基于DSP的电动摩托车路况仿真检测系统研究
2013-08-10 10:22:04黄玉学丁求启
电子设计工程 2013年11期
黄玉学,丁求启,陶 敏
(1.天津科技大学 天津 300222;2.中国卫星海上测控部 江苏 江阴 214431)
由于环境问题和能源短缺,电动摩托车在世界范围成为研究热点,控制器是电动摩托车的关键技术,但它也是故障率最高的一个部分[1,2]。目前,控制器的质量控制和故障检测是电动摩托车发展中的一个主要问题,电动摩托车实验检测系统的最关键两个因素是无法完全替代实际路检和无法复现控制器故障[3-5]。一方面,因为这样的检测系统对实际行驶过程的仿真程度不够,也就无法获得跟实际路检一样的工况,导致其检测结果可信度低,往往只能起到辅助检测的作用,还必须配合实际路测才能实现可靠的质量检测。另一方面,电动摩托车控制器的故障往往是在一些特定环境中出现的,有时候是及其个别的、带有偶然性的,因此故障难以复现,检测系统同实际路检仿真程度的差距是导致这个问题的主要因素。针对这个问题,文中设计了路况仿真检测系统,可以直接对电动摩托车整车的控制目标,如动力性能,节能性能等进行全面的检测,同时也可以对电动摩托车整车系统进行全面调试和检测。
1 路况仿真系统结构设计
电动摩托车在实际的行驶过程中,有许多的信息,其中有两个主要的信息反映了控制器的当前工作状态,它们是控制器主回路电流和电机当前转速[6]。控制器主回路电流是电动摩托车在有阻力行驶过程中的主要信息,控制器的发热、冲击主要来自于电流变化,这也是控制器最重要技术指标。电机的转速是电动摩托车在滑行行驶过程中的主要信息。
根据系统要求以及对电动摩托车行驶过程中电机和控制器的状态分析,设计电动摩托车路况仿真检测系统的结构,其如图1所示。电动摩托车仿真检测系统主要由磁粉制动器、有刷直流电机、无刷直流电机和控制核心板四个部分组成。无刷直流电机就是电动摩托车所用的电机,由系统所检测的对象控制器进行驱动;磁粉制动器和无刷直流电机同轴安置,利用磁粉制动器实现对无刷直流电机的加载;有刷直流电机与无刷直流电机通过皮带连接,实现对无刷直流电机的拖动模拟滑行实验。控制器在整个运行过程中的电流信号、电机的转速等等都由控制核心板检测,然后核心板根据一定的控制算法将这些信号处理,得到输出信号,利用输出信号控制磁粉制动器和有刷直流电机工作,形成一个闭环系统。
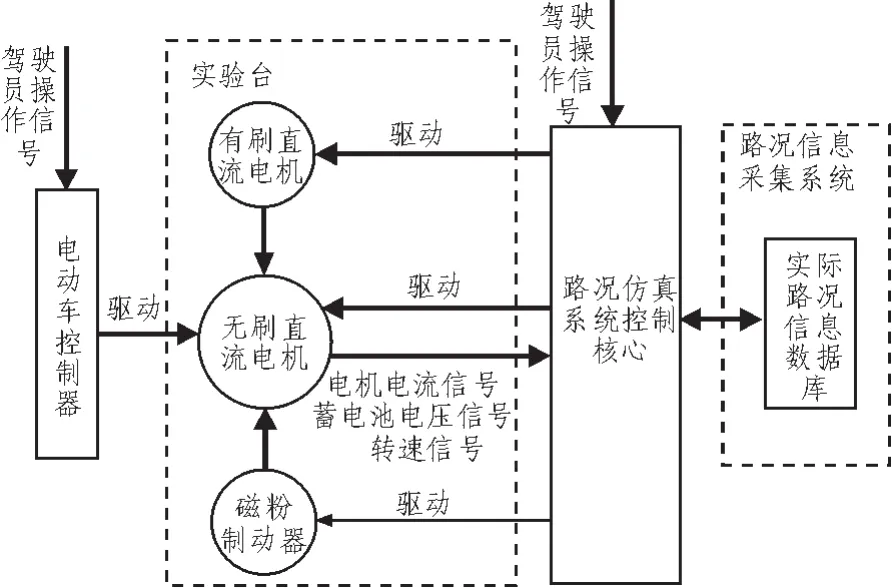
图1 路况仿真检测系统结构图Fig.1 Structure diagram of the real-road condition simulation test system
2 路况仿真检测系统控制核心板硬件设计
2.1 控制核心板总体结构
路况仿真检测系统控制核心是系统的控制部件,用来驱动实验台工作,实现对电动摩托车实际路况的实验室内仿真,以替代实车路检,整个控制核心是依赖于实际路况信息数据库来运行的,控制核心板首先根据实验人员的命令从EEPROM中读取想要进行检测的路况数据,并将其暂存到RAM区中,这样才能满足系统运行时候数据读取的速度要求,然后再根据实验人员的指令进行仿真检测实验。本控制核心板是由TI公司生产的TMS320LF2407A型DSP(数字信号处理器)芯片为主控芯片的,用于采集输入信息,计算和输出各路控制信号,核心板总体框图如图2所示。
