地面与井中观测条件下的微地震干涉逆时定位算法
2013-08-09 09:30:54王晨龙程玖兵
地球物理学报 2013年9期
王晨龙,程玖兵*,尹 陈,刘 鸿
1 同济大学海洋与地球科学学院 海洋地质国家重点实验室,上海 200092
2 中国石油川庆钻探工程有限公司地球物理勘探公司,成都 610213
1 引 言
地震定位是地球物理学领域中最基本和最重要的问题之一.尤其在地震学中,地震定位问题被广泛地讨论和研究.近年来非常规油气资源(如致密砂岩气、页岩气与煤层气等)的开发过程中,通过液压致裂等开采手段提高油气藏渗透率已经成为一个普遍的开发工艺.在此过程中油藏工程师可以通过定位压裂诱导的微地震,刻画地下裂缝属性(包括裂隙走向、密度与维度等)、分析断裂模式与评价压裂效果[1-6]、以及反演震源机制[7-10]等,乃至监测油气藏的开采过程[11-12].由此地震定位问题被引入到非常规油气资源勘探开发中.
传统的地震定位方法往往需要从地震记录中获得清晰的纵横波走时信息,要求地震记录具有较高的信噪比.但在实际微地震观测中,低信噪比是观测数据的普遍特征,且观测数据量巨大,因此传统的地震定位手段受到了很大的限制.一些学者[13-16]提出不同的数据再处理方法,并从信噪比提高后的微地震数据中拾取出走时信息,进而利用传统方法进行定位.同时近年来,人们借鉴地震勘探中的偏移成像原理也发展了不需要拾取震相走时信息、适用于低信噪比数据的类偏移定位方法.这类方法认为微地震源类似偏移成像中的成像点,相应的定位过程可以分为两步,即首先延拓观测数据“重构”地下波场,之后施加合适的“成像条件”得到震源位置和激发时间.其中有代表性的工作包括:Gajewski[17]和McMechan[18]等借鉴逆时偏移原理,通过延拓观测记录“重建”地下波场,并施加“成像条件”进行定位.Zhebel[19]、Gajewski[20]和 Chambers[21]等利用射线理论偏移成像中输入道的原理,叠加绕射波场实现震源定位.Rentsch[22]提出了基于高斯射线束理论的聚焦定位方法.
逆时延拓定位方法除了不需要拾取震相走时,还利用了整个观测网络的数据信息作为输入,不同检波器、不同方向的冗余波场信息能够类似于多次覆盖叠加方法一样很好地应对低信噪比问题.针对这类方法许多学者还在寻求不断的改进.Artman[23]等采用互相关成像原理对多分量中的纵、横波数据分别进行定位并判断震源类型.Witten[24]通过在数据域估计噪声模型,同时逆时延拓噪声模型和微地震数据,最后通过阀值压制逆时定位中的假象.Sava[25-26]在二维声波成像条件下初步分析了干涉成像原理在逆时定位中的应用潜力.
正如逆时偏移一样,通过波场延拓“重构”地下地震波场需要比较精细的速度模型.在实际应用中,因速度模型不准确、观测系统稀疏等因素会导致定位结果存在偏差或假象.本文将深入研究逆时聚焦定位干涉成像原理,针对单分量(声波方程)和多分量(弹性波方程)合成的地表和井中微地震记录,检验定位效果与方法特点,最后结合四川某区实际射孔资料初步试验说明该方法的可行性.
2 微地震干涉逆时定位原理
微地震逆时定位原理是以观测到的微地震数据作为输入数据,利用与介质假设相匹配的波动方程逆时延拓波场,通过数值方法逆向“重构”微地震波场在地下的传播过程.利用不同观测点记录到由同一震源产生的数据必然具有相同的激发时间这一原理并施加适当的“成像条件”获取震源属性(空间位置、激发时间等).以声波方程为例,逆时传播地表采集到的波场:

式中x,y,z为空间坐标,T为总时间长度,t为逆推方向的时间,D为地表采集数据.弹性波方程相关公式与之类似.与逆时偏移不同的是,地震定位问题并不知道震源的激发时间,并且没有震源点的下延波场,所以在重构波场的过程中,不能简单地采用偏移中的零时刻互相关“成像条件”定位震源位置.其做法通常是在一定时窗范围内选取重建波场能量最大的点视为推定的震源,相应的传播时刻为推定的震源激发时间.其原理大致可以如图1所示,其中红色五角星指示了微地震信号聚焦的空间位置与时刻,彩色曲面为波前扩展或收缩面,曲面颜色从蓝色到红色反映了能量的逐渐增强.值得注意的是这里的聚焦能量并不是震源所释放的能量,故不能直接用来评定震级.该方法是在一定时窗范围内进行震源定位,为了所有的观测点都能记录到震源响应,数据窗口长度一般从压裂时刻开始或者可以采用一些常用的P波初至自动识别方法(STA/LTA、频谱分析等)识别的时间作为时窗起始时刻,在均匀常速介质下选取如公式(2)所示的时间长度.

图1 二维微地震逆时定位原理示意图红色五角星为震源位置及激发时间,颜色从蓝到红反映能量的增强.Fig.1 Sketch of 2Dmicro-seismic reverse modeling location principle Red star marks the source position and the trigger time,color from blue to red indicate the increasing energy.

其中gn为观测点空间坐标,mi为定位目标段潜在的震源点.该时间窗口可以保证能够采集到完整的震源信息.为了保证能量能够聚敛到震源位置,波动方程逆时延拓时长可保守选为2twindow.Gajewski[17]和McMechan[18]在理论模型上证明了这种方法的可行性.但该方法在处理实际数据时,通常会遇到很多干扰信息.这些干扰可能来源于不准确的速度模型、低品质的数据或是观测稀疏等因素.通过适当的数据处理方法可以部分减弱以上因素造成的定位假象和能量不聚焦问题.
