塔筒棱管法兰自动焊接机械臂设计及仿真
2013-08-05 09:05:32武利国武建新
电焊机 2013年7期
吴 迪,武利国,武建新
(内蒙古工业大学,内蒙古 呼和浩特 010051)
0 前言
棱管与法兰的焊接轨迹为与棱管相同的多边形,焊接时运动复杂,控制难度大。本研究设计了一种棱管法兰自动焊接机械臂,在自动焊接设备的设计过程中引入焊接机器人的结构和控制方法,使得该设备兼有焊接机器人的某些优点。本研究利用建立的机械臂数学模型,编写相应的程序进行求解,利用PRO-E建立虚拟样机来验证求解的正确性,并对插补误差进行计算分析。利用该机械能够完成棱管与法兰复杂相贯线接缝的自动焊接任务[1-2]。
1 焊接机械臂运动学模型建立及求解
四自由度焊接机械臂由四个连杆组成,其中三个连杆L1、L2、L3的运动在同一主平面上,并垂直于棱管的横截面[3],如图1所示。连杆L4(焊枪)在与主平面垂直的L3和L4所在平面上运动并与水平面夹角为45°,并且在焊接过程中与棱管保持一定的焊接距离和角度,如图1所示。主平面上的连杆之间通过关节进行约束定义(B点和C点),同时初始关节与刚性固定点通过关节约束(A点),主平面上OA垂直于OE,O点距固定点A的距离为Q,距棱管的表面为P,棱管绕其中心轴线匀角速旋转,所以P的值随着时间变化。棱管的顶点F(最高点)在棱管的外接圆上,棱管边的中点G(最低点)在棱管的内切圆上,如图2所示。
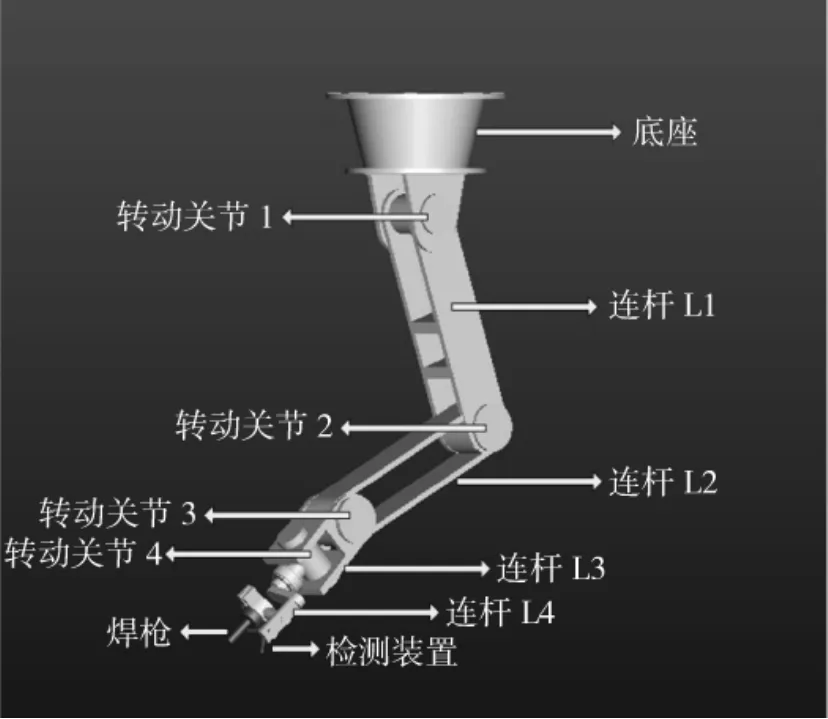
图1 四自由度焊接机械臂
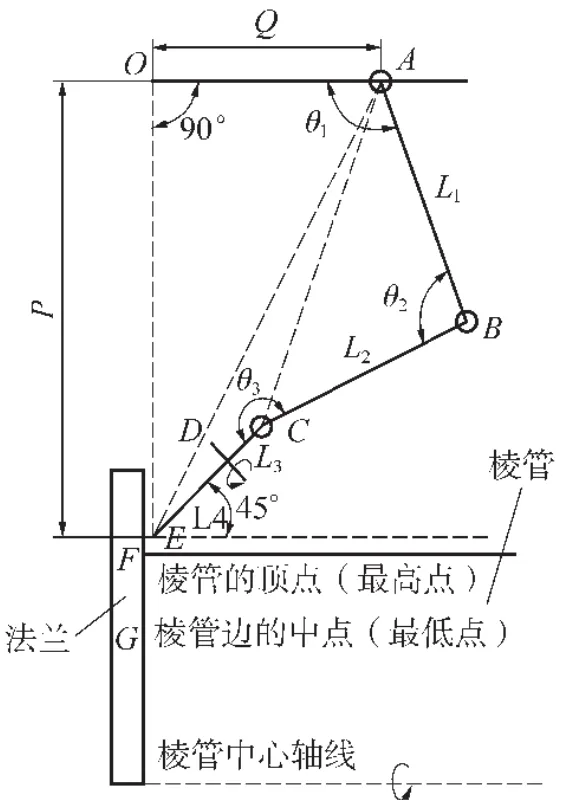
图2 焊接机械臂结构示意
在焊接过程中,棱管按一定角速度绕中心轴线转动,在主平面上棱管高度在顶点与边的中点之间变化,P的长度随之变化。由于转动中棱管边的斜率随着时间变化,要保证焊接距离为10 mm以及焊枪与焊缝成 60°~80°夹角[4],焊枪要时刻调整位姿满足角度要求,焊枪转动产生位置变动使P、Q产生变化。当棱管的角速度确定以后,焊枪的转角是有关于时间的函数,P、Q可以相应的确定。用几何法求逆解[5],主平面上的三个杆长为 L1、L2、L3,现已知L3相对于地面坐标系的位姿,通过逆运算,可得到θ1、θ2、θ3的数列。做辅助线 AC 和 AD(图 2 中的虚线部分)。在三角形OAE中
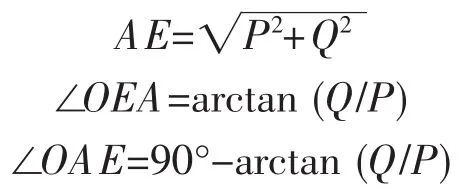
在三角形ACE中
∠AEC=45°-∠ACE=45°-arctan(Q/P)
由余弦定理可得出