2.2 信号调理与隔离电路
核心板的驱动信号由DSP芯片输出,该驱动信号只有+3.3 V的幅值,为弱电信号,要对实验台工作部件进行强电控制就需要进行隔离,以免造成电磁干扰甚至造成击穿,本核心板选用4504型高速光耦和PC817光电耦合器件,可以实现信号隔离,防止电磁干扰,同时还可以起到电平转换的调理作用。实现DSP电压的+3.3 V同外围器件+5.0 V的互相转换,既保证外围电路的正常工作,又保护DSP安全工作不被烧毁。
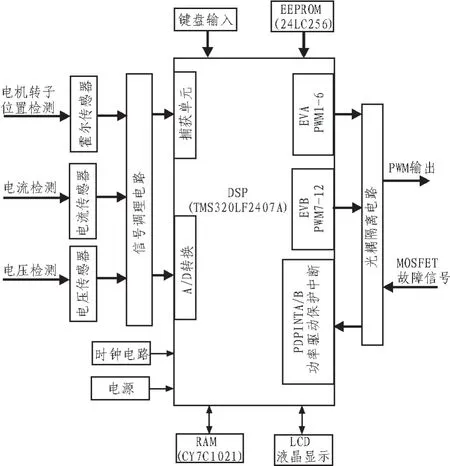
图2 仿真检测系统控制核心板框图Fig.2 Structure diagram of the control core-board of the simulation test system
2.3 电机位置信号检测电路
无刷直流电动机的位置信号是其控制的主要反馈信息,只有明确转子的当前位置状态,根据电动机的导通机制,才能决定下一步的转子三相绕组的导通逻辑,而且可以根据其变化计算电机转速。检测电路如图3所示。一般霍尔位置传感器是集电极开路输出,所以要在检测环节加上拉电阻。另外,对于编码信号要根据检测波形采取一定的硬件滤波和软件防抖措施。经过电阻上拉和电容滤波后的信号被送到PC817光电耦合器件上的1口,经过+5 V到+3.3 V的电平隔离转换送入TMS320LF2407A的GPIO口,作为对无刷直流电动机导通逻辑编程的信号,以及用于电机转速的检测。
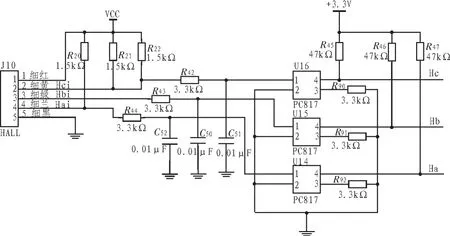
图3 霍尔位置检测电路图Fig.3 Hall position detection circuit
2.4 有刷直流电机驱动电路
控制核心板用于有刷直流电机的驱动电路采用典型的BUCK降压斩波电路,如图4所示,由VF7和VF8组成驱动桥,上管VF7用于PWM关断时候的续流,保证电机能平稳工作,下管VF8由PWM控制,通过PWM占空比的改变实现降压斩波。采用IR2103芯片进行MOSFET管驱动,DSP输出的PWM信号通过光耦器件后送入IR2103的输入端,在IR2103的输出端就可以获得占空比相同、幅值为+15 V的MOSFET管驱动信号,调节DSP输出PWM信号的占空比大小就可以调节有刷直流电机的转速。
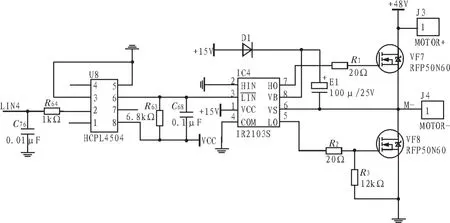
图4 有刷电机驱动电路图Fig.4 Driving circuit of the brush motor
2.5 磁粉制动器驱动电路
控制核心板对磁粉制动器的驱动采用图5所示的BUCK斩波变形电路,采用75N75型MOSFET管作为DC/DC变换器的开关管,利用IR2103芯片驱动MOSFET管,DSP输出的PWM信号通过光耦器件后送入IR2103的输入端,在IR2103的输出端就可以获得占空比相同,幅值为+15V的MOSFET管驱动信号,调节DSP输出PWM信号的占空比大小就可以调节磁粉制动器的制动力矩。
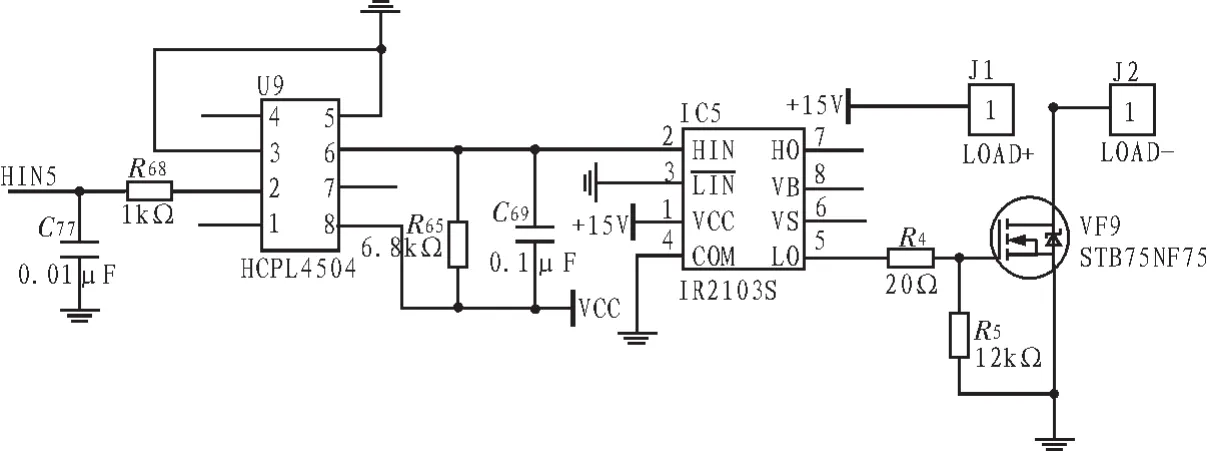
图5 磁粉制动器驱动电路图Fig.5 Driving circuit of magnetic powder brake
2.6 无刷直流电机逆变驱动电路
