无级调节偏心的旋转电弧传感器的设计与仿真
2013-08-06 01:23李湘文潘际銮洪宇翔
电焊机 2013年1期
李湘文 ,洪 波 ,潘际銮 ,刘 新 ,洪宇翔
(1.湘潭大学 机械工程学院,湖南 湘潭 411105;2.湖南工业大学 机械工程学院,湖南 株洲 412008)
0 前言
旋转电弧传感器是目前唯一不需要超前于焊枪安装的焊缝跟踪传感器。其信号采样点即为实际焊接点,响应速度快、实时性好,有很强的抗弧光、高温、烟雾和电磁干扰的能力。但现有旋转式电弧传感器的原理和系统结构都存在旋转电弧偏心调节不便、导电嘴易烧损、碳刷易损坏、机械振动和噪声较大、装配拆卸复杂、不便使用等缺陷[1-3]。
首先简单分析以往旋转电弧传感器结构,提出优化方案;然后为实现传感器偏心调节方便、抗干扰能力强、机械振动小、机构小巧灵活、成本低的特点,并具有较强的适应性和较高性价比的要求,设计出一种无级电调节旋转偏心的扫描焊炬机构;最后通过ADAMS进行仿真,验证结构的可行性。
1 旋转电弧传感器基本结构原理
目前,实现电弧旋转的方式主要有以下几种:一种是依靠导电杆端面上焊丝导出孔的偏心距来实现电弧旋转运动,导出孔的偏心距就是电弧旋转半径;一种是采用圆锥摆动直流电动机驱动和一级齿轮减速传动;还有一种是潘际銮院士和廖宝剑设计的轻巧空心轴电动机驱动旋转扫描焊炬,该机构可靠实用。
第一种机构的原理如图1所示,结构较为简单、紧凑,但由于导电杆高速旋转,导电杆的导电要通过动接触来实现,损耗较大,使用寿命降低,同时电弧旋转半径无法灵活调节[4]。第二种机构(原理见图2)由于有齿轮传动,结构较大,影响了焊炬的可达性;而且传动件会引起严重噪声,其传动件的安装精度易受烟尘污染而导致转动时系统处于受力不均衡状态[5]。最近,南昌大学机器人研究所根据圆锥摆动方案优化了旋转电弧传感器的结构[6],使传感器的最大直径保持在50mm以内,扩大了应用范围。潘际銮院士所设计的空心电机方案机构原理如图3所示,较以上两种方案减小了振动和噪声,体积也有所减小[7-8],但是调节旋转偏心的方式仍然采用机械式,不方便且不准确。