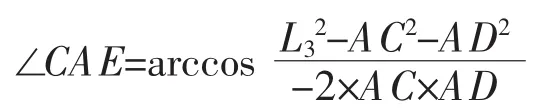
在三角形ABC中

可得出
1.1 焊枪和棱管的运动形式和关系
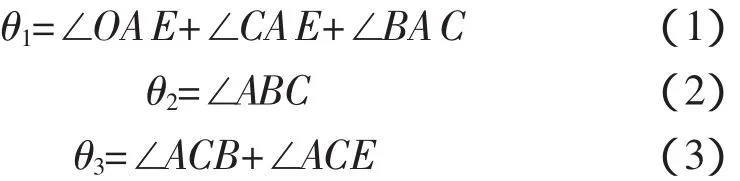
L4是机械臂的焊枪部分,在与主平面垂直的L3所在平面上,焊枪部分可绕关节四转动转动,转角为φ,如图3所示。
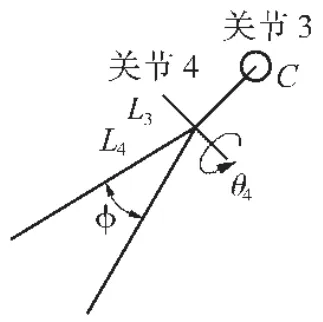
图3 焊枪的运动形式
当棱管逆时针旋转α角度时,为了保证焊枪与管壁保持一定角度,焊枪要相应的旋转β角度。棱管旋转时所带来的在焊接距离的变化,还有焊枪转动时所带来的焊接距离的变化总和为h,如图4所示。为了保证焊枪头与工件之间的焊接距离在规定范围内,在焊接过程中补偿差值,以保证焊接质量。焊枪在每个周期内都旋转β角,β角可由焊枪长度与棱管的尺寸参数求得,如图5所示。