控制核心板用于无刷直流电机驱动的逆变电路为三相全桥式逆变器,采用75N75型MOSFET管作为降压驱动DCDC变换器的开关器件。来自DSP的输出信号通过驱动电路驱动各功率开关管的导通与关断,使转子各相绕组按一定次序导通,转子相电流随转子位置的变化按一定的逻辑换相。必须保证在功率管完好无损的前提下能够实现无刷直流电机的顺利换向,尤其在霍尔信号有一定的干扰的情况下能无差错的驱动。
2.7 电流采样电路
控制核心板的电流采样使用LEM公司生产的LT58-S7型电流传感器,它是一种采用霍尔原理做成的闭环补偿型电流传感器,具有出色的精度、良好的线性度、低温漂性、良好的反应时间、宽频带、抗干扰能力强、强电流过载能力,转换率为1:1 000,精度在±0.8%以内。
利用电流传感器获得的电流信号并不能直接接入DSP进行使用,因为一方面直接得到的电流信号包含有很多的干扰信号,需要经过一套电路进行滤波才能获得清晰可用的电流信号,另一方面为了保证DSP安全,电流信号在送到DSP以前必须经过电压区域的映射,即将采样电阻获得的0~5 V电压线性映射到0~3.3 V之间。
3 路况仿真检测系统控制核心板软件设计
控制核心板软件的作用是初始化系统的各模块、按照各种逻辑调度和安排各个任务工作,来实现系统需要的各种功能。系统各模块的初始化包括DSP内核的初始化,数字信号输入输出(DIO)模块的初始化,定时器模块的初始化,模数转换(ADC)模块的初始化,以及PWM输出模块的初始化和液晶驱动芯片HT1621的初始化和启动系统的各种中断和功能。系统初始化完成后进入等待定时器周期中断循环状态。
系统程序设计了一个工作状态标志state_flg和一个仿真对象标志work_state。当state_flg等于FZ_STATUS时,程序工作于仿真状态,在仿真状态下根据work_state的值又有3种工作模式,当work_state等于PP_STATUS时,程序工作于爬坡路况仿真状态,当work_state等于XP_STATUS时,程序工作于下坡路况仿真状态,当work_state等于ZH_STATUS时,程序工作于综合路况仿真状态。当state_flg等于SZ_STATUS时,程序工作于设置状态,系统程序的流程图如图6所示。
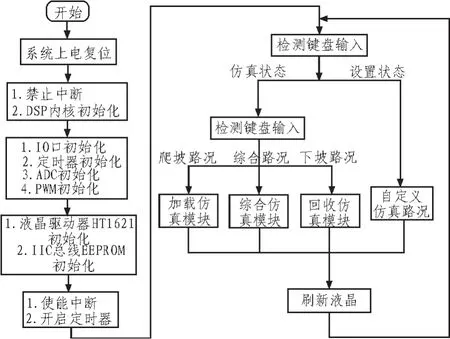
图6 系统程序流程图Fig.6 Flow chart the software design
4 仿真实验
实验对象为博源电摩托车及其HIC4816-EDD型控制器,使用该电动摩托车对实验室附近典型路况进行路况信息采集,实验条件为水泥路面,坡度15°,晴朗无风,小转把快速启动实验。结果如图7(a)所示,然后又在文中所设计的路况仿真检测系统进行了仿真实验,如图7(b)所示。
与实际采集结果进行对比,计算仿真与实际采集结果的误差为:
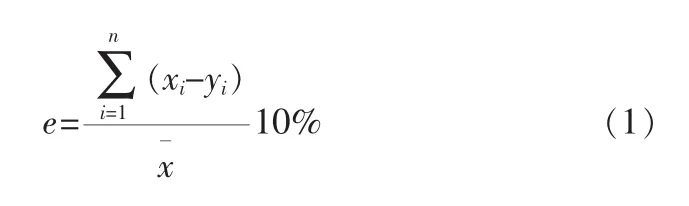
式中:
xi——图7(a)对应路况下的实际路况信息数据点,每隔300 ms一个;
yi——图7(b)中每隔300 ms取点所获得的电流值;
x——图7(a)对应路况下的实际路况信息数据点的均值。
5 结 论
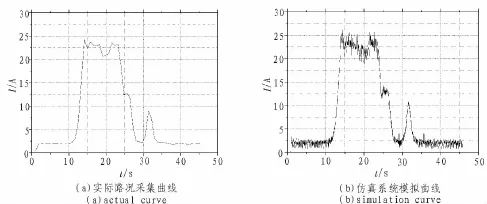
图7 实验曲线Fig.7 Experimental curve
