基于北斗卫星导航系统的功率倒置算法仿真研究
2013-08-16 06:12:40曹有权
科技视界 2013年5期
曹有权
(西安导航技术研究所,陕西西安710068)
1 北斗卫星导航系统概述
北斗卫星导航系统是中国正在实施的自主发展、独立运行,并与世界其他卫星导航系统兼容共用的全球卫星导航系统,其发展目标是对全球提供无源定位[1]。北斗卫星导航系统的应用前景非常广阔,但与此同时,它的工作环境同样面临着严峻的挑战,卫星导航系统的信号非常微弱,其功率强度甚至远低于接收机内部噪声[2],微弱的干扰就可能使导航系统不能正常工作,尤其是有意或者无意的压制式干扰。
对北斗的干扰从频率角度可以分为带内干扰和带外干扰,带外干扰可以在射频和中频设置窄带滤波器进行滤除,而带内干扰可采用自适应阵列天线来解决。 北斗接收机收到的干扰数目、干扰方向及干扰类型无法预知,卫星信号的来向和数目也在实时变化,这种情况下采用功率倒置自适应算法抑制干扰显得简单有效[3]。
2 功率倒置的原理
功率倒置自适应算法是基于线性约束最小方差(LCMV)准则建立的[4],也就是将自适应阵列的输出功率最小作为最优化准则[5]。 功率倒置算法的示意如图1 所示:
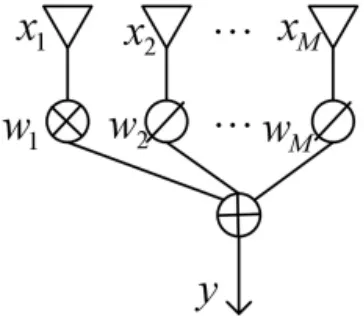
图1 功率倒置算法示意图
在M 元功率倒置阵列中,阵列的输入向量为:

其对应的权系数分别为:

一般有约束条件wHs=1,其中s=[1,0,…,0]T,由此可得出w1=1,这是要求第一支路的加权系数始终为1。
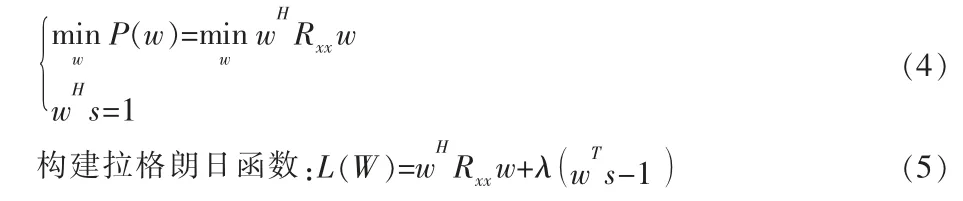
则阵列的输出功率:

上式中Rxx=E {x(n)xH(n) }为输入矢量的自相关矩阵。
则功率倒置波束形成的准则如下:
令ΔwL(w)=0,
可得最佳的加权矢量和最小输出功率为:

功率倒置阵对输入端的信号,不管是有用信号还是干扰信号都尽可能地加以抑制,天线方向图将在各个有用信号和干扰信号的来向产生零陷,并且信号越强,其对应的零陷越深。因为在北斗卫星导航系统中,干扰信号远远大于噪声信号和有用的卫星信号,那么零陷将仅仅对准干扰方向,这样在干扰也就被大大的抑制,相当于提高了系统输出端的信干比[6]。
