
北斗系统导航定位报告体制与工程技术
2013-07-25 05:18谭述森
导航定位学报 2013年3期
谭述森,李 琳
(北京卫星导航中心,北京 100094)
1 引言
20世纪70年代美国海军陆战队和陆军联合投资,研制集通信、导航定位、识别于一体的定位报告 系 统 (position location reporting system,PLRS)[1],该系统为 UHF频段420-450MHz、时分多址的综合性战术数据系统,能为步兵、地面车辆、坦克、飞机、两栖登陆舰等提供服务,可将各作战单元的位置、速度等信息传送至指挥控制中心。但一个PLRS最多容纳400个用户,基本工作区域仅50km×50km,定位精度15m;扩展工作区域300km×300km,定位精度有所下降;还不是真正的定位报告系统。
21世纪10年代建成的中国北斗卫星导航系统(BeiDou navigation satellite system,BDS)是真正意义上的导航定位报告系统。该系统采用卫星无线电导航定位报告体制 (radio determination satellite system,RDSS),即基于卫星无线电测量实现卫星无线电导航、定位报告和短报文通信等业务。与 “全球定位系统 (global positioning system,GPS)定位+铱星全球移动通信”相比,具有性价比高,位置报告简单、自主、安全、快速,双业务融合等诸多优势。
本文扼要论述了北斗卫星导航系统 (以下简称北斗系统)RDSS理论基础,以及出站、入站波束设计,信号频率及调制方式设计,双向距离和观测量分解、校正与平滑,自主导航载荷与定位报告链路融合设计等工程关键技术的解决途径。
2 导航定位报告概念的发展
导航定位报告概念随着用户需求的增长以及导航手段的进步而发展,其基本定义分别描述如下。
定位:确定物体在地球坐标系的位置及时间的业务,英文术语为positioning,随人类有计划的生产而产生。
导航[2]:确定运动物体在地球坐标系的位置矢量、速度矢量及时间的业务,英文术语为navigation service,随天文测量学而产生。
无线电导航[3]:应用无线电测量确定物体位置矢量、速度矢量、时间及障碍物告警的业务,英文术语为radio navigation service(RNS),起源于20世纪40年代。
卫星无线电导航[4]:应用卫星发射的无线电信号,通过距离、距离变化率的测量,确定用户在地球坐标系确定时间下的位置矢量、速度矢量及障碍物告警的业务,英文术语为radio navigation satellite service(RNSS),起源于20世纪60年代[5-6]。
定位报告[7]:由导航系统确定用户位置,由数据链完成位置报告的业务,英文术语为locating reporting service(LRS),起源于20世纪80年代。
卫星无线电导航定位报告:基于卫星无线电测量实现卫星无线电导航、定位报告和短电文通信的业务,RNSS是其子集。卫星无线电导航定位报告体制由北斗系统于20世纪70年代率先创立,具有诸多独特性能[8]。
3 RDSS理论基础
三球定位原理是空间物体定位的理论基础。构建用户与卫星、地面测量与控制中心 (measurement control center,MCC)的闭环距离测量链路以及通信信道是定位报告的理论核心。融自主导航载荷于闭环距离测量链路,是导航定位一体的理论核心。
