
圆盘解耦式振动料斗的机械结构设计与实验研究
2013-08-09 07:41:28凌少钦颜凯歌
电子工业专用设备 2013年4期
韩 良,凌少钦,颜凯歌
(东南大学机械工程学院,江苏南京 211189)
工件的定向与传输是实现制造业生产自动化的关键技术之一。据统计,其相关成本约占制造设备总成本的15%[1,2]。振动传输是实际生产中最重要的一种定向与传输方法,广泛应用于电子元件制造业以及医疗、食品、烟草、矿山以及军事等行业。其主要优点是:上料平稳,易于调节维护,易于标准化,系列化,通用化,适用范围广。然而,在振动传输装置的设计与制造过程中存在着一些突出的棘手问题:定向机构的设计和加工难度大,送料率不够理想,能耗较高,稳定性较差,工件堵塞率高等问题。有时对于一些形状复杂的工件,其相应的定向机构几乎难以用通常的视图来表达,在实际制造与加工过程中,只能边调整边修磨,加工周期很长[3]。
为解决这一问题,本课题组于1998年首次提出解耦式振动传输(Decoupled Vibratory Feeding)概念[4],并相继于2001年首次将解耦式振动传输装置与机器视觉、振动传感器以及计算机控制系统集成在一起,提出一种全新的智能化柔性振动传输系统(Sensor-based Flexible Vibratory Feeding System)[5],随后研发了智能化柔性振动传输系统实验平台,该系统不仅可以在无须改变料盘机械结构的前提下就能够对多种工件实现定向与传输,而且可以对具有不同摩擦系数的工件进行最优传输(以最小的能耗实现最高的传输速率)。在传统的振动传输装置中,水平方向的振动与垂直方向上的振动耦合在一起,同步进行,即两方向上的振动信号的相位角固定为零(同相),不可进行任何调整。而且,一旦装置制造完成并投入使用之后,其振动升角相应固定,也难以进行任何有效调整[6-8]。而解耦式振动传输则完全不同,其水平方向上的振动与垂直方向上的振动完全解耦,可独立产生并可分别进行独立控制。这样,上述两方向上的振动信号可有不同的频率、幅值比和相位差。振动升角也不再是固定值,而是随两信号幅值比的改变而取不同的值。
天津大学2005年研究开发的一种柔性振动供料器产品平台[9-11],它是将与底座有一定夹角的板弹簧替换为水平板弹簧和垂直板弹簧两部分,机械结构独立,分别实现垂直振动和水平扭转,通过运动合成实现螺旋槽工作面按一定角度和旋向的复合运动。因此,两路振动的幅值大小由各自的驱动器独立改变,而其相位关系也可随驱动信号的相位及振动系统的频率特性的不同而变化。天津工业大学2008年研发的新型直线解耦式电磁振动供料器[12],其水平电磁线圈和垂直电磁线圈分别由两路控制系统控制,两路电压大小、频率值可调节;垂直电磁线圈和水平电磁线圈通电后,各产生一个垂直脉冲电磁力和水平脉冲电磁力,驱动水平主振弹簧和垂直主振弹簧各自发生变形。衔铁与铁芯之间脉冲电磁力做周期性的变化,垂直作用力使料槽上下振动,而水平作用力使料槽左右振动,合成后使料槽振动方向与水平方向成一定夹角,且夹角可以通过控制上下和左右的振动进行调节,从而控制物料的运动。日本神钢电机株式会社2003年推出了解耦式振动料斗(Dual Motion Parts Feeders)产品[13],以 ATmegal16 单片机为核心,金属接近传感器为反馈单元,采用PWM脉宽调制控制,可控硅作驱动,单独给予料斗水平振动和垂直振动的振幅和相位差,不论什么样的物料都能得到较好的振动特性。
虽然解耦式振动料斗具有优良的特点,能够弥补传统振动传输系统的不足,但是目前国内对解耦式振动料斗的研究还处于试验阶段,没有能够独立设计制造的生产厂商。因此对解耦式振动料斗机械结构设计、工件传输速度和振动参数间关系的研究有着重要的意义。
1 解耦式振动料斗的机械结构设计
解耦式振动料斗区别于传统的电磁振动料斗的一个突出特征就是它的料槽在水平和竖直方向上的振动是解耦的,互不相关的,而且分别由两组电磁铁驱动,这样就使得解耦式振动料斗的机械结构与传统的料斗有着巨大的差别[14]。解耦式振动料斗的机械结构主要包括激振器、弹性系统、圆形料盘和减震器组成。料盘的形状决定于传输工件的形状、定向方法和装载量,在生产中最常用的有带螺旋槽的圆柱形料盘和圆锥形料盘。振动传输工件的具体情况对料盘及定向机构的设计提出了不同的要求,所以在此并不对特定的物料进行设计。减震器一般采用圆柱形弹簧和橡胶弹簧,橡胶作为一种高分子材料,具有良好的弹性,可根据不同规格的料斗采用不同的锥形橡胶垫脚。下面将会针对激振器和弹性系统分别进行设计。
1.1 激振器的设计
电磁铁是利用通电的铁心线圈吸引衔铁或保持某种机械零件、工件于固定位置的一种电器。衔铁的动作可使与其相连接的机械装置发生联动。电磁铁主要由线圈、静铁及动铁三部分组成,如图1所示。
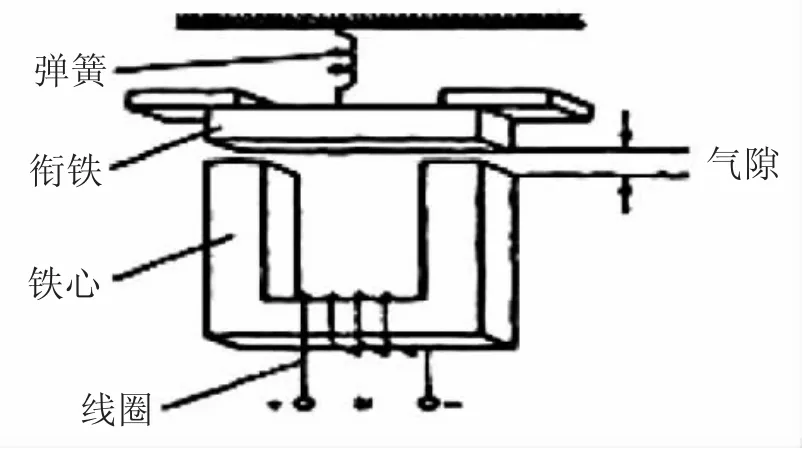
图1 电磁铁的基本组成
在具体的产品开发中,可以根据产品用途、使用条件等因素选择直流或交流电磁铁。而为能正确选择合适的电磁铁,需要初步确定激振力大小。当振动料斗的激振力是周期性谐波力时,通过建立其微分方程进行求解,可推导出激振力的计算公式:

其中,λ 为频率比,λ=ω/ω0;
f0为料斗固有频率,f0=1/ω0;
m1为振动料斗的上部质量,包括料盘、衔铁等;
a1为质量的振幅;
b为衰减系数,。
由式 (1)可以看出所需的激振力与振幅成正比,在本系统中,由此公式可推出水平安装电磁铁的条件。若略去阻尼值,则式(1)可以变为:

由激振力计算公式可知,阻尼系数的选定对激振力F的计算,以及给料器结构尺寸设计均有影响。实际应用中,可以通过传感器测试其振幅,反推激振力的大小。同时使用电磁铁时要注意,气隙对料斗工作影响很大。气隙值太大,则电磁吸力不足,影响送料;反之,若气隙太小或等于零,会使衔铁与铁芯相撞产生噪音,破坏振动节奏,影响正常工作。总之,要使衔铁被吸后,仍保留一个最小气隙,一般取0.1~0.3 mm。
1.2 弹性系统设计
弹性系统为整个解耦料斗机械结构设计的核心[15],主要涉及板弹簧的空间布局、板弹簧设计计算及参振框架的设计,弹性系统设计包括竖直方向和水平方向的设计。竖直方向的板弹簧拟采用切向的布置,如图2(a)所示。水平方向的板弹簧拟采用垂直放置,如图2(b)所示。
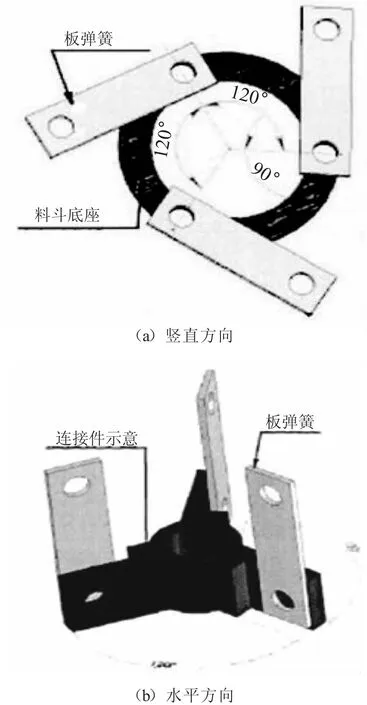
图2 板弹簧的空间位置
振动料斗的固有角频率ω0与支承弹簧的刚度K1有关,即,若选定频率比z时,即可由选择定的激振频率确定系统所需的固有频率ω0[16]。在给定M时,就可由固有频率公式算出支承弹簧的刚度K1。根据特定的支承弹簧刚度,然后结合不同的安装方式,按材料力学即可求出弹簧截面尺寸及其最小工作长度。
支撑弹簧刚度对工作性能有很大影响,故在振动料斗的设计计算中,弹簧刚度应满足振动系统处于亚共振状态。为此弹簧刚度应满足系统固有角频率的要求,即:

如果有i根支承弹簧,则每根弹簧的刚度K1'为 K1'=K1/i,则

其中:i为支承弹簧的数量,一般i=3或4;
f0为系统的固有频率(Hz),一般f0=(1.05~1.1)f(f为电磁铁外激频率);
M为振动系统的质量(kg)。
对于支撑弹簧,可按两端完全固结的弹簧计算,其刚度可由下式求得:

其中:E为弹簧材料的弹性模量(Pa);
Ia为弹簧截面的惯性矩(m4)。
若 i=3,由式(4)、式(5),得:

因为板弹簧截面惯性矩为Ia=bh3/12,使式(5)和式(6)相等,得:

其中:h为弹簧厚度(m),一般为(2~3)×10-3m;
b为弹簧宽度(m),一般为(15~20)×10-3m。
弹簧最小长度lmin应以弹簧的最大应力σmax不超过允许的对称循环弯曲疲劳许用应力[σ-1]为准,即
在补短板的同时,也要把发动群众的工作放在第一位。坚持党的群众路线,要始终坚持“两个一切”,一个是一切为了群众,另一个是一切依靠群众。现在司法所面临的所有困难,应该用这两句话来寻找突破。依靠群众,群众是我们力量的源泉。不管你这个所是一个人,是五个人,还是十个人,都不能离开发动群众,要充分把群众发动起来,共同治理社会,这也是习近平总书记反复强调的“共建、共治、共享”。在司法所建设当中,我们一定要把共治做到位。别说你人不够,就是有再充分的力量,光依靠我们自己的力量,没有发动群众、没有群众的支持,什么工作也做不好。

