基于下一代四星转轮式编队系统精确和快速反演FSCF地球重力场
2013-08-09 09:30:24许厚泽刘成恕员美娟
地球物理学报 2013年9期
郑 伟,许厚泽,钟 敏,刘成恕,员美娟
1 中国科学院测量与地球物理研究所大地测量与地球动力学国家重点实验室,武汉 430077
2 武汉科技大学理学院,武汉 430081
1 引 言
虽然 GRACE(Gravity Recovery and Climate Experiment)卫星重力测量计划较传统重力测量技术(车载、船载和机载)可高效、高精度和高空间分辨率探测地球静态(中长波)和时变(长波)重力场[1-11],但 GRACE重力卫星系统的固有缺点(无法降低卫星轨道高度,无法提高载荷测量精度,无法获取垂向重力梯度,无法减弱高频信号混淆)无法通过自身调节而消除,只有实施下一代新型卫星重力测量计划才能得以有效解决[12-18].为了有效弥补GRACE的不足之处,进而高精度和高空间分辨率地建立下一代地球静态(中短波)和时变(中长波)重力场模型,美国喷气推进实验室(JPL)提出了下一代四星转轮式编队卫星重力测量计划(图1和表1)[19].

图1 下一代四星转轮式编队系统测量原理图[19]Fig.1 Schematic diagram of the next-generation four-satellite cartwheel formation(FSCF)[19]

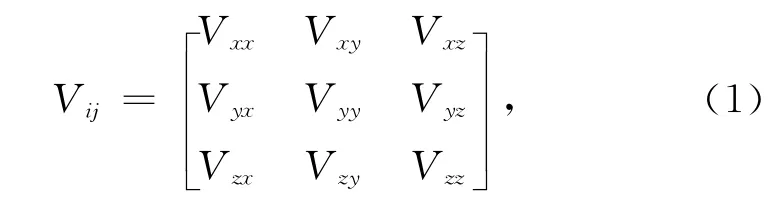
表1 当前GRACE-A/B和下一代FSCF-1/2/3/4卫星重力测量计划对比[19]Table 1 A comparison of current GRACE-A/B and next-generation FSCF-1/2/3/4satellite gravity missions[19]
Massonnet[20]于1998年首次将卫星转轮式编队模式应用于被动雷达干涉测量;Sneeuw和Schaub[21]于2004年提出了基于卫星转轮式编队系统精密探测地球重力场的新思想.如图1和表1所示,基于四星转轮式编队模式高精度测量地球重力场的主要思想如下:(1)每颗单星沿各自的椭圆轨道绕地球飞行;(2)四星转轮式编队系统的质心以圆轨道模式环地球运动;(3)每颗单星绕编队系统质心以椭圆轨道形式旋转(半长轴∶半短轴=2∶1).地球引力位V(r,θ,λ)分别对 (x,y,z)的二阶导数表示如下:
其中,地球引力位二阶导数是对称张量,同时在真空情况下满足Laplace方程表现为无迹性Vxx+Vyy+Vzz=0,因此在9个重力梯度分量中有5个是独立的.GRACE共轨双星采用前后跟踪的串行式编队模式,相当于基线长为星间距离ρ12的水平重力梯度仪,因此仅能测量视线方向的水平重力梯度分量Vxx;转轮式编队模式可同时测量水平和垂直重力梯度分量 (Vxx,Vxz,Vzz).由于垂向重力梯度的功率谱约为水平重力梯度功率谱的2倍,P{Vzz}=2P{Vxx},因此,由于不仅增加了垂向重力梯度信号,而且较大程度降低了轨道高度和提高了关键载荷测量精度的综合影响,基于转轮式编队模式反演地球重力场的精度较GRACE串行式编队模式的测量精度至少提高一个数量级.