本文参照Wigner分布原理对微地震数据做处理,该过程可以认为是一种滤波[27].以标量波数据为例,干涉定位方法的实现通常有两种形式,一种是在数据空间域对观测数据做如下的类WDF(Wigner Distribution Function)数据变换:
式中x表示地表检波器坐标,s表示某个特定震源,D(x,s,t)表示地表x处记录到由震源s产生的地震记录,Dx(x,s,t)表示干涉处理后x处的地震记录,X、T表示选取的类 Wigner分布的窗口大小.通过干涉滤波能够明显增强数据域有效信号的相干性,从而压制定位假象,并得到更加聚焦的定位效果.
另外一种处理方法是在成像空间域对数据做干涉处理,相应的类WDF处理公式为:

式中y表示成像空间中的每个成像点坐标,W(y,t)表示成像空间内y点在时刻t的波场值,I(y,t)表示干涉处理后的空间域结果,Y、T表示选取的类Wigner分布的窗口大小.由于计算成本的限制,该方法通常在逆时定位方法确定激发时间t0后,施加成像条件Pa(y)=I(y,t=t0)对震源激发时刻的成像空间波场做相干处理,压制背景噪声,突显聚焦后的震源位置.在计算条件允许的情况下,也可灵活地在逆时定位方法确定的激发时刻前后选取时窗做干涉定位处理.
第一种干涉滤波方法要求观测数据空间分布是规则的,同时在同一时窗内不能出现两个微地震震源,而在实际微地震观测(如井中观测、地面“米”字型观测等)和数据实际情况往往不满足这些条件.故本文采用第二种干涉滤波方法,由于逆时波场传播采用方形网格有限差分算法,即保证了即使采集数据不规则,空间域的类WDF干涉处理同样可行.
目前微地震定位的工程实践中,往往采用多分量检波器,因此记录了丰富的多波型振动矢量波场,既有助于震源定位,还方便分析震源机制[7-10]甚至反演地下介质弹性参数等.本文拟把干涉逆时定位方法扩展到多分量数据情况.矢量波定位原理和标量波大致相同,但逆时延拓矢量波数据获得的波场更加复杂,计算代价也更高.在三维情况下,通常使用两个水平分量和一个垂直分量(即Ux、Uy和Uz)代表矢量波场.因为震源位置确定主要依据波场的能量信息,因此矢量微地震数据的干涉滤波采用如下公式:

(5)式中y表示成像空间中的每个成像点坐标,Ux(y,t)、Uy(y,t)和Uz(y,t)分别表示成像空间内y点在时刻t的两个水平分量和一个垂直分量,I(y,t)表示干涉处理后的空间域结果,Y、T同样表示选取的类Wigner分布的窗口大小.
如同前文所述,通常在通过逆时定位方法确定好激发时间t0后,施加成像条件Pe(y)=I(y,t=t0)获得震源的“像”.这里涉及如何选取类 WDF干涉处理的空间与时间窗口大小的问题(注意不是逆时定位的时间窗口),选取原则是不要使得相邻主要震源发生交互干扰,因而要综合考虑波场延拓空间大小、速度分布等客观因素.经过多次实验得到(本文选取的窗口大小为:空间窗口40m,时间窗口为0.007s).通常来说,多分量数据的干涉窗口选取条件要比单分量数据严苛.在单分量和多分量数据多源定位中施加干涉条件和逆时定位中的多源定位原理没有冲突.
3 理论模型定位分析
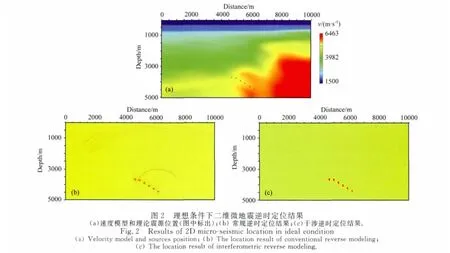
理论模型试验采用西部某地区三维背景速度结构,二维试验选取其中某条测线(图2a).模型大小为1001×500网格,空间采样均为10m,纵波速度介于1500~6463m/s之间.下面通过地面与井中二维、三维模拟观测数据测试本文干涉逆时定位算法,说明其特点与优势.
3.1 地面二维单分量数据
在二维地面观测情况下,理论设定六个震源,如图2a中速度模型中标识的六个点,坐标分别为P1(4600,3750),P2(4900,3800),P3(5200,4000),P4(5500,4200),P5(5800,4400)和 P6(6100,4600),激发时刻分别为0.05,1.16,2.23,3.38,4.45,5.53s.激发Ricker子波主频为30Hz.在地表采集8s的地震记录,检波器空间间隔为10m,地震记录时间步长为0.75ms.首先在理想条件下(正确的速度模型、无噪声)采用传统的逆时聚焦定位方法,以声波方程有限差分算法进行波场延拓,以观测波场作为地面边值条件,数值计算边界采用PML(Perfectly Matched Layer)吸收处理.定位结果如图2b所示,无论是震源位置还是激发时间都与理论参数完全一致.图中较弱的弧形能量是定位时间较前的震源时其它未聚焦震源的波场能量.当采用干涉逆时聚焦定位方法时,得到的震源坐标与激发时间与理论参数也完全一致(图2c),说明该方法与传统方法相比并没有引入新的误差,且借助干涉滤波算法大幅度压制了其它假象的影响.
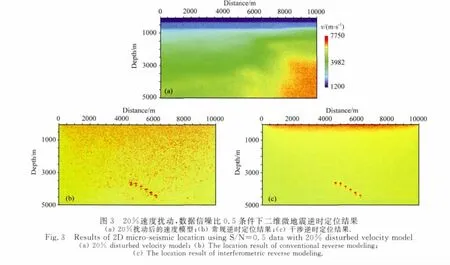
实际数据处理中不可能满足理想条件,即存在速度模型估计不准、数据含有噪声等问题.下面就此对干涉逆时定位算法的适用性进行测试.首先在该速度模型中加入±10%的扰动,震源参数和采集参数与前面试验完全一致,在该条件下分别采用信噪比(S/N)为5、1和0.5的数据进行逆时定位.其中采用干涉定位条件后的定位误差如表1所示,其中空间误差用网格点数来表示,定位结果大于实际坐标为正,反之为负,时间误差以s为单位,定位晚于实际时间为正值,反之为负值.同样测试了在速度模型中加入±20%扰动后,干涉定位算法在不同信噪比数据下产生的定位误差(表2),可以看出随着震源深度的增加和模型误差的增大,定位精度随之下降.很有意思的是,在都能够合理定位的情况下,数据信噪比对定位精度的影响不是十分明显,这表明逆时聚焦定位方法具有很好的抗噪能力.类似的现象也存在于基于射线理论定位的类偏移方法中[20].