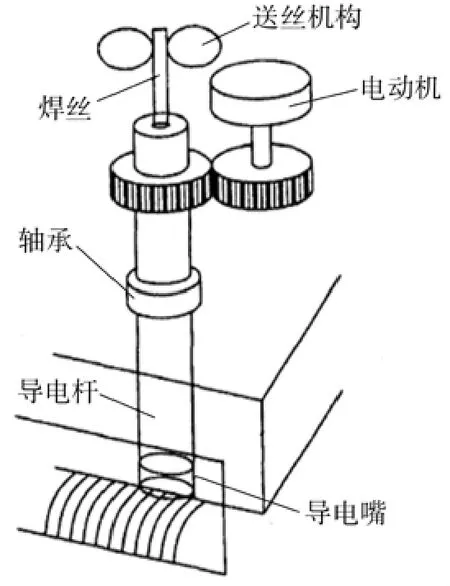
图1 电弧传感器圆锥摆动方案
2 无级电调节偏心的旋转电弧传感器结构
针对以往旋转电弧的优缺点,进一步优化传感器的结构,在此设计出一种无级电调节旋转偏心的电弧传感器结构,模型剖视图如图4所示。该传感器包括壳体4和导电杆1,壳体内部装有偏心调节平台,该偏心调节平台上装有偏心调节电机7和滚珠丝杠5,在偏心调节平台内装有由微型电机22通过齿轮驱动的旋转平台;导电杆上端与壳体的顶部形成铰链,该导电杆穿过一偏心转子与调心球轴承19形成铰链连接;导电杆下端与连接有一导电嘴的水汽保护连接头10固联,焊丝穿过导电杆旋转,并可与导电嘴12成导电紧密动配合。
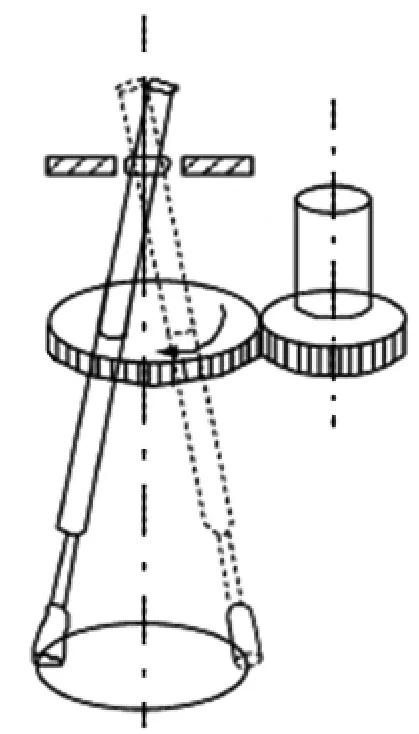
图2 电弧传感器圆锥摆动方案
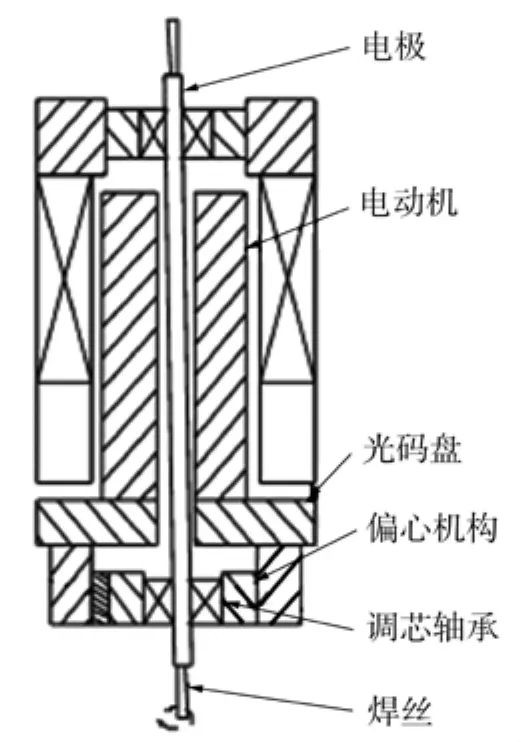
图3 电弧传感器空心电机方案
相比前面几种旋转电弧方案,该方案具有如下特点:
(1)偏心调节采用电机驱动,解决了传统机械式调节无法准确控制偏心量的缺点,实现了无级偏心调节,能精确调节旋转电弧传感器的旋转半径,并且可以根据不同的焊接规范实时调节旋转半径。
(2)该旋转电弧传感器的定位脉冲采用接近传感器获得,与以往的光电传感器相比,抗干扰能力大大增强。
(3)该结构偏心量固定为 0.25 mm,而以往的偏心量为 1~2.5 mm,偏心量缩小了 4~10 倍,从而减小了机械振动。
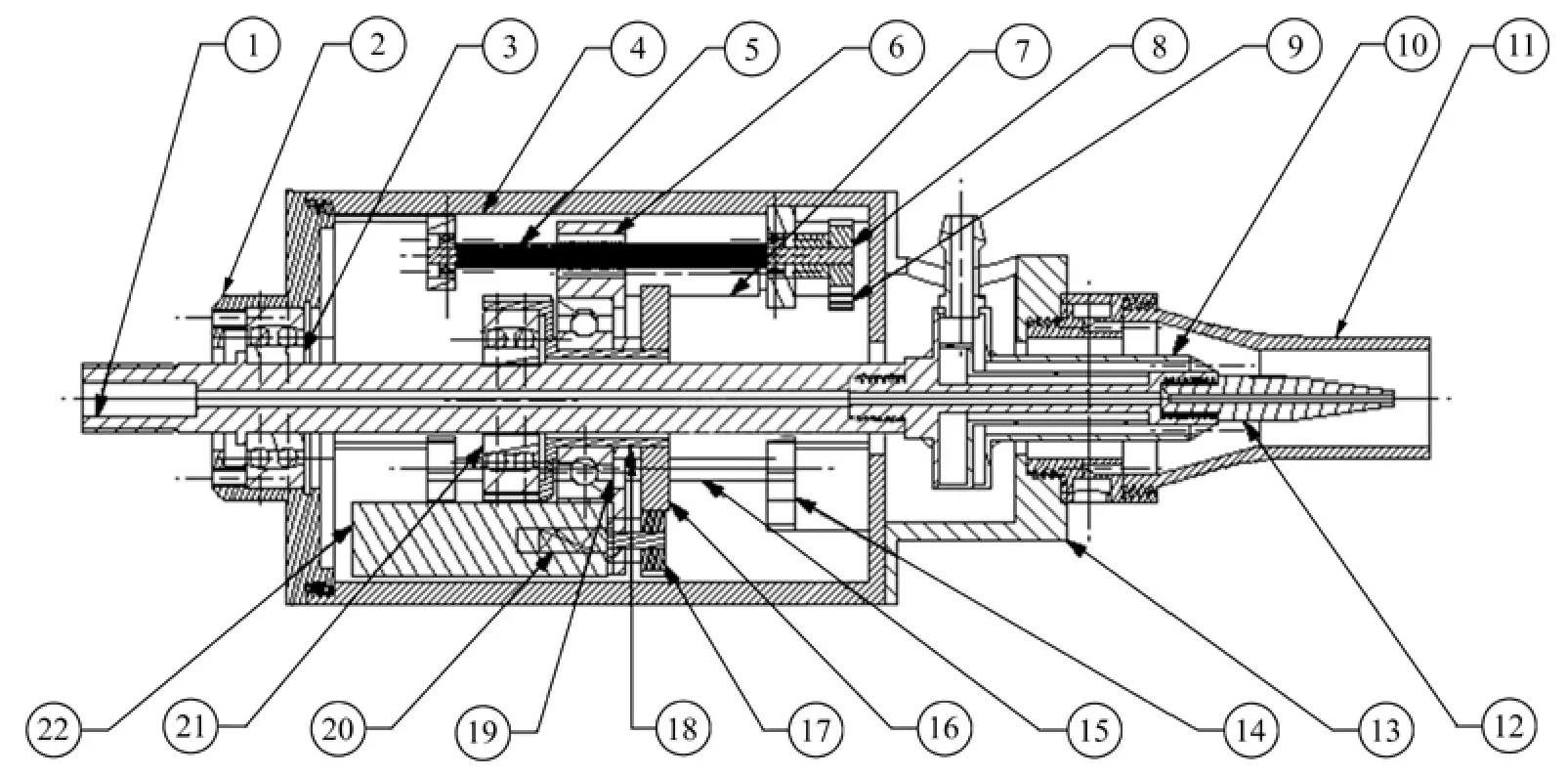