3 试验仿真
用Matlab 建立仿真模型,对功率倒置算法进行仿真研究。
3.1 窄带信号波束仿真
假设信号中心频率为1268.52MHz,信号功率为-130dBm,阵列中存在高斯白噪声信号,噪声功率为-100dBm。以四单元阵列为例,对功率倒置算法进行仿真。 四阵元最典型的有两种分布形式,分别为四元Y 型阵分布和四元方型阵分布两种。两种阵元的具体分布如下图2 所示,阵元之间间距d 为信号的半波长。
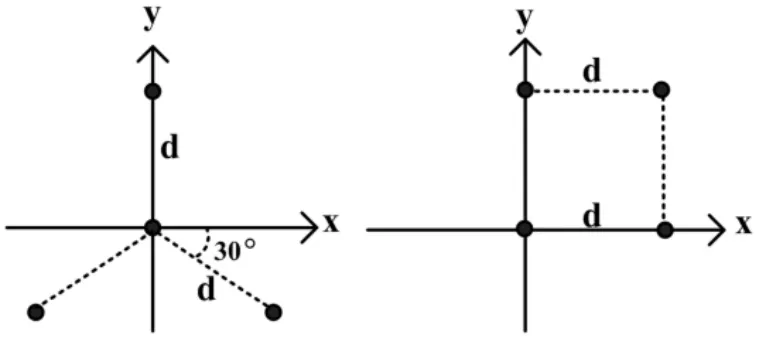
图2 四元Y 型阵和方型阵分布图
假设信号来向为(20°,80°),干扰信号由(50°,50°)入射,干信比为40dB,即干扰信号功率为-90dBm,采样快拍数位2000。 分别对两种阵元模式进行仿真。 结果如下:
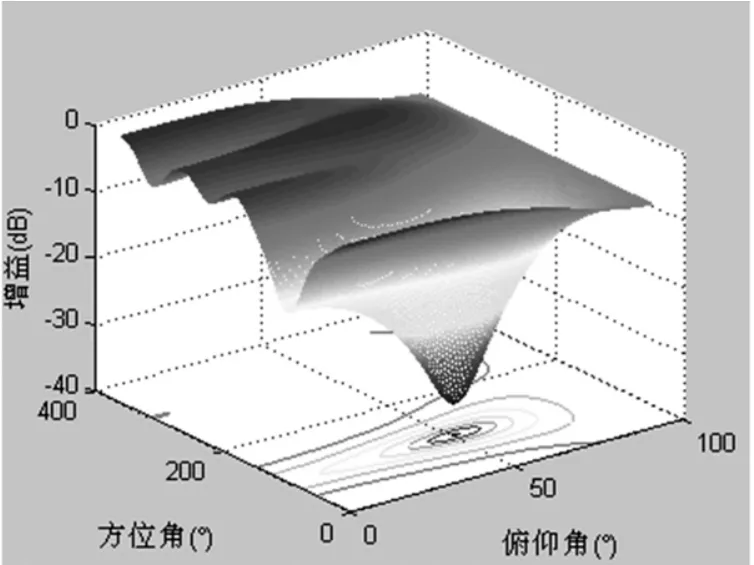
图3 Y 型阵全视角的方向图
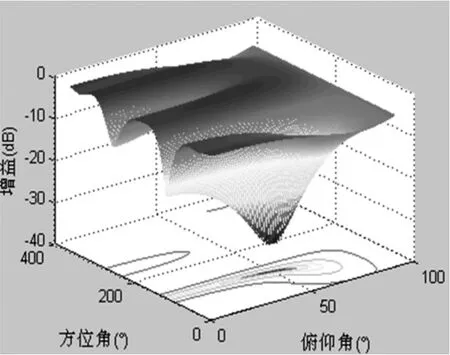
图4 方型阵全视角的方向图
从上面图中可以看出,两种阵列模式在干扰方向都能形成明显的零陷,从而都能有效抑制干扰,但是Y 型阵最大零陷深度为-35.05dB,方型阵最大零陷深度为-33.38dB,即Y 型阵在干扰方向形成的零陷更深。
仿真分析两种阵列模式在不同干扰强度下的方向图,具体结果见表1 所示:

表1 两种阵列模式在不同干扰强度下的最大零陷深度
从上表可以看出,在干信比为40dB 到90dB 的范围内,Y 型阵的最大零陷深度普遍要深于方型阵的最大零陷深度,从而对于干扰有更彻底的抑制效果。 即Y 型阵要优于方型阵,这和Y 型阵在阵元分布与信号来向分布的空间不相关方面具有的优势有很大关系。
3.2 Y 型阵多干扰方向图
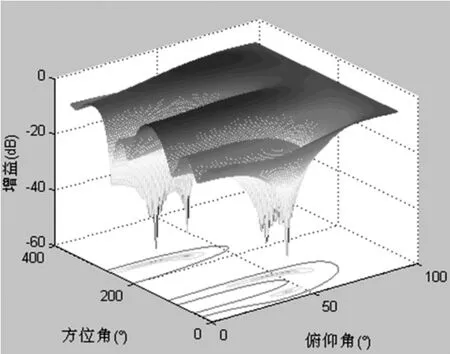
图5 干信比为40dB 两干扰方位图
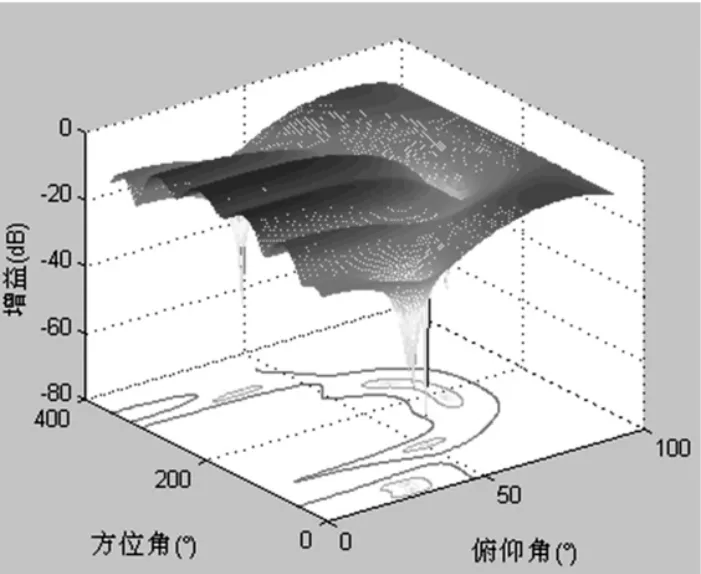
图6 干信比为60dB 三干扰方向图
上面仿真分析得出,四阵元Y 型阵要优于方型阵,以四阵元Y 型阵为模型,分析功率倒置算法对于多干扰的抑制性能。