在实际观测微地震资料中,数据信噪比往往很低,所以文中S/N=0.5更接近实际情况.图3为在速度存在±20%随机误差时,信噪比为0.5的数据的逆时定位结果.可见,干涉逆时定位算法能够改善震源能量聚焦效果,一定程度上提高了定位的空间分辨率,同时还有效地压制了噪声、速度误差等因素的影响.
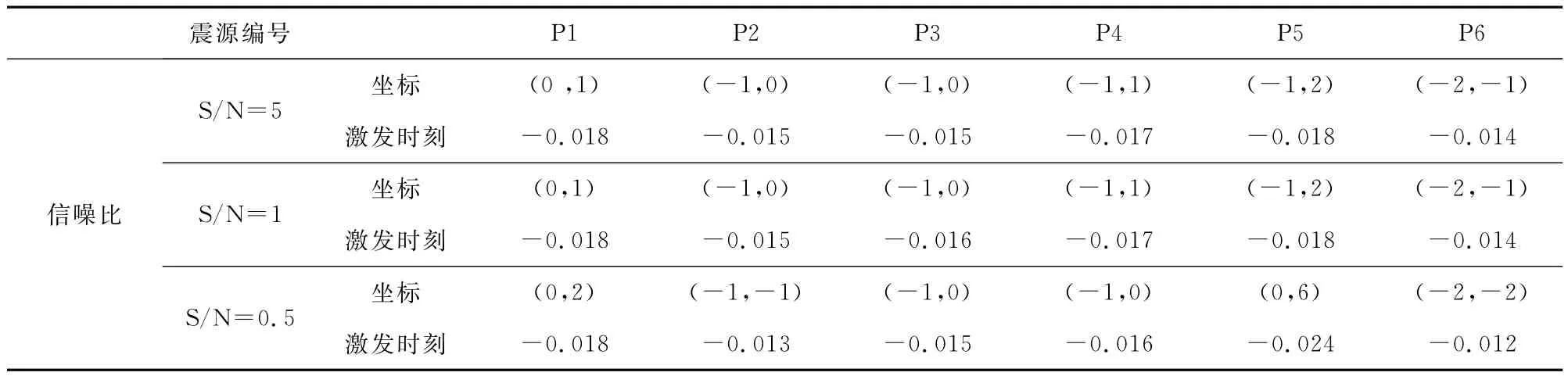
表1 二维干涉逆时定位方法在±10%速度误差模型、不同信噪比情况下的定位误差Table 1 Location errors of reverse modeling using±10%velocity model and different signal to noise ratio
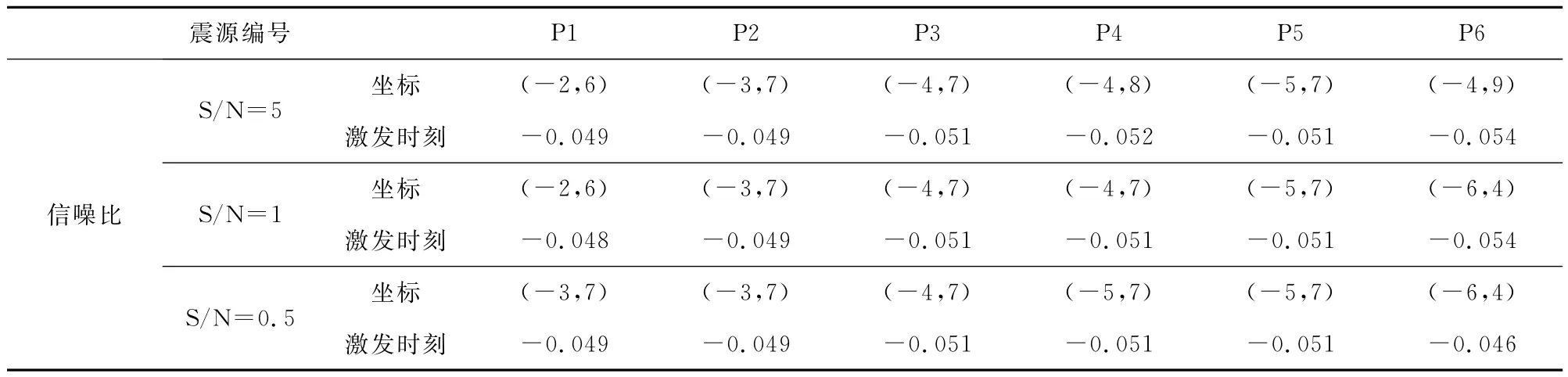
表2 二维干涉逆时定位方法在±20%速度误差模型、不同信噪比情况下的定位误差Table 2 Location errors of reverse modeling using±20%velocity model and different signal to noise ratio
3.2 地面三维单分量数据
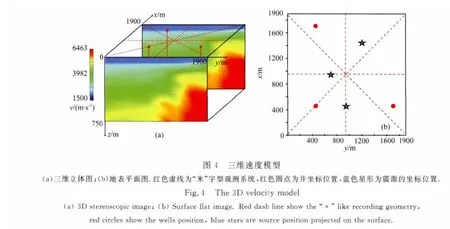
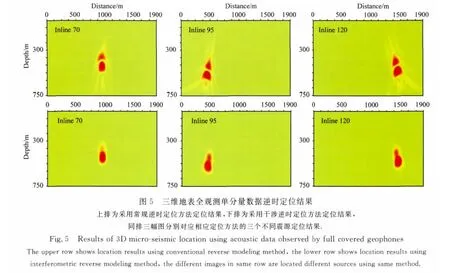
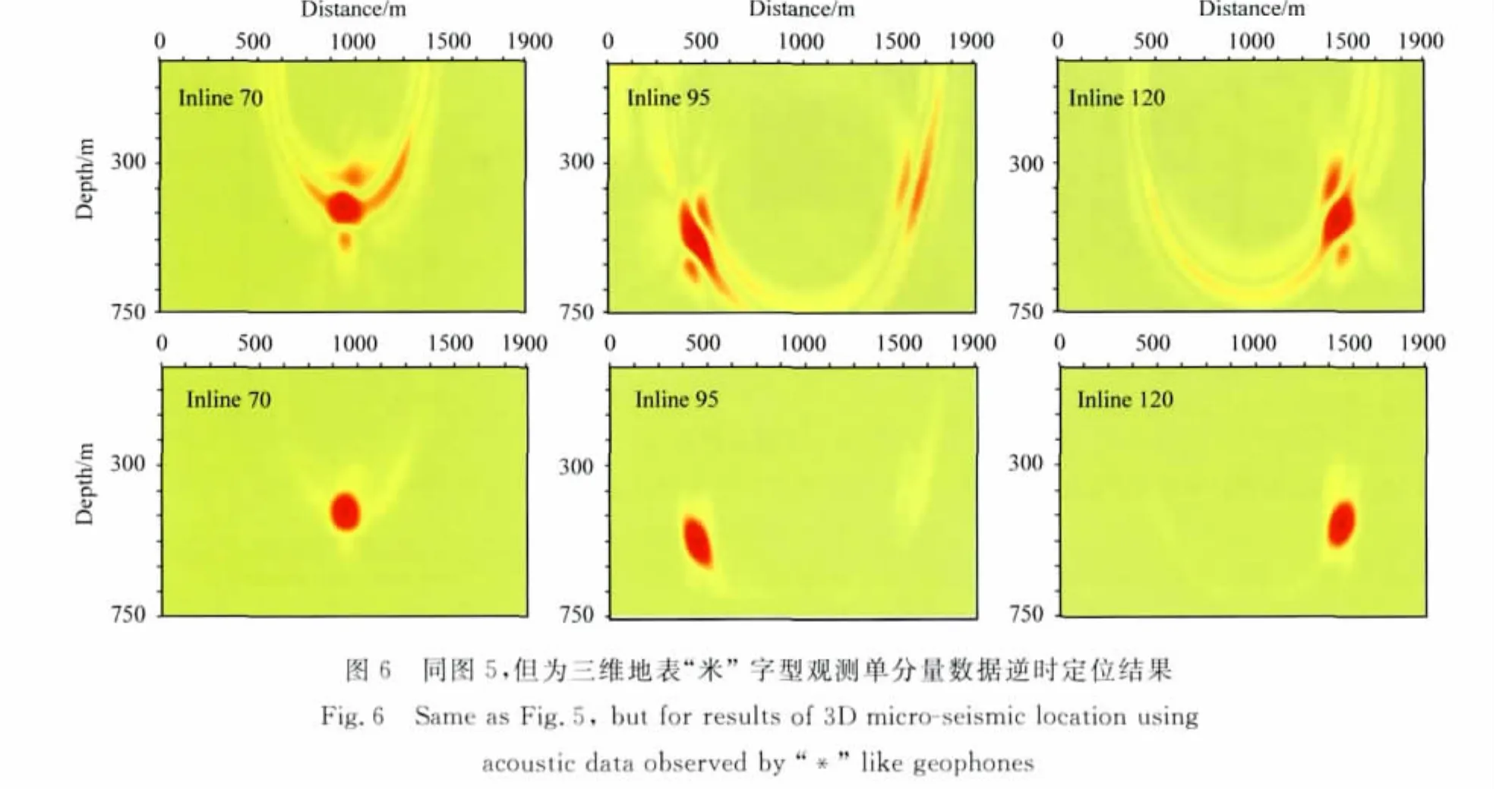
