用多次测量祛除粗大误差,再求其平均值的办法来抵消测量误差和大的干扰值,采用软件补偿的办法来抵消电机三相电阻的不均匀性。程序中采用的电流调节周期和速度调节周期分别为1ms和3 ms。软件流程图如图3所示。
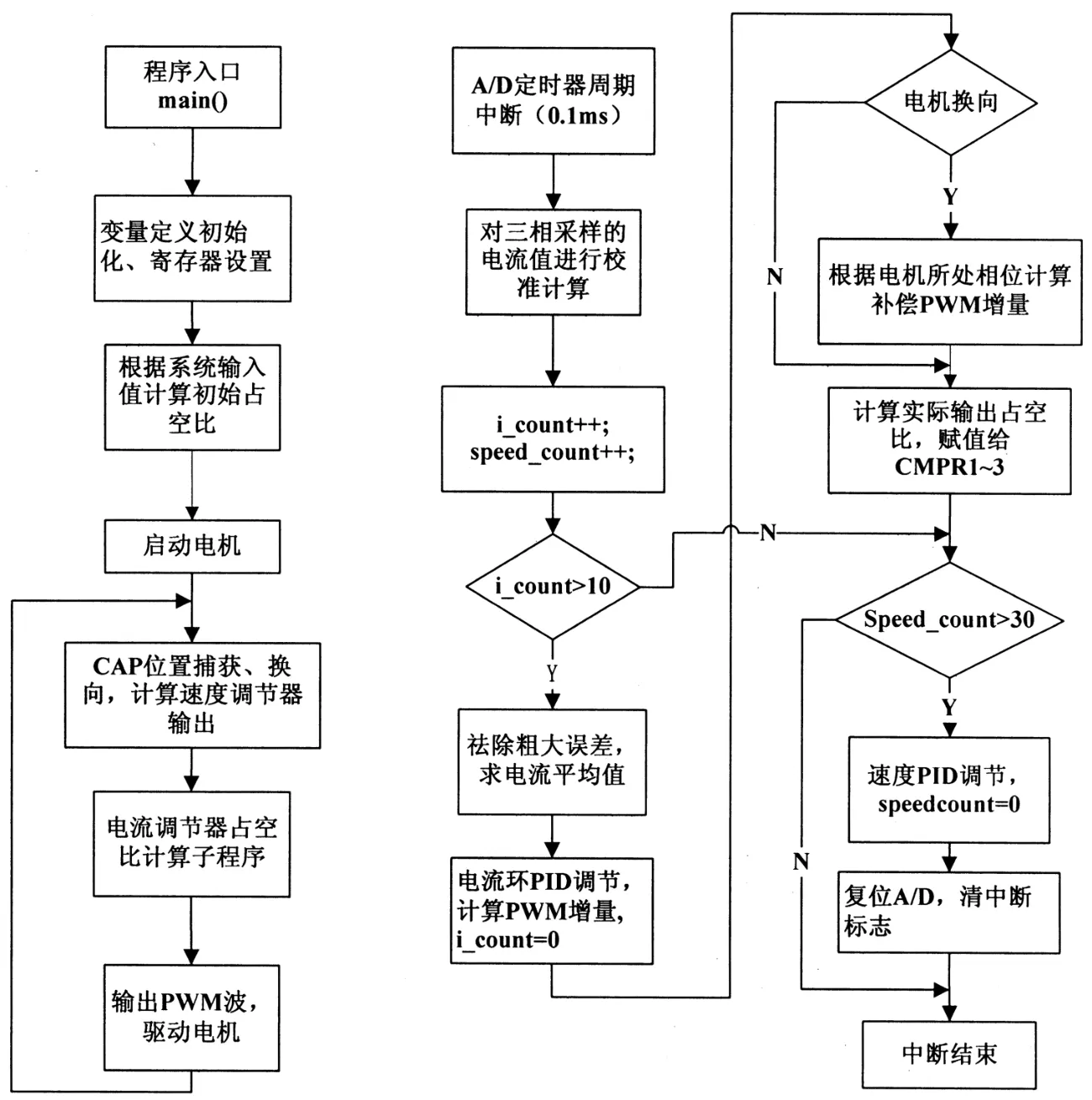
图3 软件流程图
5 实验结果
本系统控制对象为BM14182XF-500W48V型号永磁无刷直流电机,图4为电机在给定转速为100 r/min条件下的响应曲线,由曲线可知,采用增量式PID算法和PWM波脉宽调制技术对电机进行闭环控制使电机转速上升快、超调小、运行稳定。
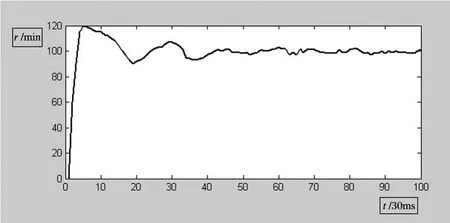
图4 电机转速响应曲线
6 结束语
基于增量式的PID控制算法既具有算法简单、易编程的优点,又具有控制可靠、控制成本低、控制精度较高的特点。因此,PID算法在电机调速控制系统中获得广泛的应用。同时,本系统也通过实际的硬件电路设计和软件编程实验有效的证明了PID算法在电机调速控制中的优点。
[1]刘和平.DSP原理及电机控制应用[M].北京:北京航空航天大学出版社,2006.
[2]钟德刚,方浩.两相无槽无刷直流电机的无位置传感器控制[J].机 电 工 程 , 2011 (12):1502-1505.
[3]范前峰,傅惠南,徐宇.基于单片机平稳运行的无刷直流电机无传感器控制系统设计[J].机电工程技术,2012(7):16-19.
[4]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002.
[5]孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008.
[6]韩学军,侯建勋,张根元.基于DSP的无刷直流电机速度控制系统[J].现代电子技术,2008,31(5):121-123.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
电子制作(2017年1期)2017-05-17
电测与仪表(2016年22期)2016-04-12
电源技术(2016年2期)2016-02-27
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