假设信号来向为 (20°,80°), 存在两个干扰, 干扰来向分别为(50°,100°)和(30°,260°),两个干扰信号强度都为-90dBm,即干信比为40dB 时的方位图。若同时在(70°,320°)方向存在第三个干扰,且三个干扰干信比均为60dB 时的方向图。
从上面图中可以看出,在两个干扰情况下,能在干扰方向形成准确的零陷,在三干扰情况下能在(50°,100°)和(30°,260°)处形成准确的零陷,能对这两个干扰很好地处理,虽没有在(70°,320°)位置形成明确的零陷,但在方位70°的地方形成了零陷,对于该干扰也有一定的抑制。 出现该情况的原因是由于自由度的原因,对于N 元阵列可以形成N-1 个自由度,即信号源个数和干扰源个数总和不得大于N-1,所以四阵元抵抗三个干扰已达到了自身的最大能力。如果需要抵抗更多个数的干扰,就需要增多阵元个数。
以上借助北斗卫星信号的中心频率值和信号强度,以窄带信号为例,对于功率倒置算法的有效性进行了仿真。 北斗信号区别于GPS 信号最大的区别在于它是宽带信号,信号带宽为20MHz,之前分析四阵元得出Y 型阵元模式优于方型阵元模式, 则以四阵元Y 型阵元模式为例,分析功率倒置算法对于宽带信号的抗干扰处理。
3.3 Y 型阵宽带信号
假设信号中心频率为1268.52MHz, 信号宽带为20M, 信号功率为-130dBm,期望信号由(80°,0°)方向入射,干扰信号的信号带宽同样为20MHz,干扰信号来向为(50°,100°),干扰信号强度为-70dBm,即干信比为60dB,噪声功率为-100dBm,采样快拍数为2000。
由于目前受模数转换器件和数字信号处理器件处理速度的限制,对北斗卫星信号进行抗干扰处理时,必需先将射频接收信号下变频至中频信号再进行处理。仿真中将信号中心频率1268.52M 变化到零频,得到的具体结果如下:

图7 抗干扰前的信号
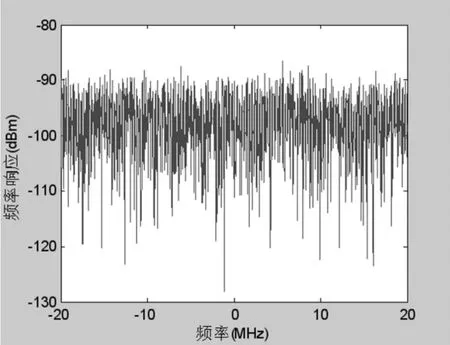
图8 抗干扰处理后的信号
从上面两个图可以明确地看出,功率倒置算法对于干扰进行了很好地抑制。 比较宽带信号情况下不同干信比的方向图如图9 和图10所示。
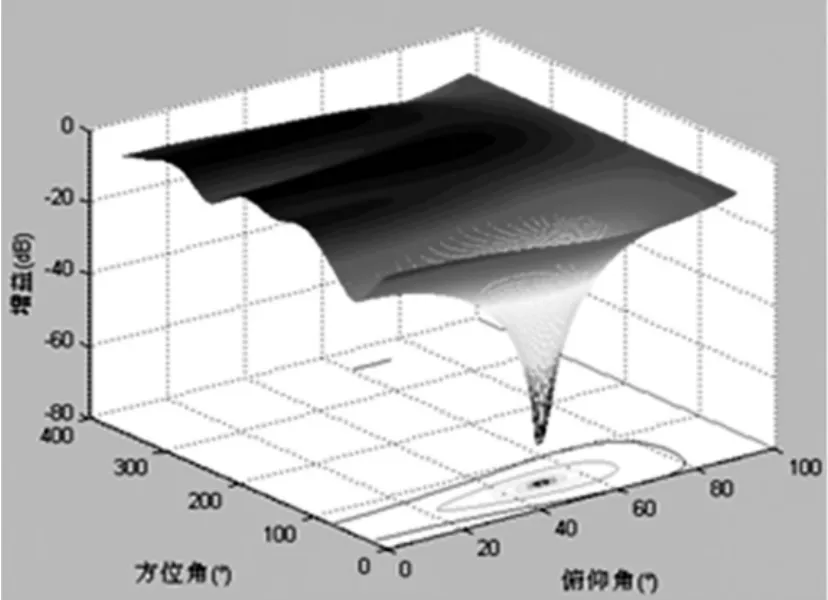