对于这种两端紧固的支承弹簧,其最大弯曲力矩 Mmax为 Mmax=6EIay/l2,故

其中:Mmax为最大弯曲力矩(N·m);
W 为弹簧抗弯截面模量(m3),W=bh2/6;
y为弹簧挠度(m)。
同理,先将式(8)和式(9),可得

根据上述分析,即可求出支撑板弹簧的刚度、截面尺寸和最小工作长度,这是解耦料斗中设计其它零件的先决条件。通过以上的分析,可以初步设计出解耦式振动料斗的机械结构方案,其初步的机械结构设计方案如图3所示。
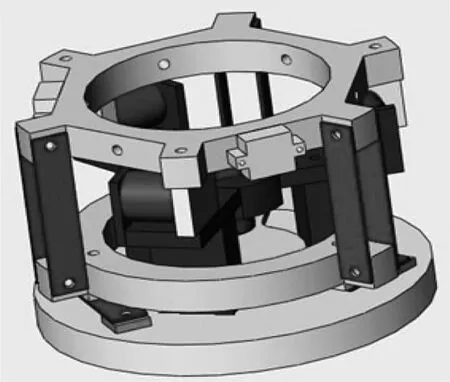
图3 解耦式振动料斗机械结构设计
2 实验研究
为了更直接可靠地研究该系统参数间的关系,需要对解耦式振动料斗样机进行实验研究,从而论证结构设计的正确性。通过实验研究振动传输工件与水平和垂直两方向振动幅值、相位差之间的关系,并由实验验证振动料斗的最佳工作参数。
2.1 振幅对传输速度的影响
水平、竖直两方向上的振动频率相同、相位差为一定,在这些条件下,研究竖直方向振动与水平方向振动振幅按比值为tanβ取一系列值时,送料率的情况,即不同振幅对工件传送速度的影响。
激振频率选择99 Hz;选择一个相位差,在这里选择的λ约106°。在取得一个竖直方向上的加速幅值以后,调整水平振幅,测出此时工件从一端到另一端所用的时间,依此方式,取得一系列的数值,然后计算出工件平均速度以及此时相对应的竖直和水平方向上的振幅,以竖直方向上的振幅与重力加速度的比值作为横坐标,以工件速度的绝对值为纵坐标,做出折线图如图4所示。
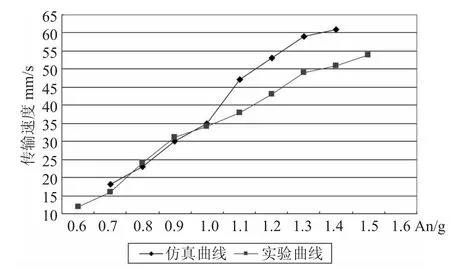
图4 加速度幅值与工件传输速度关系曲线
2.2 相位差对传输速度的影响
水平、竖直两方向上的振动频率相同、振幅一定、振动升角约为25°、竖直方向上的振动约为重力加速度的1.1倍,在这些条件下,研究竖直方向振动与水平方向的振动不同相位时,送料率的情况,即不同的相位差对工件传送速度的影响。
首先做的是相位差对工件传送速度的影响的实验,将系统调整好以后,在360°的范围内以间隔为3.6°的步幅提供驱动信号电压,尽可能多的取得符合条件的相对稳定状态时的参数,同一状态时,在示波器上可以直接获得的相位差数据是以毫秒为单位的时间t,则相位差λ可以由下式获得:

其中:t为竖直水平方向上的振动滞后于水平方向上的振动的时间,单位为ms;
λ为相位差,单位为度(°)。
由秒表可以读出工件由料盘一端运动到另一端的时间T,用卷尺量出工件运动的距离S,则工件运动的平均速度V可以由下式算出:

其中:V为工件平均速度,单位为mm/s,工件逆时针移动V记为正,反之,记为负;
S为工件运动距离,单位为mm;
T为工件运动的时间,单位为s。
在分别得到工件运动的速度和其相对应的相位差以后,作出折线如图5所示。
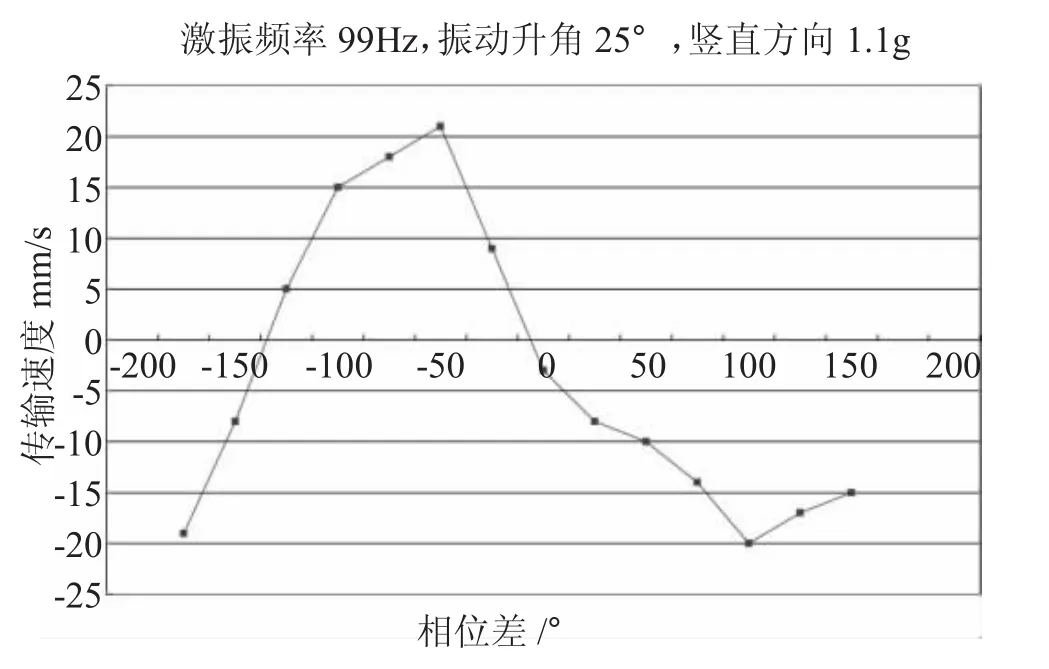
图5 相位差与工件传送速度关系曲线
2.3 实验数据分析与总结
由相位差实验可以得到,在频率、振幅、振动升角以及摩擦系数、料槽升角都不变的情况下,仅仅改变相位差,此时,在相位差分别约为-54°和103°时,工件传送速度最快,也标志着上料效率最高,明显要比相位差为零时传送效率高许多,另外工件可以实现正方双向运动。
由振幅实验可以看出,在相位一定时,同时振动升角、驱动频率等其他条件都不变时,工件传送速度与料槽在水平和竖直方向上的振动加速度幅值呈正比。这一点,就是传统的料斗调节送料速度的唯一方式。这一点说明,解耦式振动料斗兼有传统料斗的优点,解耦式振动料斗与传统的振动料斗在振幅对送料率的影响这一参数上是一致的。
3 结 论
本文对圆盘解耦式振动料斗的振动系统进行了分析,给出了机械结构的设计方案,推导了激振器的激振力、支撑板弹簧的刚度、截面尺寸和最小工作长度的计算方法,为解耦式振动料斗具体产品的开发,特别是圆盘型振动料斗,提供了通用性、系列化的方案选择,而各具体部分的设计和计算,可为产品化设计提供依据。
[1] Boothroyd G.,Polio C.and Murch L.E.Automatic Assembly[M].Marcel Dekker,New York,1982.
[2] Du W.Y.,Stephen P.E.and Dickerson L.Modeling and Control of a Novel Vibratory Feeder[C].Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,Sept.19-23,1999,Atlanta,USA,pp.496-501.
[3] Cokayne A.The Way of the World A Review of Current Practice in Automatic Parts Recognition,Feeding and Orientation,AssemblyAutomation[M],v11,1991:29-32.
[4] L.Han,W.L.Xu,S.K.Tso,Decoupled Vibratory Bowl Feeder 5th International Conference on Mechatronics and Machine Vision in Practice[C],Nanjing,China,Sept.10-12,1998:481-486.
[5] L.Han,S.K.Tso,Mechatronic Design and Control of a Flexible VibratoryFeedingSystem[J],Proceedings-IEEE M2VIP,2001:206-213.
[6] 康东.关于用在振动料斗的压电陶瓷块的研究[J].四川工业学院学报,2001(2):起止页码
[7] 周梅芳.电磁振动料斗调试过程中易出现的问题及解决措施[J].扬州职业大学学报,2001(1):起止页码.
[8] 韩良,徐卫良.振动料斗的研究状况与前景展望[J].电子工业专用设备,1999(1):起止页码.
[9] 陈永亮,焦明生,李云梅.一种柔性振动供料器产品平台的研究[J].工艺与装备,2005(期):起止页码.
[10]李云梅.一种新型振动供料器及其控制系统的研究[D].天津:天津大学机械工程学院,2005,起止页码.
[11]李云梅,陈永亮.电磁振动供料器的技术发展[J].现代制造工程,2005(期):起止页码.
[12]周亮.新型直线解耦式电磁振动供料器的控制系统设计[J].化学工程与装备,2008(期):起止页码.
[13]日本神钢电机株式会社产品样本.Advanced Vibratory technology,DualMotionPartsFeedershttp://www.Shinkoelec.co.jp,2003
[14]高晖.解耦式振动料斗产品化设计的关键技术研究[D].南京,东南大学,2008
[15]南京工学院无线电专用机械设备教研组.电磁式振动料斗的设计与计算[M].南京:出版社,1981.
[16]《电子工业专用设备设计手册》编写组编著.电子工业专用设备设计手册[M].北京:国防工业出版社,1983.
猜你喜欢
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
制造技术与机床(2019年7期)2019-07-22 03:42:06
现代机械(2018年1期)2018-04-17 07:29:48
新高考·高一物理(2016年10期)2017-07-07 12:17:11
股市动态分析(2016年24期)2017-01-07 08:56:09
股市动态分析(2016年4期)2016-09-29 08:42:21
股市动态分析(2016年25期)2016-07-23 07:31:08
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
焊接(2015年9期)2015-07-18 11:03:52
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
