
基于无位置传感器电机控制方式的人工辅助心脏控制器研究
2013-08-18 07:44王效亮刘志蕾
机电工程技术 2013年3期
李 雪,王效亮,栾 婷,张 芳,刘志蕾,张 磊
(1.北京精密机电控制设备研究所,北京 100076;2.北京航空航天大学,北京 100191)
0 引言
据世界卫生组织调查,目前心血管疾病和心脏病占到所有疾病的30%左右,预计至2020年,心血管疾病和心脏病将占到所有疾病的40%。心脏移植手术虽已取得极大的成功,但心脏移植受到捐心脏的人数少和患者自身临床手术等多方面的限制。因此,作为心衰病人暂时性辅助循环或心脏移植病人过渡治疗的人工辅助心脏具有很强的实用价值和广泛的应用前景。
人工辅助心脏装置主要由血泵及其控制器组成,血泵是关键的执行机构,由离心泵、轴向磁场盘式无刷直流电机集成在一起,电机的转子同时也作为泵的叶轮。控制器是人工辅助心脏装置的控制核心,主要完成设定转速、控制血泵可靠运行等功能。血泵的运转需要电子控制单元实现精确换相,因此准确检测转子的位置并根据转子位置实时切换功率器件的触发组合状态是人工辅助心脏控制器能否可靠运行的关键。
目前常用的检测转子位置的各种位置传感器均具有不便于维护、增加电机体积、环境适应性差、引出线较多等一系列问题,不适用于血泵置入人体要求体积小,引出线少的应用场合,因此,血泵项目中电机控制采用了无位置传感器控制方式。
1 无位置传感器电机控制技术分析
无位置传感器电机控制技术是指不需要安装机械式位置传感器检测电机转子位置信号,而间接通过检测电机的电压、电流、磁链等物理量来得到转子位置信息的控制方式。无位置传感器电机控制的关键技术主要集中在位置检测技术和起动技术两个方面[1-2]。
1.1 位置检测技术
在位置检测技术发面,很多国内外研究人员在这方面做了大量的研究工作,提出了多种理论和方法,主要包括:磁链位置估计法、模型参考位置估计法、状态观测器法、检测电机相电感变化的位置估计法和反电势过零检测法等,其中反电势过零检测法是最易实现,也是目前应用最广泛的位置检测方法。
反电势过零检测法的工作原理如下:在无刷直流电机中,定子绕组的反电势为梯形波,且正负交变;绕组反电势发生过零后,延迟对应于30°电角度的时间,即为电动机换相时刻。因此,反电势过零检测法只要检测到各不导通相反电势的过零点时刻,即可获知转子的若干关键位置,实现无位置传感器无刷直流电机的换相控制。
1.2 起动技术
无刷直流电机的绕组反电势与电机转速成正比,当无刷直流电机处于静止或低速运转状态时,反电势为零或者很小,无法准确地检测到反电势信号,也就不能应用“反电势法”判断转子位置,因此电机无法自起动,需要寻求其他方法来解决起动问题。由于没有转子位置信号,无刷直流电机的起动变得非常关键,如果起动方法不当,可能导致电动机失步甚至反转。
目前无位置传感器无刷直流电机常用的几种起动方法包括:任意位置开环起动法,特定位置开环起动法和询问起动法等,其中任意位置开环起动法随意性较大,可能会出现较严重的反转现象;询问起动法适合于具有凸极效应的电机,限制了这种方法的应用。特定位置开环起动法将无刷直流电机从静止到自同步状态之间的起动过程分为预定位—>加速—>切换三个阶段,因此也称为“三段式”起动法。预定位阶段由控制器给电机中任意两相绕组通电,产生一个合成磁场,在该磁场的作用下,转子会向合成磁场的轴线方向旋转,直到转子磁极与该合成磁场轴线重合;外同步加速阶段是按照预先设置好的换相顺序对功率管轮流导通,同时逐步提高换相频率,并加大外施电压,直到达到预定频率;外同步到自同步的切换阶段是指电机从外同步加速切换到根据反电势过零点换相的自同步阶段,切换要求平滑稳定。“三段式”起动法是目前使用最广泛的起动方法,它可以有效地控制转子转动的方向。
综上,人工辅助心脏控制器采用反电动势过零检测法和“三段式”起动法实现无位置传感器电机控制。
2 人工辅助心脏控制器设计
2.1 工作原理
人工辅助心脏控制器工作原理如图1所示。
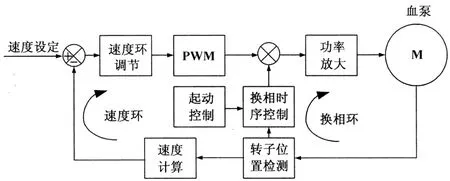
图1 人工辅助心脏控制器工作原理
人工辅助心脏控制器启动后,由起动控制决定换相时序,依次完成“预定位”—>“外同步加速”,当达到预设切换速度时,开始切换为根据转子位置判断换相时序的“自同步”稳定运行状态,此时转子的位置信息通过转子位置检测电路获取,同时控制器将用户设定的速度与通过转子位置检测获取的转子速度进行闭环比较,通过速度环调节后生成PWM信号,与换相时序信息共同控制功率放大电路实现对血泵的无位置传感器电机调速控制。
2.2 控制器实现方案
控制器实现方案如图2所示。