卫星轨道根数的优化设计是成功实施下一代四星转轮式编队系统卫星重力测量计划的重要保证.文献[22]提出将下一代四星转轮式编队系统的初始近地点辐角设置于极点处和初始平近点角设计于赤道处较优.不同于上述研究结果,我们重新开展了下一代四星转轮式编队系统轨道根数的稳定性设计研究,结果表明:将初始近地点辐角ω设置于赤道处和初始平近点角M 设计于极点处有利于保持下一代四星转轮式编队系统的稳定性.
2 卫星轨道根数的优化设计
如图1所示,下一代四星转轮式编队系统可通过设定6个开普勒轨道根数(轨道半长轴a、轨道偏心率e、轨道倾角i、升交点赤经Ω、近地点幅角ω和初始平近点角M)实现,具体规则如下:(1)轨道半长轴a、轨道偏心率e、轨道倾角i和升交点赤经Ω保持不变;(2)每对卫星(FSCF-1/2和 FSCF-3/4)的近地点幅角ω和平近点角M 分别相差180°(ω1=ω2+180°和M1=M2+180°);(3)设定下一代四星转轮式编队系统椭圆轨道的半长轴和半短轴之比为ρmax∶ρmin=2∶1.由于地球重力场的非对称性和非均匀性以及地球扁率项J2的综合影响和作用,下一代四星转轮式编队系统的轨道稳定性将发生急剧和快速的漂移.虽然可以通过每颗卫星自身的轨道和姿态推进器维持整体系统的稳定性,但大量喷气燃料消耗将导致下一代四星转轮式编队系统寿命的急速缩短.因此,下一代四星转轮式编队系统轨道根数的优化设计是建立下一代高精度、高空间分辨率和高阶次地球重力场模型的关键因素.
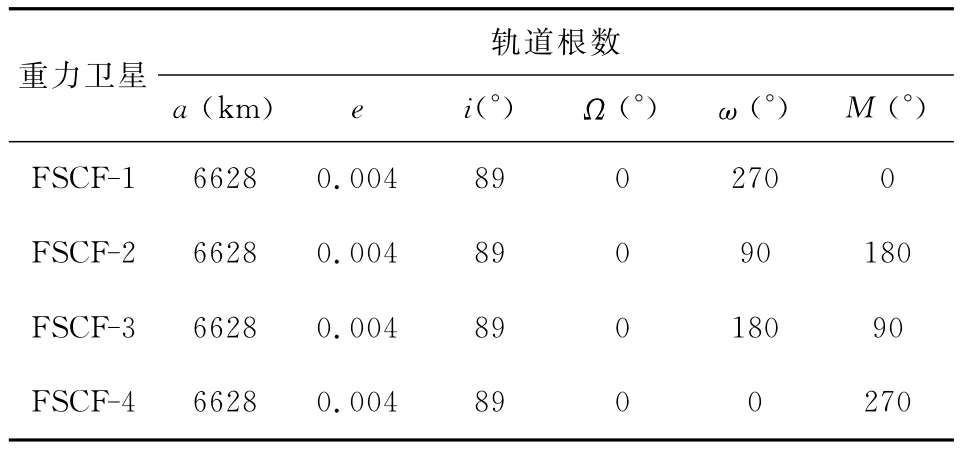
表2 下一代四星转轮式编队系统轨道根数的优化设计Table 2 Optimal design of orbital elements in the next-generation four-satellite cartwheel formation
我们利用Runge-Kutta线性单步法结合12阶Adams-Cowell线性多步法数值积分公式仿真模拟了FSCF-1/2/3/4卫星轨道,其中轨道高度250km、观测时间30天、采样间隔10s、参考重力模型EGM2008,Kepler轨道根数如表2所示.图2a表示下一代四星转轮式编队系统中FSCF-1/2的星间距离,其中近地点幅角ω设置于极点处和平近点角M 设置于赤道处(图2b).图3a表示下一代四星转轮式编队系统中FSCF-3/4的星间距离,其中近地点幅角ω设置于赤道处和平近点角M 设置于极点处(图3b).通过图2a和图3a对比可知,将初始近地点辐角设置于赤道处以及将初始平近点角设置于极点处可有效抑制下一代四星转轮式编队系统的漂移,进而确保编队系统的地球重力场测量稳定性和精确性.