在实际的微地震观测中,二维定位算法显然不能满足工程需求.基于单分量检波器的三维定位方法在原理上和二维算法并没有太大出入.但显然三维的波场信息以及检波器排布形态更加复杂.理论模拟三维微地震观测采用插值后的西部背景速度场,范围为190×190×75,模型网格间隔为10m(图4a),图中用前后两个二维速度模型体现三维概念.设定三个理论震源,其空间坐标分别为s1(1450,1200,500),s2(950,700,450),s3(450,950,550),激发时间分别为(0.01s,0.515s,1.015s).采用实际微地震中常用的全覆盖和地表“米”字型(如图4a,4b中红色虚线)这两种采集方式,采集空间间隔都为10m,时间步长为0.5ms,总采样的时间长度为2s.首先采用地表全覆盖的观测数据作为边值条件,数值计算同样采用PML做吸收处理,并在模型中加入10%的速度扰动.其定位结果如图5所示,截取了不同震源对应的inline方向切片展示定位结果.干涉逆时定位误差采用3.1节中的表示方法分别为s1(0,0,-1),s2(0,0,-1)和s3(0,0,-1),时间误差分别为(0.033s,0.032s,0.0305s).可以看到干涉逆时定位方法能够有效地压制逆时传播中由于观测孔径受限,和速度模型误差引起的定位能量干扰,使得定位能量更加聚焦.随之采用“米”字型的采集数据作为输入边值条件,其定位结果如图6所示,干涉逆时定位误差分别为s1(-1,0,-2),s2(0,0,-2)和s3(0,0,-1),对应的时间误差分别为(0.0435s,0.041s,0.036s).图中可以看到“米”字型的观测数据更加稀疏,从而在逆时传播中形成了很多未干涉掉的波场能量(如图6中的弧形同相轴),而干涉逆时定位方法进一步在一定程度上压制了由于三维稀疏观测引起的能量干扰,提高定位结果的聚焦性.同时本例中采用志强X5675处理器,其中地面数据定位计算耗用机时大约为180min左右.