图4 焊枪与棱管的相对运动姿态
图 5 中△ABC 相似于△ODC,AB∶OD=BC∶DC,BC+DC=a(a为棱边的一半),AB、OD、a已知,可求出BC长度,从而可求得β角。
图5 求β角度
1.2 焊接过程的周期划分
把棱管转动一圈分成8个周期,每个周期为从棱管一边中点转动到相邻的下一边中点,这样每个周期焊枪的运动是相同的。再把每个周期的运动分为4个小周期,如图6~图9所示。第一个周期棱管的顶点由a点绕棱柱圆心旋转到b点,焊枪由1位置旋转到2位置。第二个周期棱管的顶点由b点绕棱柱圆心旋转到c点,焊枪由2位置旋转到3位置。第三个周期棱管的顶点由c点绕棱柱圆心旋转到d点,焊枪由3位置旋转到4位置。第四个周期棱管的顶点由d点绕棱柱圆心旋转到e点,焊枪由4位置旋转到5位置。

图6 运动周期1
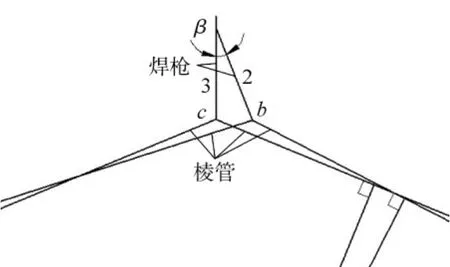
图7 运动周期2
1.3 Matlab编程及求解[6]
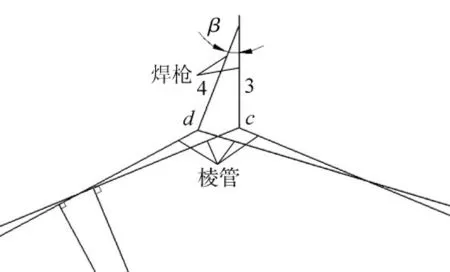
图8 运动周期3
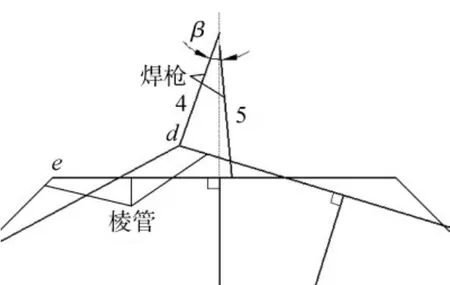
图9 运动周期4