3 地球重力场反演
基于Gauss-Markov模型,卫星观测值的色噪声表示如下[23]:

其中,αj(j=1,2,…,τ)表示正态分布的随机白噪声(β=0),j表示观测点的个数;σj(j=1,2,…,τ)表示具有相关性的色噪声(0<β<1).

图2 (a)下一代四星转轮式编队系统中FSCF-1/2的星间距离;(b)FSCF-1/2卫星的近地点幅角和平近点角Fig.2 (a)Intersatellite range of FSCF-1/2in the next-generation four-satellite cartwheel formation;(b)Argument of perigee and mean anomaly of the FSCF-1/2satellites
图4表示基于Gauss-Markov色噪声模型,利用相关系数(激光干涉测量系统的星间速度0.85、GPS接收机的轨道位置和轨道速度0.95、星载加速度计的非保守力0.90)[24]和采样间隔10s模拟的星间速度以及轨道位置、轨道速度和非保守力x轴方向的色噪声(GPS接收机的轨道位置和轨道速度精度指标可通过高精度激光干涉测量系统辅助获得),统计结果如表3所示.
如图5所示,虚线表示德国波兹坦地学研究中心(GFZ)公布的120阶地球重力场模型EIGENGRACE02S的实测精度,在120阶处累计大地水准面精度为1.894×10-1m;星号线和实线分别表示基于下一代双星串行式(GRACE-II)和四星转轮式(FSCF-1/2/3/4)编队系统,利用星间速度插值法[25],通过相关系数(激光干涉测量系统的星间速度0.85、GPS接收机的轨道位置和轨道速度0.95、星载加速度计的非保守力0.90)、观测时间30天和采样间隔10s,反演 GRACE-II和 FSCF-1/2/3/4地球重力场的模拟精度,在120阶处累计大地水准面精度分别为4.785×10-4m和1.162×10-4m,统计结果如表4所示.研究结果表明:第一,相对于下一代GRACE-II双星串行式编队系统,由于下一代FSCF-1/2/3/4四星转轮式编队系统增加了垂向重力梯度信号的测量,因此有效提高了中长波地球重力场的感测精度.在120阶处,基于下一代FSCF-1/2/3/4四星转轮式编队系统反演地球重力场的精度较下一代GRACE-II双星串行式编队系统的反演精度提高约4倍.第二,基于下一代FSCF-1/2/3/4四星转轮式编队系统反演地球重力场的精度较当前GRACE卫星的反演精度至少提高一个数量级.

表3 卫星观测值的色噪声统计Table 3 Statistics of colored noises from satellite observations

图3 (a)下一代四星转轮式编队系统中FSCF-3/4的星间距离;(b)FSCF-3/4卫星的近地点幅角和平近点角Fig.3 (a)Intersatellite range of FSCF-3/4in the next-generation four-satellite cartwheel formation;(b)Argument of perigee and mean anomaly of the FSCF-3/4satellites

表4 累计大地水准面精度统计Table 4 Statistical results of cumulative geoid height errors
4 下一代四星转轮式编队系统的优点
(1)可较大程度降低卫星轨道高度.由于GRACE双星串行式编队系统采用星载加速度计在轨实时测量非保守力,然后在数据后处理中再扣除非保守力效应.因此,由于非保守力的负面干扰,GRACE卫星的轨道高度(500km)无法有效降低.国内外研究表明:重力卫星轨道高度每降低100km,作用于卫星体的非保守力(以大气阻力为主)约增加10倍[26].为了给重力卫星关键载荷提供安静和稳定的工作环境进而有效提高其测量精度(适当缩短测量动态范围),以及通过屏蔽作用于卫星体的非保守力(大气阻力、太阳光压、地球辐射压、轨道高度和姿态控制力等)进而有效延长卫星的使用寿命,下一代四星转轮式编队系统将携带非保守力补偿系统(Drag-Free Control System,DFCS).因此,下一代四星转轮式编队系统可实质性降低卫星轨道高度(250km),进而有效抑制地球重力场信号随卫星轨道高度增加的指数衰减效应.
