基于LVDT信号注入的力纷争试验方法研究
2013-08-16 07:26:18金学良
机械设计与制造工程 2013年7期
金学良
(上海飞机设计研究院,上海 201200)
民用飞机一般配置多余度作动系统来提高电传飞控系统的可靠性和安全性[1]。由于多余度作动系统的结构形式不同以及元部件的制造和安装误差积累,可能会导致控制同一舵面的不同作动器位移输出不同步,继而导致同一舵面的不同作动器间相互抗争,这种现象称为力纷争现象。力纷争现象将导致操纵舵面的扭曲,引起舵面的疲劳破坏,严重时危及飞行安全。因此,飞控系统设置了力纷争控制律来减缓或消除力纷争现象。为了确定力纷争控制律的设计是否满足系统要求,必须采用试验方法加以验证。
为了验证飞控系统的力纷争控制律,本文设计了一种力纷争试验方法,即在系统的位置反馈回路中注入不同步指令来实现力纷争。
1 力纷争试验方法
力纷争试验能够验证飞控系统设计需求的正确性、评价力纷争控制律的优良,也是民用飞机适航验证试验的一项重要内容。力纷争控制律集成在飞控计算机中,主要包括力纷争均衡和力纷争监控两部分,用来减缓或消除力纷争现象。
定义控制同一舵面的多作动器间的两腔压力差之差为DDP,力纷争控制律设置了DDP监控的幅值门限P1和P2、次数门限值N和时间门限T。当DDP超过门限值P1并保持T时,或当DDP超过门限值P2并累计到N次时,力纷争监控器触发,飞控计算机发出控制指令切换作动器工作模式,由主动模式变为被动模式,只保留一个主动作动器驱动舵面,从而消除舵面作动器间的力纷争。
力纷争的试验通常是对同一控制面的多个作动器输入不同步指令来制造力纷争。对于分布式数字电传飞控系统,如图1所示,采用远程控制电子对作动器进行直接控制,飞控电子和远程控制电子之间通过数据总线连接。每个作动器上安装LVDT位置传感器来检测作动器的输出位移,并反馈给对应的远程控制电子,形成位置控制闭环。