3.3 地面三维多分量数据
三维多分量数据的波场信息更加复杂,定位算法需要联合考虑Ux、Uy和Uz三个分量的作用.这里采用类似公式(5)提供的算法进行干涉定位.模型网格范围依旧为190×190×75,网格间距均为10m,其中纵波速度和单分量模拟中一致,横波速度取vS=vP/介质采用常密度2300kg/m3(图4a).在速度模型中加入10%的随机扰动.同样地表观测模拟采用微地震监测中通常采用的“米”字型采集方式(如图4a,4b中红色虚线)和地表全覆盖方式两种,两种采集方式中检波点之间的距离都为10m.采用三维弹性波速度应力方程交错网格高阶有限差分算法进行波场延拓.震源参数和单分量模拟中完全一致,总采样时间长度同样为2s.
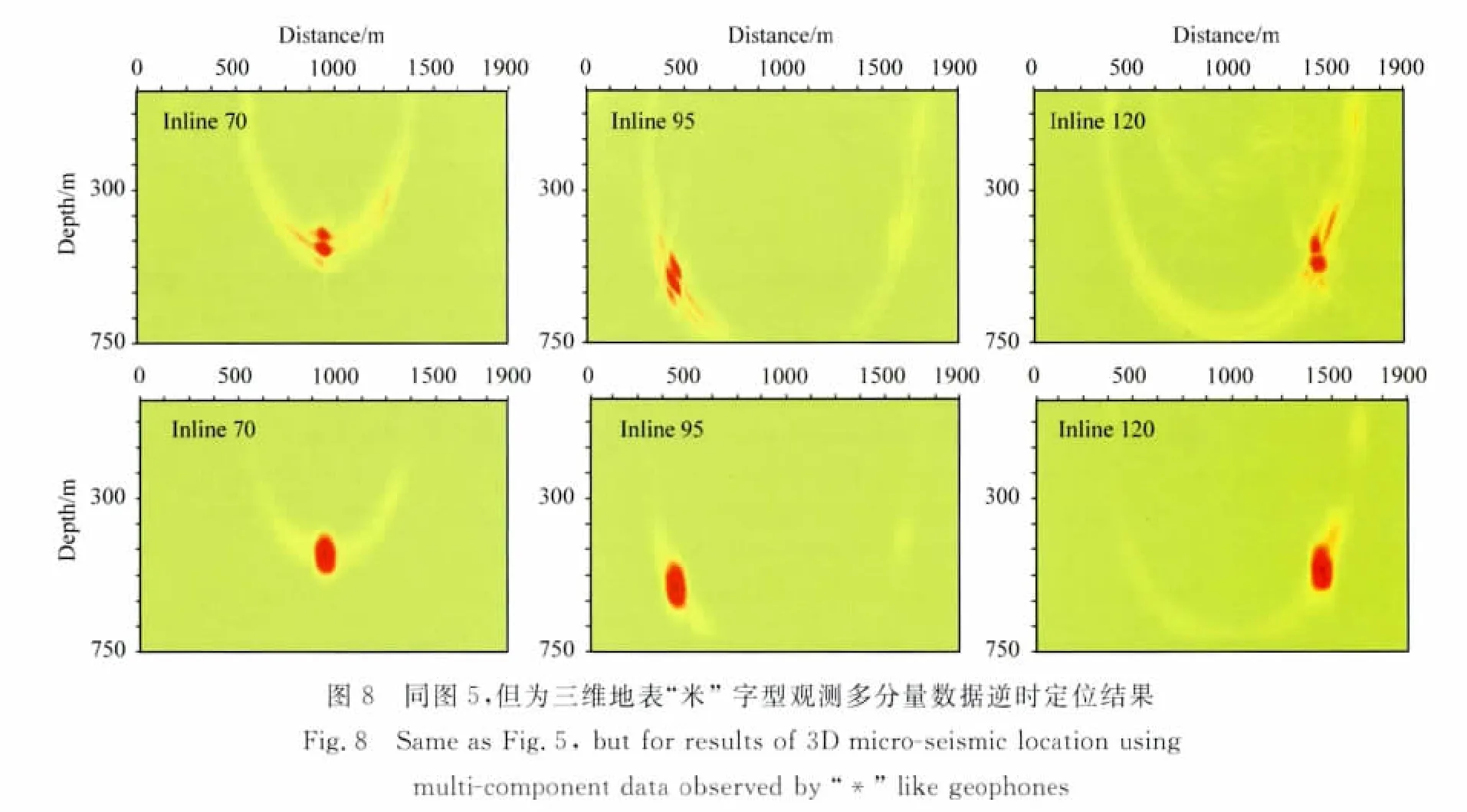
首先利用全地表观测方式,共记录36100个采样点.采用3.1节中的误差表示方法,干涉逆时定位算法得出相应的空间误差分别为s1(0,0,-1),s2(0,0,-1),s3(0,0,-2),时间误差为(-0.05s,-0.05s,-0.07s)(图7).然后利用“米”字型观测方式,记录760采样点,其相应的空间定位误差分别为s1(0,0,-2),s2(1,0,-1),s3(0,0,-2),时间误差为(0.03s,0.025s,0.02s).(图8).可见,在三维多分量逆时定位中,全地表观测定位虽然在震源位置附近出现两个能量极值点,但定位结果噪音低,效果较好.在工程实践中通常采用“米”字型观测方式,稀疏采集依旧会导致一些未干涉掉的残余能量.采用干涉滤波算法后,残余能量同样得到了压制,而且震源能量更加聚焦(每个震源对应一个能量极值点).