图4 星间速度、轨道位置、轨道速度和非保守力的色噪声模拟Fig.4 Colored noises of intersatellite range-rate,orbital position,orbital velocity and non-conservative force
(2)可实质性提高关键载荷测量精度.GRACE双星串行式编队系统采用K波段测距系统测量星间距离(10μm)和星间速度(1μm/s),同时基于SuperSTAR加速度计测量作用于卫星体的非保守力(10-10m·s-2).为了进一步降低关键载荷误差对地球重力场精度的负面影响,下一代四星转轮式编队系统将搭载更高精度的激光干涉测距系统精确测量星间距离(10nm)和星间速度(1nm/s),同时借助非保守力补偿系统高精度平衡作用于卫星体的非保守力(10-13m·s-2).由于下一代四星转轮式编队系统的关键载荷测量精度得以大幅度提升,因此基于下一代四星转轮式编队系统建立的地球重力场模型精度较当前基于GRACE双星串行式编队系统建立的模型精度至少可提高一个数量级.
(3)可同时测量三维重力梯度观测值.由于GRACE双星串行式编队系统相当于基线长为星间距离(220km)的水平重力梯度仪,因此GRACE无法获得垂向重力梯度信号,进而较大程度地损失了地球重力场精度.下一代四星转轮式编队系统能同时精确获得三维重力梯度(水平和垂向)观测信号,不仅可大幅度提高地球重力场的精度和空间分辨率,而且可有效去除由于垂向重力梯度信号的缺失而导致的地球时变重力场的经向条带误差(各向同性更优).

图5 基于下一代四星转轮式编队系统反演累计大地水准面精度Fig.5 Cumulative geoid height errors based on the next-generation four-satellite cartwheel formation
(4)可有效抑制高频信号的混淆效应.大气和海洋潮汐变化等高频误差的混淆效应是降低GRACE地球重力场反演精度的最关键因素[27-28].由于GRACE大气和海洋潮汐变化等高频误差接近于大气和海洋潮汐计算模型误差,因此大气和海洋潮汐变化等高频误差较难从GRACE地球重力场模型中精确扣除.下一代四星转轮式编队系统,不仅可类似于GRACE双星串行式编队系统测量视线方向的重力梯度分量,同时将增加测量垂直于视线方向的重力梯度信号,旨在削减高频混淆效应对地球重力场反演精度的负面干扰.
(5)可探测地球中长波时变重力场信号.GRACE双星串行式编队系统仅能探测地球长波时变重力场信号(空间分辨率约400km),无法高精度确定地球中长波时变重力场信号(空间分辨率优于200km).下一代四星转轮式编队系统采用新型和精确激光干涉星间测距仪和非保守力补偿系统将大幅度提高地球中长波时变重力场信号的感测精度,旨在为地震学、海洋学、冰川学、水文学等科学和国防交叉研究领域提供更高精度和更高空间分辨率的地球时变重力场信息.
5 结 论
(1)不同于前人的研究结果,为了有效抑制下一代四星转轮式编队系统的漂移,我们建议将初始近地点辐角ω设置于赤道处和初始平近点角M 设计于极点处较优.
(2)我们利用星间速度插值法反演了120阶FSCF地球重力场,其精度较目前GRACE地球重力场精度至少提高一个数量级,进而验证了本文设计下一代四星转轮式编队系统轨道根数的正确性.
(3)基于可较大程度降低卫星轨道高度、可实质性提高关键载荷测量精度、可同时测量三维重力梯度观测值、可有效抑制高频信号的混淆效应、以及可探测地球中长波时变重力场信号的优点,四星转轮式编队系统有望成为建立下一代高精度和高阶次全球重力场模型的优选方案之一.
(References)
[1]许厚泽.卫星重力研究:21世纪大地测量研究的新热点.测绘科学,2001,26(3):1-3.Xu H Z.Satellite gravity missions-new hotpoint in geodesy.Science of Surveying and Mapping (in Chinese),2001,26(3):1-3.