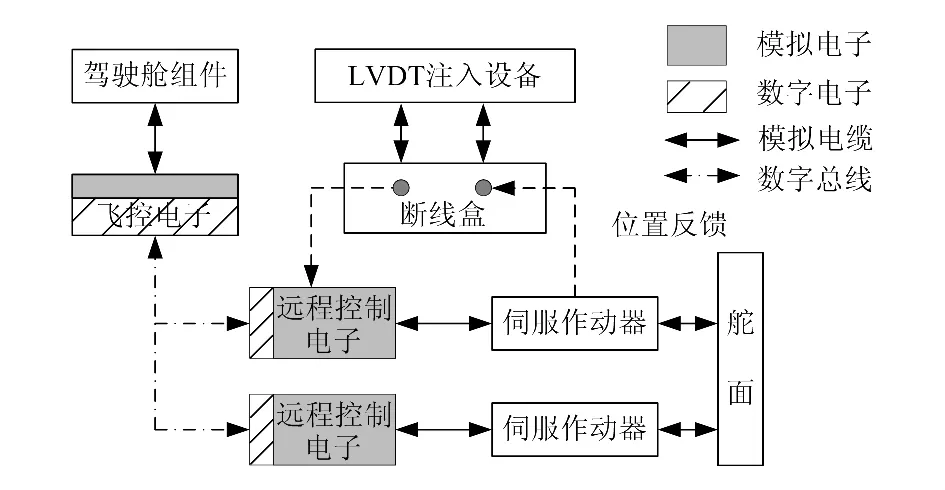
图1 LVDT信号注入原理
对于这种分布式数字电传飞控系统,若从驾驶舱对两个作动器注入不同步指令,由于飞控电子内部的表决机制及监控逻辑,不同步的控制指令将无法传输到作动系统。因此,提出了一种在作动器LVDT位置反馈上迭加控制指令的信号注入方式,通过LVDT注入设备,在断线盒处注入控制指令,使得舵面的两个作动器的控制指令产生差值,从而产生力纷争。安装在作动器上的压差传感器将作动器的两腔压差信号反馈给远程控制电子,再通过数据总线反馈给飞控电子,判断力纷争监控器是否触发。
2 力纷争试验仿真
2.1 系统建模
现代民用飞机的作动系统都是多余度的,其液压部分是一个阀控液压缸系统,以双余度作动系统为例,使用AMESim软件建模,如图2所示。其工作原理为:控制指令通过相同的增益环节K发送指令给两个作动器,驱动两个作动器共同控制舵面运动。用位移传感器把液压缸的位移转换为电信号,并与给定的位移信号进行比较后输出闭环控制的误差信号,所得到的误差通过PID校正环节后驱动伺服阀动作,以此接通或切断液压缸的液压油供应并改变供油方向,从而实现对液压缸位移的大小和方向的控制。在其中一个控制通道,通过注入外部信号来改变液压缸的位移控制指令,使得两个通道作动器输出位移不一致,同时检测两个作动器的两腔压力差,监控DDP状态,判断系统是否触发力纷争监控。
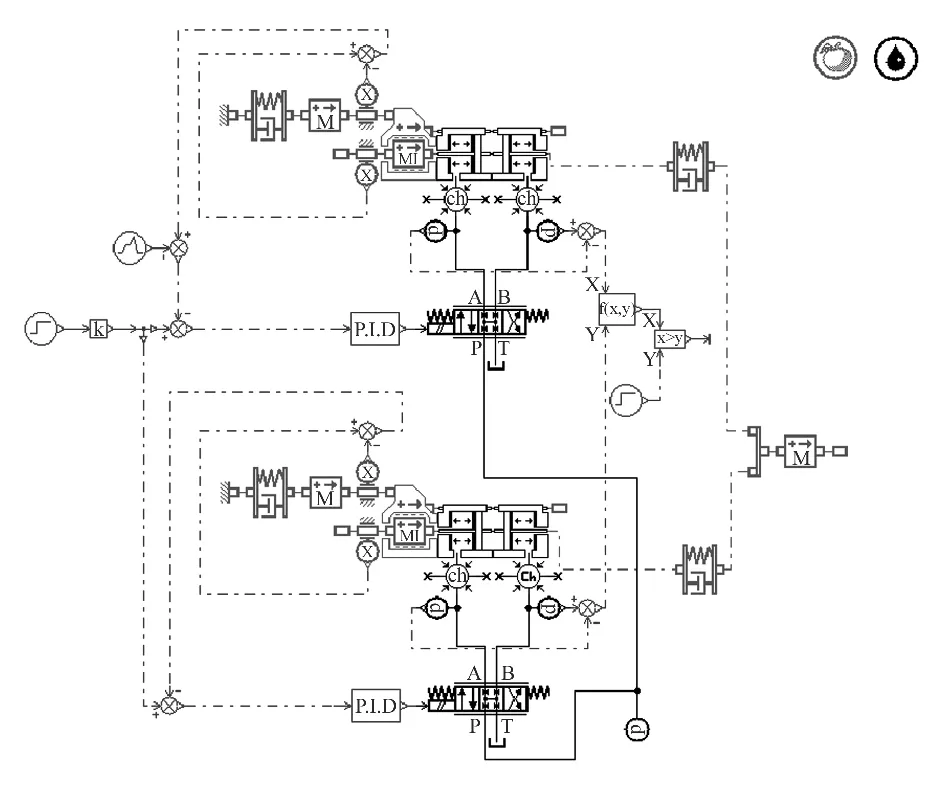
图2 力纷争试验模型
2.2 仿真分析
力纷争试验模型的仿真结果如图3,4所示。由图可知,在对系统注入很小的偏差信号时,作动器两腔压差变化较大。假设力纷争幅值监控门限为P1,次数监控门限为N,当监控到DDP第三次超过P1后,系统监控器将触发。