式(1)、式(2)、式(3)三个方程都是关于变量P、Q 的方程,周期性的检测出 P、Q 的值,θ1、θ2、θ3可相应的求出唯一值。在此选用Matlab 7.1编程来进行求解。所得各关节角度如表1所示。在Matlab中生成时间与各关节的关系,由于时把间分成了400个时间点,这里只列出18个时间点中各关节的角度。图中第一列为插补时间,第二到第四列为四个关节的角度。
2 插补误差控制
焊接过程中,随着棱管的转动,焊枪转动与棱管要保持60°~80°夹角,焊枪尾部在Y轴上移动。棱管的中心距焊接位置的变化为直线变化,这样就形成了焊枪的圆弧运动来插补焊接位置的直线变化。插补过程中采用定时插补,这种插补方式易于自动化焊接机床的控制系统的实现。每隔t秒中断一次进行一次插补,计算并输出一次给定值。从焊接开始的初始位每隔一个插补周期取一个点,取了五个点,焊枪从a点运动到e点,如图10所示。每个周期棱管旋转β角度。现将图中焊枪端点位置放大。如图11所示,可以看出在焊接插补过程中,弧ab与直线ab的间隙最大,所以现分析ab段最大误差[7]。
2.1 插补误差的计算
采用2500线编码器,4倍频,分辨率10000 cts/rev。图 12 中,杆长 L,初始位置 a(x1,y1)与 Y 轴夹角为α。一个单位脉冲时间焊枪旋转β角,a运动到b(x2,y2),可求直线 ab 方程为
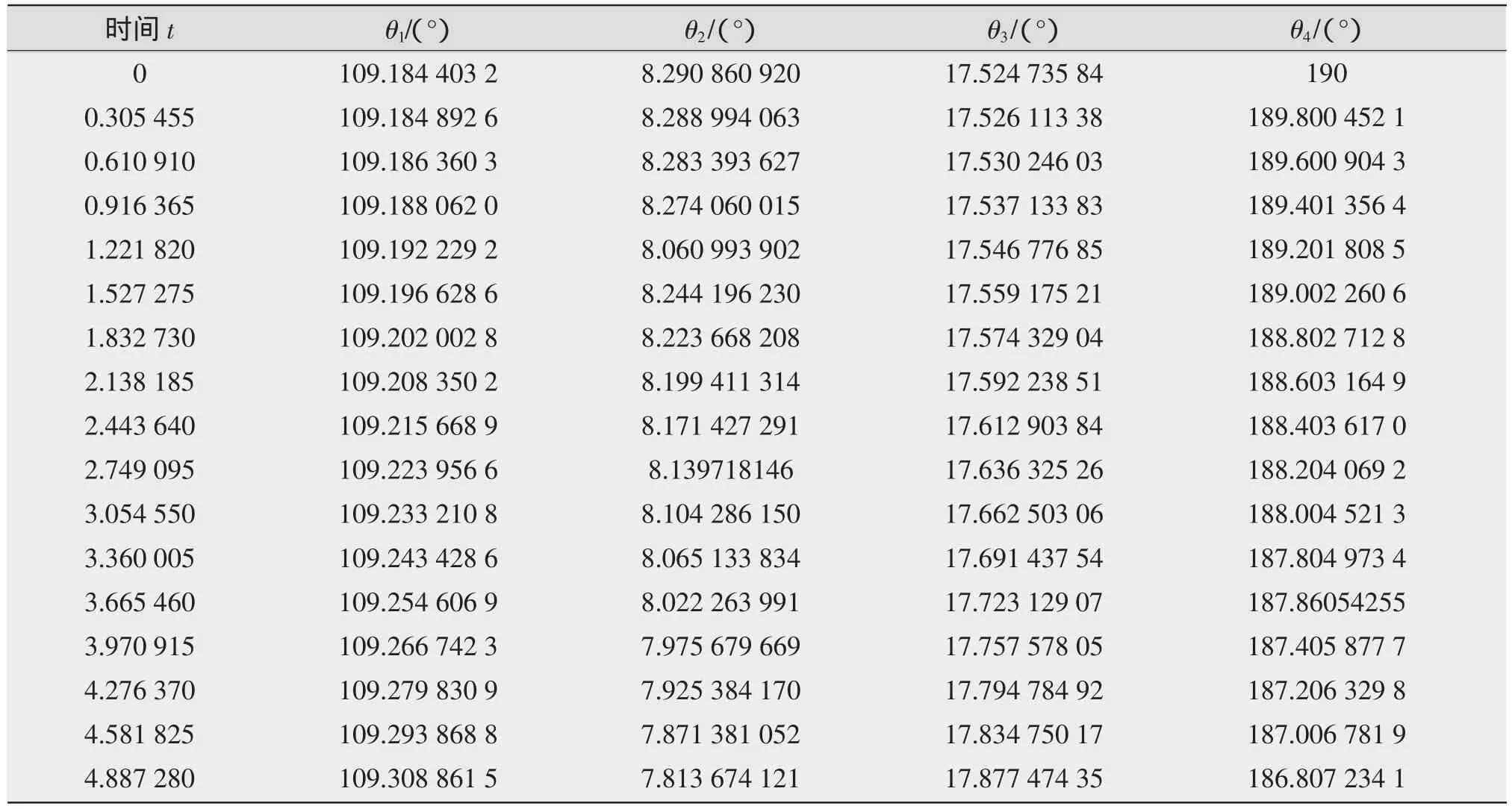
表1 所得各关节角度