图4 无级调节偏心的旋转电弧传感器剖视图
(4)在偏心调节平台上设置了配重块,从而实现了偏心机构的重量平衡,大大减小机械振动。
(5)机构外形尺寸直径约85 mm,总长度约为105 mm,保护气罩采用CO2焊枪标准件,使传感器底部外形尺寸大大减小,传感器的可达性增加。
(6)大部分采用标准件,减低了制造成本。
3 传感器的ADAMS仿真分析
为了验证改进的旋转电弧传感器结构的合理性,应用UG软件对其进行几何建模、装配。导出Parasolid文件后,根据ADAMS仿真时的简化原则[9],将模型导入到ADAMS环境,定义构件材料属性,添加相应的约束和接触摩擦,最后对其进行运动学仿真分析。模型添加约束与接触摩擦后如图5所示。
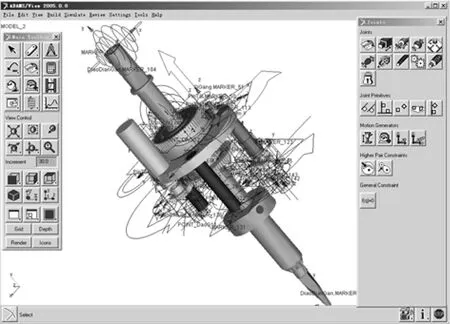
图5 简化后的电弧传感器导入ADAMS中
为了获得模型各驱动力的最大值或者代表值,为电机选型提供参考依据,在此利用ADAMS模型在运动副上添加驱动,使机构具有与真实运动近似的运动形式。为了选取一组既能体现传感器旋转半径的调节范围,又能获得旋转电机和调节电机所需的最大驱动力,仿真参数设置如下:机构完成时间为 10 s;旋转电机驱动阶跃函数为step(time,0,0,0.5,100);调心电机驱动阶跃函数为:step(time,0,0,0.5,-260)+step(time,0.5,0,3.5,0)+step(time,3.5,0,4,260)+step(time,4,0,5,0)+step(time,5,0,5.5,260)+step(time,5.5,0,8.5,0)+step(time,8.5,0,9,-260)。仿真得到旋转电机和调节电机的驱动力以及旋转半径的调节范围如图6~图8所示,验证了该机构的正确性和可行性。