图2 控制器实现方案
由图2可知,人工辅助心脏控制器主要包括主控电路、自举驱动电路、三相逆变桥电路、过流保护电路、输入输出电路、报警电路和数据记录电路等。
主控电路的控制核心芯片选用了Micro Linear公司的ML4425智能型无刷电机控制芯片[3],可用于为三相无刷电机提供封闭回路的换相控制信号,同时利用PWM模式对电机速度进行闭环控制,并提供电机运行必要的保护。预定位电路、加速控制电路、切换控制电路和反电动势检测电路是主控电路的一部分,辅助ML4425完成起动控制和转子位置检测功能[4]。
驱动电路采用自举驱动方式工作。常用的电机驱动方式有独立电源驱动和自举驱动两种,独立电源驱动方式至少需要四路独立电源才能驱动三相六路功率逆变桥,元器件数量多且体积庞大;而自举驱动方式仅需用一路独立电源即可实现三相六路功率逆变桥的驱动功能,大大减少了独立电源的数量,因此本设计中采用了自举驱动方式。

图3 IRFS4310安全工作区
三相逆变桥电路的方案主要是大功率MOSFET的选型,MOSFET必须在安全工作区内才能可靠工作。图3所示为IRFS4310的安全工作区,图3中ID=0,VDS=0,ID=140 A与低压侧的导通电阻RDS(ON)共同围成的区域为安全工作区。从图中来看,壳温25℃,结温175℃,单脉冲的极限条件下,MOSFET IRFS4310连续开通1 ms,当电机电压达到20 V时,安全可靠的工作电流只有约15 A。实际应用中在最大占空比95%时,IRFS4310应能可靠工作在10 A左右。
过流保护电路由功率电流采样电阻和低通滤波器组成,采样电阻将电机电流采样为电压值,通过低通滤波器滤除高频干扰信号后送到控制芯片ML4425,如果电机电流超过设定值,即采样的电压值超过设定值,ML4425将封闭控制输出通道来实现过电流保护功能[5]。
输入输出电路包括液晶显示器和按键输入电路,其中液晶显示器采用OLED有机发光二极管屏,相比普通LCD液晶屏具有无需背光灯、能耗低、厚度薄、重量轻、抗震性能好、可视角度大和动态响应速度快等优点,适合于移动手持设备中应用。
当控制器工作状态异常,如电机电流大,电池电压低,电机转速异常等情况下控制器启动报警系统,通过声、光等双重手段向用户及其监护者发出警报。
数据记录电路可以实时地记录控制器运行状态及各种重要参数,为医生和患者提供准确可靠的控制器运行数据。
2.3 控制参数计算
根据ML4425使用手册,预定位电路、加速控制电路、切换控制电路、反电动势检测电路的控制参数,以及ML4425的PLL环参数、速度环参数等大量参数的计算十分复杂,每次调整控制参数都需要进行一轮重新计算,为了避免以上繁复的操作,设计了一款简单的参数计算工具表,见图4所示。
只要在上表中输入电机运行参数,即可得出控制器相应的控制参数值,此表使用简单,可显著节约时间和精力。
3 试验研究
无刷直流电机用电子换相装置代替了有刷直流电机的机械换相装置,其稳定可靠地运行是通过逆变器功率器件随转子的不同位置相应地改变其触发组合状态来实现的,因此准确检测转子的位置并根据转子位置及时切换功率器件的触发组合状态是无刷直流电机无位置传感器控制的关键。人工辅助心脏控制器控制血泵运行的三相端电压如图5所示。

图4 控制器参数计算表

图5 人工辅助心脏控制器控制血泵运行的三相端电压
如图5,三相端电压波形均衡,无异常畸变,每相波形间相差120°。任一相端电压波形中,每周期波形包含6个突变点,每个突变点间隔60°,波形的突变点是由于换相时的电压突变导致的,因此这些突变点正是电压换相时刻的换相点。端电压波形中的斜坡部分可以间接的反映出该相处于不导通相时的反电势信号波形,而反电势信号的过零点发生在端电压波形中斜坡的中点,从图5来看,血泵运行时的换相点正是反电势过零后延迟30°,即人工辅助心脏控制器的换相点是理想换相点。图6所示为血泵运行情况。

图6 血泵运行情况
4 结束语
本文研究了一种应用于人工辅助心脏项目的无位置传感器电机控制器,其中转子位置检测采用了反电动势过零检测技术,而电机起动方式采用“三段式”起动技术。该控制器实现了人工辅助心脏项目要求的长时间高可靠运行,并且具有体积小巧,开发简便等特点,试验结果表明该控制器能够满足人工辅助心脏项目的使用要求。
[1]陈宝.无位置传感器无刷直流电动机控制技术研究[D].上海:上海交通大学,2005.
[2]周伟刚.一种无位置传感器控制的汽车引擎无刷直流冷却风机系统[J].机电工程技术,2011(3):26-28,109.
[3]樊平,马瑞卿.基于ML4425的无刷直流电动机控制器设计[J].微电机,2007(7):54-56.
[4]季少武,陈晋,戴敏,等.基于ML4425的无传感器无刷直流电机控制电路设计[J].机械制造与自动化,2006(6):139-142.
[5]陈敏祥,张小波.ML4425在无位置传感器无刷直流电机控制中的应用[J].微特电机,2003(5):45-46.
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2020年4期)2020-12-14
河北理科教学研究(2020年1期)2020-07-24
中国生物医学工程学报(2019年5期)2019-07-16
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
机床与液压(2014年6期)2014-03-09
首都医科大学学报(2011年6期)2011-06-12
中国医疗设备(2010年7期)2010-08-07