[2]宁津生.卫星重力探测技术与地球重力场研究.大地测量与地球动力学,2002,22(1):1-5.Ning J S.The satellite gravity surveying technology and research of Earth′s gravity field.Journal of Geodesy and Geodynamics(in Chinese),2002,22(1):1-5.
[3]张捍卫,许厚泽,刘学谦.固体潮Love数的基本理论和数值结果.地球物理学进展,2004,19(2):372-378.Zhang H W,Xu H Z,Liu X Q.Basic theory and numerical result of the Love number of solid Earth tide.Progress in Geophysics(in Chinese),2004,19(2):372-378.
[4]沈云中,许厚泽,吴斌.星间加速度解算模式的模拟与分析.地球物理学报,2005,48(4):807-811.Shen Y Z,Xu H Z,Wu B.Simulation of recovery of the geopotential model based on intersatellite acceleration data in the low-low satellite to satellite tracking gravity mission.Chinese J.Geophys.(in Chinese),2005,48(4):807-811.
[5]程芦颖,许厚泽.地球重力场恢复中的位旋转效应.地球物理学报,2006,49(1):93-98.Cheng L Y,Xu H Z.The rotation of the gravity potential on the Earth′s gravity field recovery.Chinese J.Geophys.(in Chinese),2006,49(1):93-98.
[6]周旭华,许厚泽,吴斌等.用GRACE卫星跟踪数据反演地球重力场.地球物理学报,2006,49(3):718-723.Zhou X H,Xu H Z,Wu B,et al.Earth′s gravity field derived from GRACE satellite tracking data.Chinese J.Geophys.(in Chinese),2006,49(3):718-723.
[7]郑伟,邵成刚,罗俊等.基于卫-卫跟踪观测技术利用能量守恒法恢复地球重力场的数值模拟研究.地球物理学报,2006,49(3):712-717.Zheng W,Shao C G,Luo J,et al.Numerical simulation of Earth′s gravitational field recovery from SST based on the energy conservation principle.Chinese J.Geophys.(in Chinese),2006,49(3):712-717.
[8]Xu P L. Position and velocity perturbations for the determination of geopotential from space geodetic measurements.Celestial Mechanics and Dynamical Astronomy,2008,100(3):231-249.
[9]郑伟,许厚泽,钟敏等.基于半解析法有效和快速估计GRACE全球重力场的精度.地球物理学报,2008,51(6):1704-1710.Zheng W,Xu H Z,Zhong M,et al.Efficient and rapid estimation of the accuracy of GRACE global gravitational field using the semi-analytical method.Chinese J.Geophys.(in Chinese),2008,51(6):1704-1710.
[10]郑伟,许厚泽,钟敏等.GRACE卫星实测数据有效处理和地球重力场快速解算.地球物理学报,2009,52(8):1966-1975.Zheng W,Xu H Z,Zhong M,et al.Effective processing of measured data from GRACE key payloads and accurate determination of Earth′s gravitational field.Chinese J.Geophys.(in Chinese),2009,52(8):1966-1975.
[11]Zheng W,Xu H Z,Zhong M,et al.Efficient accuracy improvement of GRACE global gravitational field recovery using a new inter-satellite range interpolation method.Journal of Geodynamics,2012,53:1-7.
[12]Sneeuw N.Science requirements on future missions and simulated mission scenarios.Earth,Moon,and Planets,2005,94(1):113-142.
[13]Bender P L,Wiese D N,Nerem R S.A possible dual-GRACE mission with 90degree and 63degree inclination orbits.∥ Proceedings of the Third International Symposium on Formation Flying,Missions and Technologies.ESA/ESTEC,Noordwijk,2008:1-6.
[14]Zheng W,Shao C G,Luo J,et al.Improving the accuracy of GRACE Earth′s gravitational field using the combination of different inclinations.Progress in Natural Science,2008,18(5):555-561.