3.4 井中三维多分量数据
三维多分量井中观测在微地震数据采集中也非常普遍.它是把高灵敏度的检波器放到井中去采集微小震动产生的信号,其好处在于数据信噪比高、微地震信号衰减小,能够采集到更多的有效信号.相比较于地面观测,井中逆时聚焦定位可以只利用局部较精确的速度信息,对上覆地层速度的精确性要求不高.文中采用全波动方程(即双程波方程)进行逆时延拓,由于全波动方程波场传播的方向特性,数值计算的波场能量并不会只沿着其传播过来的方向反传播回去.因此单口垂直井数据的定位结果中除了真实的震源外,还会出现一个与之对应的虚震源(图9a).同时由于几何扩散等因素,相比较于定位聚焦的能量,井所处位置上的能量可能更高,在搜索能量极值点定位时就集中在井附近的空间位置上.因此,单井数据微地震源定位时要注意排除这些假象.为了降低虚震源的影响并提高微地震定位精度,建议在压裂区周围布设多口井进行联合观测与定位.图9通过二维情况下单井与双井观测的定位效果对比来支持这一观点.
在三维多分量井中模拟观测数值试验中设定的震源位置、激发时间与前文地表观测情况完全一致,三口井的坐标分别为(450,450)(1700,450)和(450,1700),深度750m,每口井的检波器数目均75个,间隔为10m.震源分别布设在两口井连线上、三口井连线内部以及三口井连线之外(见图4b).数值试验定位空间误差分别为s1(0,0,-1),s2(0,0,0)和s3(0,0,-2),时间误差分别为(0.0025s,0.0025s,0.002s).可见,这种观测系统可以保证两井连线上、三井之间的以及与三井连线外(不太远)的震源的空间定位.图10从三维聚焦数据体中截取了三个不同震源所在的inline切片,可以明显看出在三井之间的震源定位结果比较干净,分辨率更高.对比上下两行图可看出干涉逆时定位算法能够在一定程度上压制井中数据逆时传播产生的干扰,突出真实震源对应的能量极值点.

最后结合地面“米”字型观测和井中地震数据,进行井地联合观测定位试验.其中地表和井中观测条件,以及震源参数和前文中提到的完全一致.其空间定位结果和理论震源位置完全一致,误差分别为s1(0,0,-2),s2(0,0,-1),s3(0,0,-2),时间误差为(0.043s,0.043s,0.0435s).图11中展示了井地联合定位中,主要的定位能量还是来自于地表,井中数据能量贡献较弱,而且在震源位置附近还会产生一定的能量干扰.从下排与上排定位结果的对比中可以看到,干涉逆时定位方法能够起到压制假象,聚焦能量的效果.在实际应用中,井中多分量数据通常具有较高的信噪比和较小的数据量,一般也可以采用拾取震幅的定位方法,分析较精细的信号极化特征.
三维多分量波场延拓耗用机时较多,其中地面数据定位、三井联合定位以及井地联合定位计算耗用机时相当,大约为1300min左右.
4 实际射孔数据定位分析
采用本文干涉逆时成像定位方法对四川某地区实际射孔资料进行定位(真实射孔位置已知).该工程试验的三维观测系统如图12a所示,为“米”字型地面观测,射孔操作的垂直井位于中心,其水平坐标为(2120m,2107m),射孔深度为2036m.共8支观测臂对称分布,臂长1820m,共976道接收,相当于4条中间空缺的二维测线,每条测线共244道,道间距15 m,总长度为4240m左右,中间空缺600m.检波器最大高程为760m,最低高程为520m.试验中首先以最大高程为参考基准面,用地表速度(4900m/s)对数据做静校正,并采用去噪模块压制数据中的噪声(图12c,12d).波场延拓用简单的水平层状速度模型,该二维模型通过测井资料纵波速度平滑得到,速度范围在3814~6287m/s之间(图12b),空间网格为dx=dy=dz=7.5m,延拓深度为2500m.
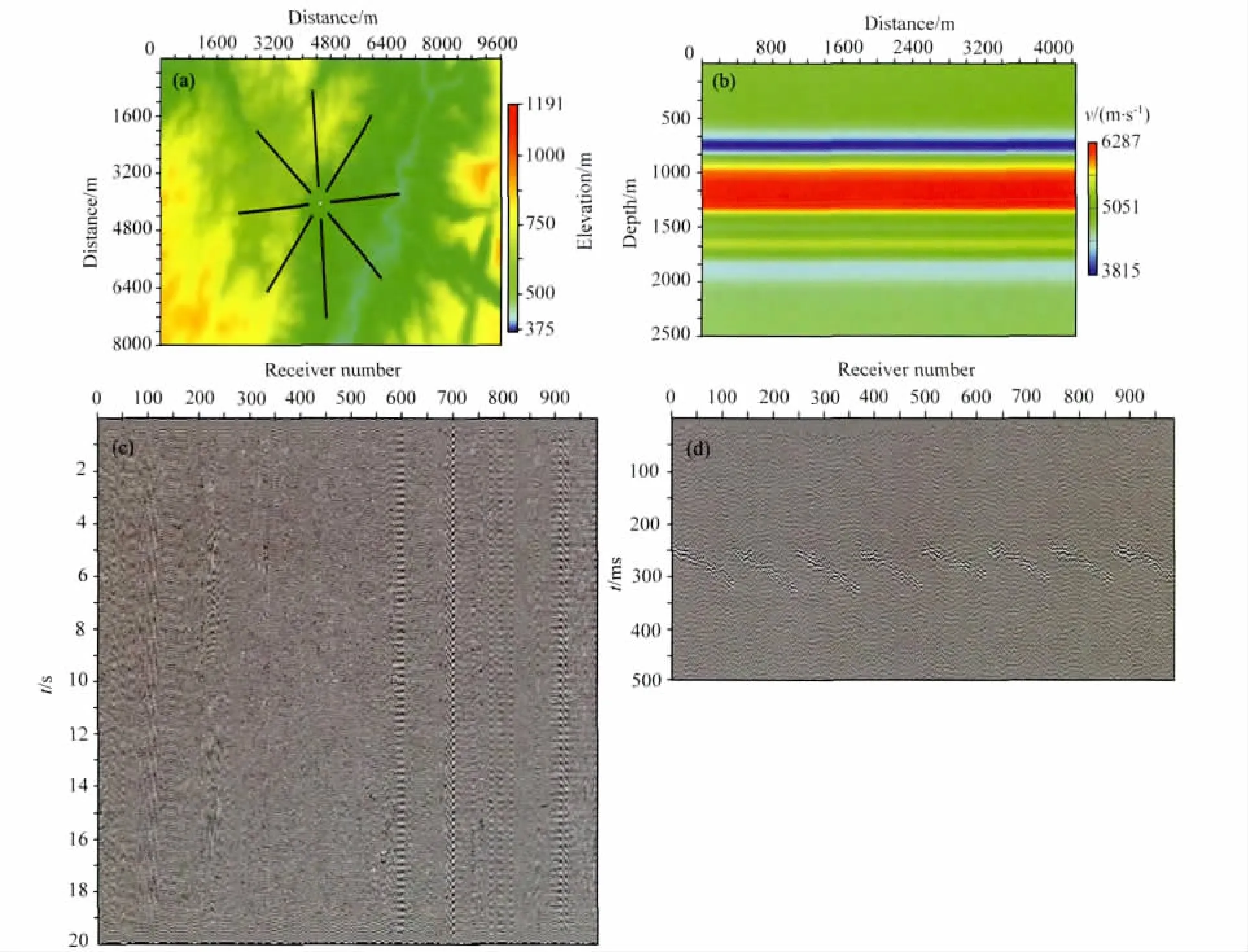
图12 实际射孔采集系统及采集数据(a)采集系统;(b)光滑后的速度模型;(c)去噪前的数据;(d)目标段去噪及静校正后的数据.Fig.12 The recording geometry and data(a)The recording geometry;(b)Smoothed velocity;(c)Unprocessed data;(d)Denoised data with static correction in target segment.