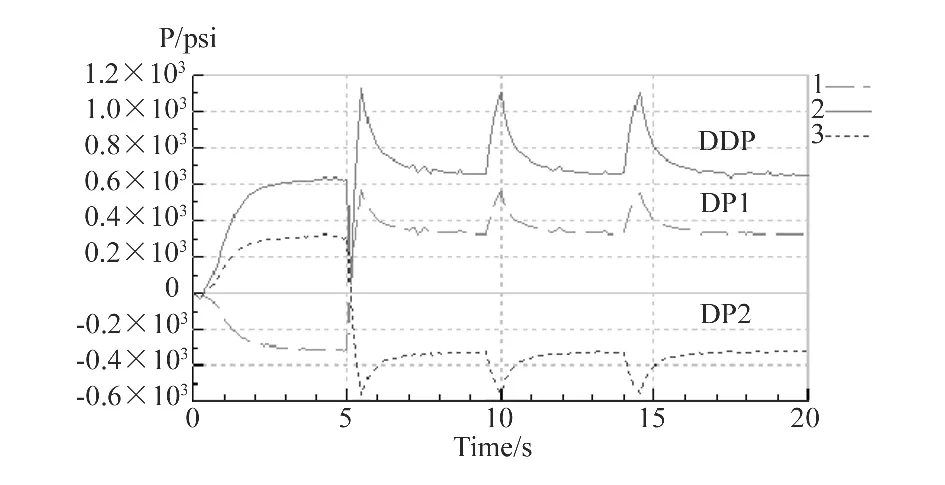
图3 压差仿真结果
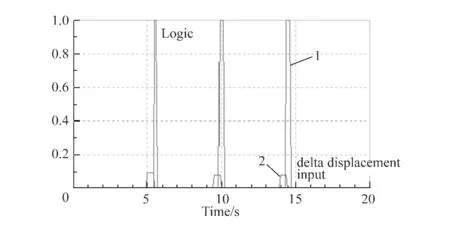
图4 系统输入偏差及输出逻辑
设置输入偏差信号为长周期方波信号,当DDP大于力纷争监控器的幅值门限P2时,系统输出为1,如图5,6所示。当输出信号1的持续时间大于力纷争监控器的时间门限T时,系统触发力纷争监控。

图5 压差DDP仿真结果
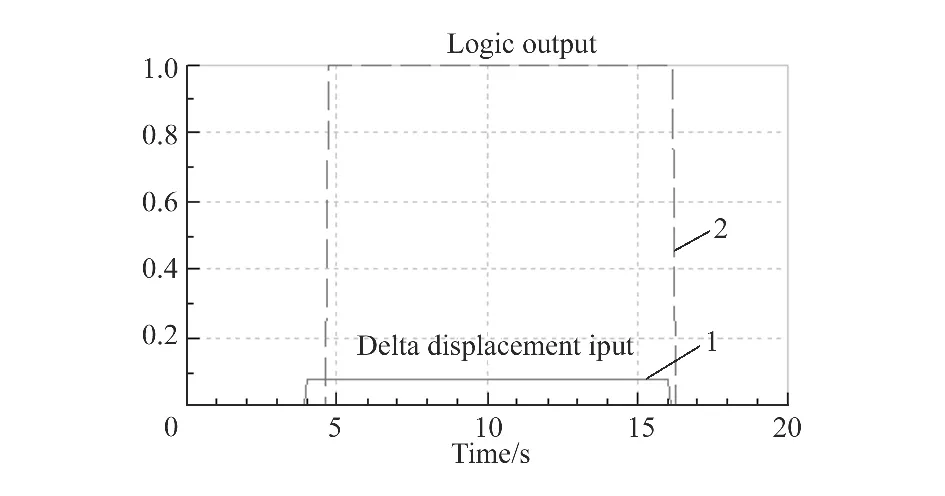
图6 长周期方波输入及输出逻辑
由仿真结果可知,在作动系统位置反馈信号处注入偏差指令可以触发力纷争监控。由于飞机作动器的位置传感器通常采用线性可变差动传感器(LVDT),为了在LVDT传感器上注入位置偏差,需要了一种力纷争试验装置来支持力纷争试验。
3 力纷争试验装置
采用LVDT信号注入装置在作动器的位置反馈处对余度作动器注入不同步指令,如图7所示,装置串联在作动器LVDT传感器与远程控制电子之间。LVDT信号注入装置不打断激励信号,只针对反馈信号做处理。利用位于传感器后的2路AD采集通道,采集传感器输出的2路交流差动电压信号,利用已知的传感器灵敏度系数或者传感器的输出特性曲线,通过数学计算得到传感器的位移量,从上位机发出偏差指令迭加到已检测的位移量上,再利用2路D/A通道输向远程控制电子。
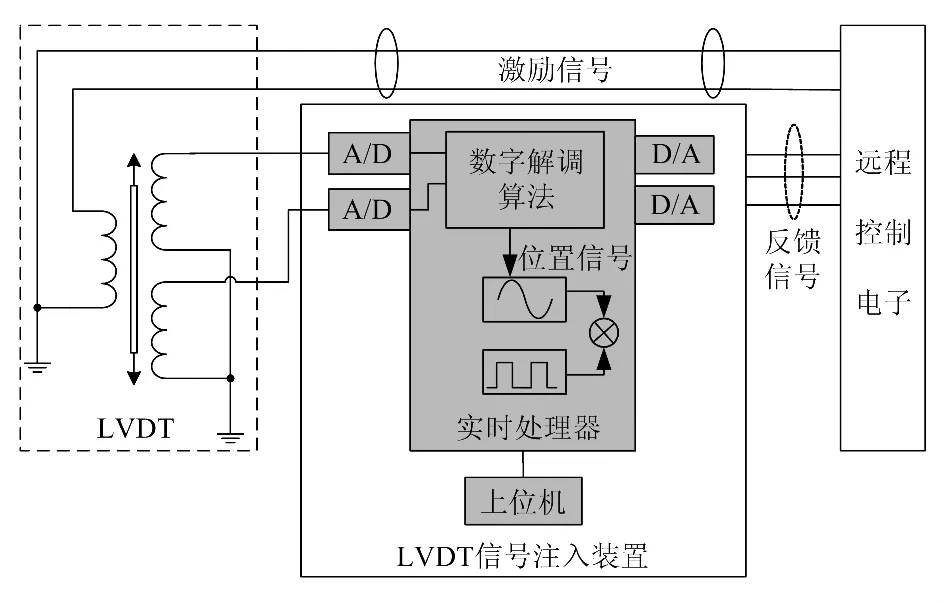
图7 LVDT信号注入装置原理
a.信号调理:将传感器输出的交流差动电压信号,转换为与传感器位移成线性关系的直流电压量。
b.信号采集:A/D采集板卡对经过信号调理之后的直流电压信号进行采集。