文中设计了一套电动摩托车路况仿真检测系统的方案,并搭建了实验台,利用磁粉制动器和有刷直流电机实现了对电动摩托车的爬坡和下坡制动的仿真检测,由实验结果可知,仿真检测系统已经可以实现实验室内对电动摩托车实际行驶过程的仿真,为了能够达到实验室内完全准确的对大部分实际行驶状况的仿真,需要利用实车实验对路况信息数据库进行不断的积累,在积累的数据的基础上可以通过人为的组合处理来建立更广的数据库,形成一个良性循环。
[1]崔万安.电动自行车[M].北京:机械工业出版社,2001.
[2]王晓伟,潘双夏,陈入领.电动自行车检测系统的方案设计[J].现代机械,2003(1):32-35.WANG Xiao-wei,PAN Shuang-xia,CHEN Ru-ling.Design of electric bicycle testing system[J].Modern Machinery,2003(1):32-35.
[3]傅超二,潘双夏,胡骁.电动自行车整车性能计算机检测系统的研究[J].机械设计与制造,2003(2):16-17.FU Chao-er,PAN Shuang-xia,HU Xiao.Thedesignof electric-bicycle testing system[J].Machinery Design &Manufacture,2003(2):16-17.
[4]王晓玲,王玉玲,张青.电动自行车整车性能自动检测系统[J].现代制造工程,2006(6):25-29.WANG Xiao-ling,WANG Yu-ling,ZHANG Qing.Design of electric bicycle performance auto-testing system[J].Modern Manufacturing Engineering,2006(6):25-29.
[5]胡骁.新型电动自行车整车性能自动检测平台的研究与开发[D].杭州:浙江大学,2003.
[6]胡宝兴,贾颖莲,姜伟.电动自行车用无刷直流电动机控制器的设计[J].微特电机,2006(12):29-32.HU Bao-xing,JIA Ying-lian,JIANG Wei.Design of brushless DC motor controller used in the electric bicycle[J].Small&Special Electrical Machines, 2006(12):29-32.
猜你喜欢
中国交通信息化(2023年1期)2023-03-18 02:01:58
大电机技术(2022年5期)2022-11-17 08:12:56
小天使·一年级语数英综合(2021年3期)2021-05-08 06:10:31
小学生学习指导(爆笑校园)(2018年5期)2018-09-10 02:47:32
传媒评论(2018年11期)2018-02-16 07:32:00
电子制作(2017年1期)2017-05-17 03:54:12
智慧少年(2016年2期)2016-06-24 06:12:54
中国交通信息化(2015年3期)2015-06-05 03:53:32
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10