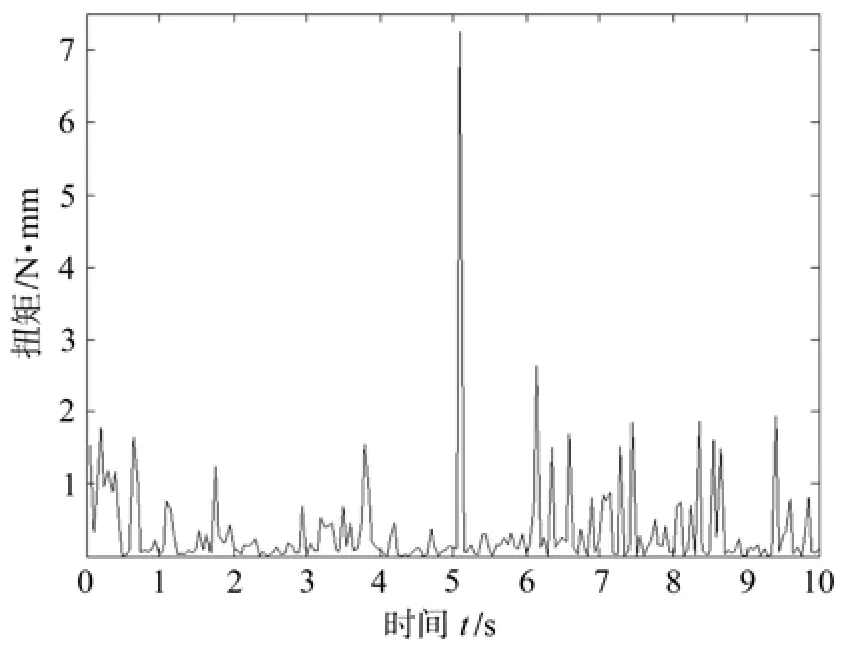
图6 旋转电机所需驱动力
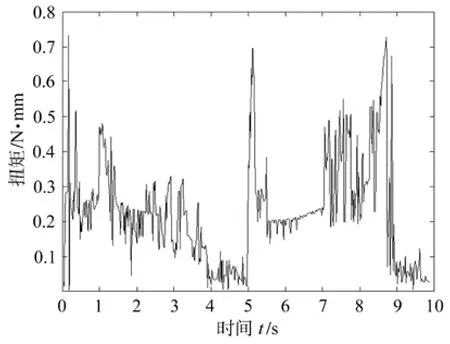
图7 调节电机所需驱动力
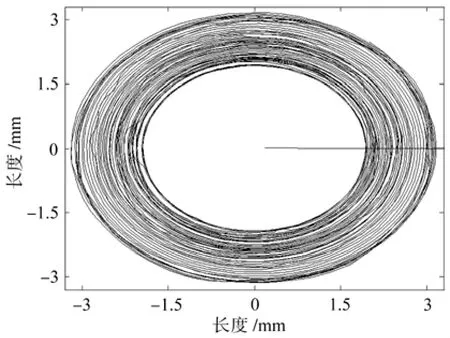
图8 旋转半径调节范围
由图6、图7可知,两电机在5 s时达到最大扭矩。这是由于调节电机带动旋转平台由静止变为向上运动,受旋转平台质量和旋转电机的约束,调节电机的扭矩达到最大值。同样,旋转电机受到调节电机给予的反作用,原本的静平衡被打断,扭矩也达到最大值。最大扭矩分别为 7.2 N·mm 和0.7 N·mm。综合各方面的参数考虑,选择直径13 mm的Maxon直流减速电机为旋转电机,调节电机选择直径8 mm的Faulhaber直流减速电机。
从图8可以发现,该机构旋转半径的调节范围为1.5~3 mm,且调节精度较高。
4 结论
通过上述分析可以看出,无级电调节偏心的旋转电弧传感器具有偏心调节方便、抗干扰能力强、机械振动小、机构小巧灵活、成本低的特点,对于扩大焊接焊缝自动跟踪领域具有较大的应用价值。
[1]潘际銮.现代弧焊控制[M].北京:机械工业出版社,2000.
[2]J.S.Tian,Lin WU.A General Algorithm of Rotating/tilting Positioner Inverse Kinematics for Robotic Arc Welding Offline Programming[J].J.of Materials Science&Technology,2001,17(1):161-162.
[3]曾松盛,石永华.基于电弧传感器的焊缝跟踪技术现状与展望[J].焊接技术,2008,37(2):1-5.