图13 二维实际射孔数据定位结果(a)检波点高程;(b)处理后的数据;(c)常规逆时定位结果;(d)干涉逆时定位结果;(e,f)放大(c,d)中红框部分,白线交点为实际射孔位置.Fig.13 Location results of real field perforation shot data in 2Dcase(a)The elevation of geophones;(b)Processed data;(c)The location result of conventional reverse modeling;(d)The location result of interferometric reverse modeling;(e,f)Zoomed image of red pane in image(c,d),the node of two white lines shows the true perforation position.
首先,选用其中西南—东北向二维测线微地震数据进行试验.分别用传统的逆时定位方法和干涉逆时定位方法分别对数据进行定位,定位结果分别如图13c、13d所示,定位射孔位置分别为水平2173m,深度2125m和水平2150m,深度2050m.虽然传统逆时聚焦算法也给出了震源位置的大致估计,但震源附近有许多能量极值点.而干涉逆时聚焦定位算法给出了便于自动拾取震源坐标的聚焦“成像”数据体,而且也提高了震源水平位置的估计精度(图13e,13f).
然后,利用整个三维微地震数据体进行逆时聚焦定位试验,试验速度模型由二维模型横向扩展得到.同样分别采用传统的逆时定位方法和干涉逆时定位方法对射孔进行定位.我们截取工区中的inline方向的二维图展示三维定位结果(图14a,14b),其定位的射孔位置为(2180m,2054m),震源深度为2150m.从定位结果中可以看到三维的定位结果横向定位精度是高于纵向定位精度的,这点也是采用地面数据进行偏移类定位方法共同的特点.同样在三维情况下干涉逆时聚焦定位算法也给出了便于自动拾取震源坐标的聚焦“成像”数据体(图14c,14d).

图14 三维实际射孔数据定位结果(a)常规逆时定位结果;(b)干涉逆时定位结果;(c,d)放大(a,b)中红框部分,白线交点为实际射孔位置Fig.14 Location results of real field perforation shot data in 3Dcase(a)The location result of conventional reverse modeling;(b)The location result of interferometric reverse modeling;(c,d)Zoomed image of red pane in image(a,b),the node of two white lines shows the true perforation position.
三维定位结果不及二维定位准确,这应该是由于我们采用二维定位时,已经保证射孔位置位于测线下方,故已经保证了其一个维度的精确性.同时波场延拓采用井中速度光滑后的水平层状模型,速度估计过于粗糙也引入了不小的误差.故实际三维定位中通常要依据射孔数据的定位结果和实际射孔位置对整个定位模块进行静态的校正,以提高其定位精度.
5 结论与讨论
本文从微地震逆时定位原理出发,将基于类WDF的干涉定位算法扩展到了多分量三维地面、井中及井地联合观测条件下.干涉方法能够对聚焦波场做一次相干滤波处理,有效地解决了由于速度误差、噪声、稀疏观测等原因引起的定位假象和残余能量问题.基于波场逆时聚焦的定位算法不需要拾取震相走时,具有很强的抗噪能力.理论模型数值试验表明,本文干涉逆时定位方法无论在二维还是三维情况下,都能够有效地压制传统逆时定位算法中存在的定位假象,在精度上满足多源单分量、多分量地面或井中微地震数据处理的需要.由于波场延拓采用双程波动方程,因此单井观测情况下的微地震定位存在“虚震源”假象,多井联合观测能够有效应对这种假象的困扰.射孔资料震源位置已知,有助于认识波动方程逆时聚焦方法在微地震定位方面的能力与特点,同时能帮助我们分析观测系统对定位的影响,其定位误差也通常作为标准来校正系统误差.
不过,由于波场延拓尤其是基于弹性波方程的矢量波场延拓计算成本太高,在效率上很难达到对微地震源实时定位的要求,只适用于一些非实时的高精度定位任务.同时打井成本相对很高,且井中数据在高信噪比条件下可以采用拾取类方法定位,仅用井中数据做逆时定位时还会引入数值假象,不符合效益原则.希望工程人员在实践中能够依据实际数据和观测条件选取适当的定位策略.同时基于以上认识,笔者正在研究射线理论基础上的绕射叠加波场聚焦定位方法,目标是将波场聚焦定位方法的抗噪优势与射线类(如Kirchhoff或高斯束)算法的效率优势结合起来,提高微地震波场聚焦定位算法的实用性,同时针对压裂微地震资料进行相关的研究与试验.此外,微地震定位中速度模型的优化与各向异性因素,以及基于矢量微地震波场的震源机制分析等都是值得深入研究的课题.