c.数字解调:在已知传感器输出特性曲线时,只需要获得传感器2路交流反馈信号电压的有效值即可求得其位移量[2]。
d.信号注入:通过上位机可以将偏差指令发送给下位机(嵌入式实时处理器),下位机将偏差指令迭加到已解算的作动器位置反馈信号上,并通过DA板卡输出到远程控制电子。
4 结论
本文提出了一种基于LVDT信号注入的力纷争试验方法,并通过AMESim建模仿真验证了该试验方法的可行性。为了在实际工程中应用该力纷争试验方法,提出了一种LVDT信号注入的实现方案,能够满足力纷争试验的需求。此种试验方法在工程领域具有较高的实用价值。
[1] 刘林,郭恩友.灵巧式舵机并行驱动的研究[J].北京航空航天大学学报,1996,22(2):137-170.
[2] 李飞,张勇,陈慧琴.交流差动变压器式位移传感器数字调理方法[J].仪表技术与传感器,2011(1):84-85.
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:17:14
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
装备维修技术(2021年37期)2021-11-03 20:39:09
当代陕西(2020年23期)2021-01-07 09:24:58
现代电子技术(2019年15期)2019-08-12 06:15:44
智富时代(2019年2期)2019-04-18 07:44:42
哲学评论(2018年1期)2018-09-14 02:34:28
东北史地(学问)(2017年1期)2017-06-15 20:27:19
科技视界(2016年13期)2016-06-13 23:11:43
飞行力学(2015年5期)2015-03-15 12:04:54