[4]Sugitani Vuji,Murayama.Development of articulated arc welding robot th high speed rotating aFC process[J].NKK Technical Review,1989(57):111-117.
[5]Jeong Sangkwun,Lee Gunyou.Development of high speed rotating arc sensor and seanl tracking controller for welding robots[A].Pusan:2001 IEEE ISIE,2001:845-850.
[6]黄凌翔,张 华.旋转电弧传感器的结构优化[J].上海交通大学学报,2008,42(S1):17-19.
[7]廖宝剑.以电弧为传感器的多自由度智能焊接系统研究[D].北京:清华大学,1993.
[8]潘际銮,廖宝剑.空心轴电机驱动的旋转扫描焊炬[P].中国专利:CN2143540,1993210213.
[9]张启先.空间结构的分析与综合[M].北京:机械工业出版社,1984.
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
智能建筑电气技术(2022年2期)2022-02-06
小天使·一年级语数英综合(2020年5期)2020-12-16
制造技术与机床(2019年9期)2019-09-10
快乐语文(2018年7期)2018-05-25
电子制作(2017年22期)2017-02-02
大连工业大学学报(2015年4期)2015-12-11
智能建筑电气技术(2015年5期)2015-12-10
小说月刊(2015年9期)2015-04-23
人生十六七(2015年5期)2015-02-28