图9 干信比为50dB 的方向图
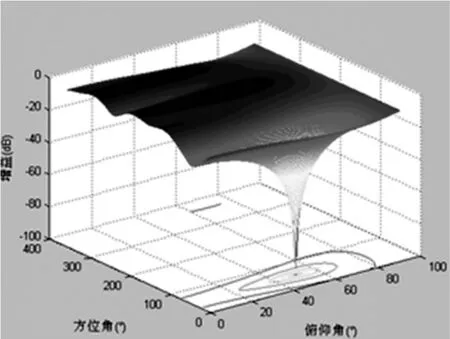
图10 干信比为90dB 的方向图
从上面两个图可以看出,不同干信比下,在干扰方向都形成了准确的零陷,同时干扰越强,零陷越深,对于干扰的抑制效果越好,和窄带信号时的特性一致。
即功率倒置算法适用于北斗卫星系统,能对压制式干扰进行有效的抑制。
4 结束语
功率倒置算法因自身特点,在抗干扰方面有着特殊的贡献,本文通过Matlab 仿真验证了该算法对于窄带信号和宽带信号干扰抑制的有效性,从而说明了它在北斗卫星导航系统抗干扰领域的适用性,仿真结果对于实际的工程应用有很好的参考作用。
[1]贠敏,葛榜军.北斗卫星导航系统及应用[J].卫星应用,2012(5):19-23.
[2]唐金元,于潞,王思臣.北斗卫星导航定位系统应用现状份分析[J].全球定位系统,2008(2):27-29.
[3]仉智权,朱畅,冯起,袁乃昌.功率倒置算法在北斗抗干扰天线系统中的应用[J].电子设计工程,2012(2):42-43.
[4]张平定,王睿.一种新的天线旁瓣对消抗干扰技术的实现[J].现代雷达,2002,24(2):80-82.
[5]廖群,郑建生,黄超.GPS 自适应抗干扰算法及其FPGA 实现[J].现代雷达,2006(4):79-81.
[6]何永前,李建璜.GPS 抗干扰接收机自适应天线阵功率倒置算法研究[J].舰船电子工程,2012(6):61-62.
猜你喜欢
科技视界(2022年26期)2023-01-16 03:50:36
电气技术(2021年3期)2021-03-26 02:46:08
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
通信电源技术(2020年22期)2020-03-27 06:48:02
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
工业设计(2016年6期)2016-04-17 06:42:54
舰船电子对抗(2015年4期)2015-03-25 03:50:17
弹箭与制导学报(2015年1期)2015-03-11 15:32:40