(References)
[1]Maxwell S C, Urbancic T I. Real-time 4Dreservoir characterization using passive seismic data.Abstracts of SPE Mtg,2002,77361-MS.
[2]Eisner L,Williams-Stroud S Y,Hill A,et al.Microseismicityconstrained fracture models for reservoir simulation.The Leading Edge,2010,29(3):326-333.
[3]刘建中,王春耘,刘继民等.用微地震法监测油田生产动态.石油勘探与开发,2004,31(2):71-73.Liu J Z,Wang C Y,Liu J M,et al.Micro-seismic monitor on the operation of oil fields.Petroleum Exploration and Development(in Chinese),2004,31(2):71-73.
[4]Walker R N Jr.Cotton valley hydraulic fracture imaging project.Abstracts of SPE Mtg,1997,38577-MS.
[5]Phillips W,Rutledge J T, House L,et al.Induced microearthquake patterns in hydrocarbon and geothermal reservoirs:six case studies.Pure and Applied Geophysics,2002,159(1-3):345-369.
[6]Baig A,Urbancic T.Microseismic moment tensors:A path to understanding FRAC growth.The Leading Edge,2010,29(3):320-324.
[7]Baig A, Urbancic T. Identifying reservoir injection parameters using SMT analysis of microseismicity.80th SEG Expand Abstract,2010:2115-2119.
[8]Trifu C I,Angus D,Shumila V.A fast evaluation of the seismic moment tensor for induced seismicity.Bulletin of the Seismological Society of America,2000,90(6):1521-1527.
[9]Nolen-Hoeksema R C,Ruff L J.Moment tensor inversion of microseisms from the B-sand propped hydrofracture,M-site,Colorado.Tectonophysics,2001,336(1-4):163-181.
[10]Maxwell S C,Rutledge J,Jones R,et al.Petroleum reservoir characterization using downhole microseismic monitoring.Geophysics,2010,75(5):129-137.
[11]张山,刘清林,赵群等.微地震监测技术在油田开发中的应用.石油物探,2002,41(2):226-231.Zhang S,Liu Q L,Zhao Q,et al. Application of microseismic monitoring technology in development of oil field.Geophysical Prospecting for Petroleum (in Chinese),2002,41(2):226-231.
[12]宋维琪,陈泽东,毛中华.水力压裂裂缝微地震监测技术.东营:中国石油大学出版社,2008.Song W Q,Chen Z D,Mao Z H.Hydro-Fracture Cracks Microseismic Monitor Technology (in Chinese).Dongying:China University of Petroleum Press,2008.
[13]Bose S,Valero H P,Liu Q.An automatic procedure to detect microseismic events embedded in high noise.79th SEG Expand Abstract,2009:1537-1541.
[14]Song F X,Kuleli S H,Toksöz N M,et al.An improved method for hydrofracture-induced microseismic event detection and phase picking.Geophysics,2010,75(6):A47-A52.
[15]Rodriguez I V,Bonar D,Sacchi M. Microseismic data denoising using a 3Cgroup sparsity constrained timefrequency transform.Geophysics,2012,77(2):21-29.
[16]Eisner L,Abbott D,Barker W B,et al.Noise suppression for detection and location of microseismic events using a matched filter.78th SEG Expand Abstract,2008:1431-1435.
[17]Gajewski D,Tessmer E.Reverse modelling for seismic event characterization.Geophysical Journal International,2005,163(1):276-284.
[18]McMechan G A.Determination of source parameters by wavefield extrapolation.Geophysical Journal International,1982,71(3):613-628.
[19]Zhebel O,Gajewski D,Vanelle C.Localization of seismic events in 3Dmedia by diffraction stacking.73th EAGE Conference &Exhibition,2011.
[20]Gajewski D,Anikiev D,Kashtan B,et al.Localization of seismic events by diffraction stacking.77th SEG Expanded Abstracts,2010:1287-1291.
[21]Chambers K,Kendall J M,Brandsberg-Dahl S,et al.Testing the ability of surface arrays to monitor microseismic activity.Geophysical Prospecting,2010,58(5):821-830.
[22]Rentsch S,Buske S,Lüth S,et al.Fast location of seismicity:A migration-type approach with application to hydraulic-fracturing data.Geophysics,2007,72(1):S33-S40.
[23]Artman B,Podladtchikov I,Witten B.Source location using time-reverse imaging.Geophysical Prospecting,2010,58(5):861-873.
[24]Witten B,Artman B.Signal-to-noise estimates of timereverse images.Geophysics,2011,76(2):MA1-MA10.
[25]Sava P.Interferometric seismic imaging of sparsely sampled data.70th EAGE Conference &Exhibition,2008.
[26]Sava P.Micro-earthquake monitoring with sparsely sampled data.Journal of Petroleum Exploration and Production Technology,2011,1(1):43-49.
[27]Sava P,Poliannikov O.Interferometric imaging condition for wave-equation migration.Geophysics,2008,73(2):S47-S61.
猜你喜欢
基层中医药(2021年12期)2021-06-05 06:56:26
智族GQ(2019年9期)2019-10-28 08:16:21
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
石油地球物理勘探(2018年4期)2018-07-16 11:48:28
知识经济·中国直销(2017年11期)2017-11-28 05:34:18
纺织科学研究(2017年6期)2017-07-03 12:14:15
地震学报(2016年1期)2016-11-28 05:38:36
地球物理学报(2016年11期)2016-11-23 05:59:21
华北地质(2015年3期)2015-12-04 06:13:25
物探化探计算技术(2015年2期)2015-02-28 17:42:56