[15]Zheng W,Xu H Z,Zhong M,et al.Physical explanation of influence of twin and three satellites formation mode on the accuracy of Earth′s gravitational field.Chinese Physics Letters,2009,26(2):029101-1-029101-4.
[16]郑伟,许厚泽,钟敏等.利用解析法有效快速估计将来GRACE Follow-On地球重力场的精度.地球物理学报,2010,53(4):796-806.Zheng W,Xu H Z,Zhong M,et al.Efficient and rapid estimation of the accuracy of future GRACE Follow-On Earth′s gravitational field using the analytic method.Chinese J.Geophys.(in Chinese),2010,53(4):796-806.
[17]Wiese D N,Nerem R S,Lemoine F G.Design considerations for a dedicated gravity recovery satellite mission consisting of two pairs of satellites.Journal of Geodesy,2012,86:81-98.
[18]Loomis B D,Nerem R S,Luthcke S B.Simulation study of a follow-on gravity mission to GRACE.Journal of Geodesy,2012,86(5):319-335.
[19]Wiese D N,Folkner W M,Nerem R S.Alternative mission architectures for a gravity recovery satellite Mission.Journal of Geodesy,2009,83(6):569-581.
[20]Massonnet D.Roue interfrometrique.French patent no 339920D17306RS,1998.
[21]Sneeuw N,Schaub H.Satellite clusters for future gravity field missions.IAG International Symposium,Gravity,Geoid and Space Missions,2004,Porto,Portugal.2005:12-17.
[22]Wiese D N.Alternative mission architectures for a gravity recovery satellite mission[Master′s thesis].Boulder:University of Colorado,2007:1-73.
[23]Reubelt T,Austen G,Grafarend E W.Harmonic analysis of the Earth′s gravitational field by means of semi-continuous ephemeris of a low Earth orbiting GPS-tracked satellite,Case study:CHAMP.Journal of Geodesy,2003,77(5-6):257-278.
[24]郑伟,许厚泽,钟敏等.插值公式、相关系数和采样间隔对GRACE Follow-On星间加速度精度的影响.地球物理学报,2012,55(3):822-832.Zheng W,Xu H Z,Zhong M,et al.Impacts of interpolation formula,correlation coefficient and sampling interval on the accuracy of GRACE Follow-On intersatellite range-acceleration.Chinese J.Geophys.(in Chinese),2012,55(3):822-832.
[25]Zheng W,Xu H Z,Zhong M,et al.Precise recovery of the Earth′s gravitational field with GRACE:Intersatellite Range-Rate Interpolation Approach.IEEE Geoscience and Remote Sensing Letters,2012,9(3):422-426.
[26]郑伟,许厚泽,钟敏等.卫-卫跟踪测量模式中轨道高度的优化选取.大地测量与地球动力学,2009,29(2):100-105.Zheng W,Xu H Z,Zhong M,et al.Optimal design of orbital altitude in satellite-to-satellite tracking model.Journal of Geodesy and Geodynamics (in Chinese),2009,29(2):100-105.
[27]Han S C,Jekeli C,Shum C K.Time-variable aliasing effects of ocean tides,atmosphere,and continental water mass on monthly mean GRACE gravity field.Journal of Geophysical Research,2004,109:B04403.
[28]Seo K W,Wilson C R,Chen J,et al.GRACE′s spatial aliasing error.Geophysical Journal International,2008,172:41-48.
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
空间科学学报(2020年3期)2020-07-24 09:23:28
——不忘初心担使命 奋力前行作表率
湖北省社会主义学院学报(2020年1期)2020-05-25 07:39:56
心声歌刊(2019年1期)2019-05-09 03:21:28
中国惯性技术学报(2019年6期)2019-03-04 09:50:08
新课程·小学(2017年4期)2017-06-26 23:52:34
测绘科学与工程(2017年4期)2017-05-25 01:48:16
测绘科学与工程(2017年1期)2017-05-04 03:40:41
航海(2016年5期)2016-10-11 14:42:19
测绘科学与工程(2014年3期)2014-02-27 07:06:00