图11 焊枪端点位置放大

弧ab上动点由a到b的轨迹方程为

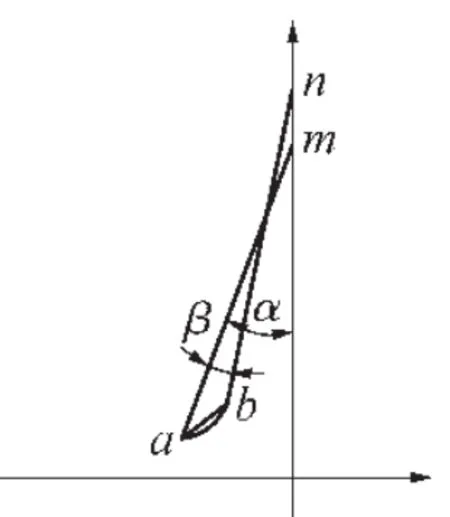
图12 求直线ab方程
将一个单位脉冲按时间等分n份,可求焊枪轨迹与弧ab、直线ab的交点间的距离。根据两点间距离式(4)可以求得弧ab到直线ab的最大距离d。计算值为0.009 1 mm,小于规定的最大误差值

3 机械臂运动学仿真
通过PRO-E建立焊接机械臂的模型,通过装配等形式及约束条件,将关节部分和棱管的旋转轴定义销钉约束,如图13所示,其他装备定义为刚性约束。模型建立好后,在应用程序的机构选项中显示装配关节定义无问题,开始添加电机驱动,电机驱动为图9中4个旋转箭头所示。将Matlab中运算的值以tab格式保存,在电机的编辑定义中导入,完成仿真[8]。图14为焊枪头运动轨迹曲线,可以看处曲线闭合并符合个周期运动特点。
4 结论

图13 PRO-E运动仿真点的轨迹
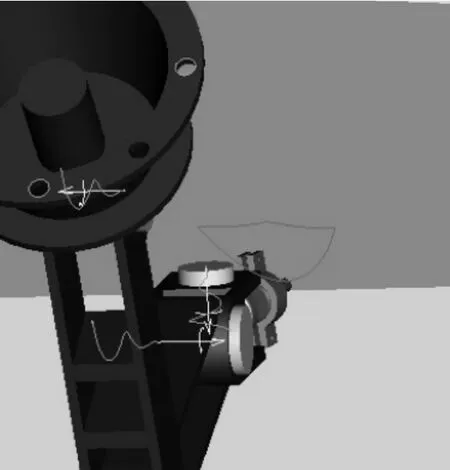
图14 PRO-E运动仿真变的轨迹
利用几何运算,通过Matlab运算功能自编程序对四自由度机械臂的逆运动学进行求解,并没有采用传统使用Matlab的Robotics Toolbox工具箱对该机械臂进行建模求解。将编写的求解逆运动学程序编制成一个函数,通过定义其中的输入输出参数,就可求解四杆机械臂末端执行器在工作范围内变化过程中各关节的变化。确定运动参数并分析计算插补误差。通过PRO-E运动仿真对机械运动过程可视化,验证是否达到工作要求。
[1]李晓辉.汪苏焊接机器人智能化的发展[J].电焊机,2005,35(6):39-41.
[2]林尚扬,陈善本,李成桐.焊接机器人及其应用[M].北京:机械工业出版社,2000.
[3]陈鲁刚,平雪良.平面三自由度机械臂的轨迹规划及仿真[J].工具技术,2011,45(9):26-30.
[4]中国机械工程学会焊接学会编.焊接手册(第2版)[M].北京:机械工业出版社,2001.
[5]梶田秀司.仿人机器人[M].管贻生译.北京:清华大学出版社,2007.
[6]石辛民,郝整清.基于MATLAB的实用数值计算[M].北京:北京交通大学出版社,2006.
[7]尹 萍.自动焊接机床运动控制算法研究与软件系统开发[D].山东:山东大学,2006.
[8]林清安.Pro/ENGINEER野火3.0中文版动态机构设计与仿真[M].北京:电子工业出版社,2005.
猜你喜欢
现代农机(2022年3期)2022-07-11 11:42:12
作文小学高年级(2022年3期)2022-04-20 08:17:04
装备制造技术(2020年9期)2021-01-26 00:14:42
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
福建中学数学(2018年1期)2018-11-29 02:52:14
现代装饰(2018年5期)2018-05-26 09:09:39
37°女人(2017年8期)2017-08-12 11:20:48
滇池(2017年7期)2017-07-18 19:32:42
中国三峡(2017年2期)2017-06-09 08:15:29