3.1 双星定位报告原理
双星定位报告根据两颗卫星、用户、MCC的闭环距离测量链路以及通信信道实现用户定位及位置报告。双星定位报告原理如图1所示,两颗卫星中一颗为无线电定位 (radio determination,RD)卫星,另一颗为无线电导航 (radio navigation,RN)卫星。RD卫星的有效载荷为出站、入站变频转发器,RN自主导航载荷和上行注入等。RN卫星的有效载荷为RN自主导航载荷和上行注入等。
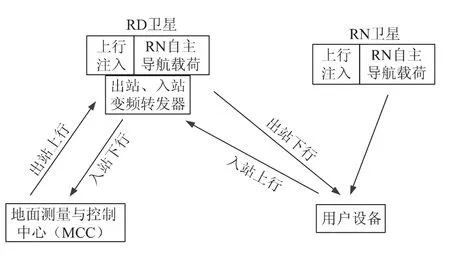
图1 双星定位报告原理
工作过程具体如下:
(1)MCC按北斗时 (BDT)同步格式产生本地钟测量信号;
(2)RD卫星、RN卫星1按照发射自主导航载荷模式连续发射导航信号;
(3)用户设备测量RD卫星的RN信号伪距ρRDRN和RN卫星1的RN信号伪距ρRN1。在RD卫星的RN信号指定时刻发射入站信号,并将伪距测量值ρRDRN、ρRN1传回 MCC;
(4)MCC根据用户设备的入站信号,获得MCC↔RD卫星↔用户设备的双向距离和观测量2Rm,即
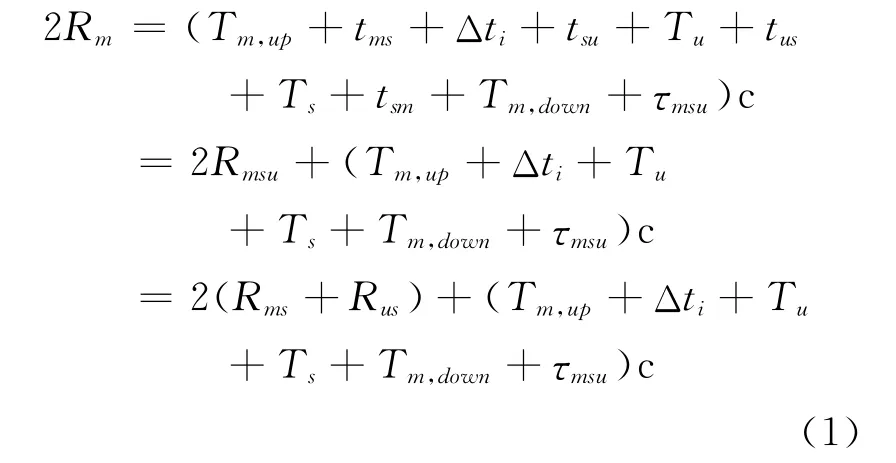
式中,Tm,up为 MCC的上行设备传输时延,tms为MCC→RD卫星的空间路径传播时延,Δti为RD卫星与BDT的钟差,tsu为RD卫星→用户设备的下行空间路径传播时延,Tu为用户设备传输时延,tus为用户设备→RD卫星的空间路径传播时延,Ts为RD卫星入站转发器时延,tsm为RD卫星→MCC的空间路径传播时延,Tm,down为MCC的下行设备传输时延,c为光速,2Rmsu= (tms+tsu+tus+tsm)c为MCCRD卫星用户设备的双向空间距离和,Rms为MCC至RD卫星的空间距离,Rus为用户设备至RD卫星的空间距离,τmsu为MCCRD卫星用户设备的双向电离层时延。
(5)根据 MCC设备时延Tm,up及Tm,down、卫星钟差Δti、用户设备时延Tu、卫星入站转发器时延Ts和电离层时延τmsu,对双向距离和观测量2Rm进行校正可得2Rmsu;根据RD卫星、RN卫星1位置(由卫星轨道确定)、MCC位置可得Rms;再由2Rmsu=2(Rms+Rus)可得用户设备至RD卫星的空间距离Rus。
(6)由伪距ρRDRN、ρRN1及Rus等得到用户设备至RN卫星1的距离RuN1

式中Δti2为RN卫星1的钟差。
(7)根据地理高程库查得用户设备所在点的大地高h,按照下式计算地心至用户设备的距离

式中,r为用户设备参考椭球面上的投影至坐标原点的距离,θ为用户设备所在点的矢径与参考椭球法线的夹角。
(8)MCC根据Rus、RuN1和s组成如式 (4)所示用户三维位置的解算方程组,进而实现用户定位及位置报告
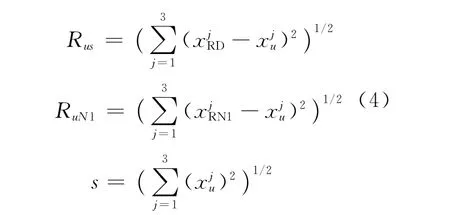
式 中, ()j=1,2,3为 RD 卫 星 位 置 坐 标,)j=1,2,3为 RN 卫星1位置坐标,()j=1,2,3为用户位置坐标。
特别需要指出:步骤 (7)根据地理高程库查用户所在点的大地高时,需已知用户位置,但用户位置为待求量,因此需迭代计算。迭代过程为:首先由概略高程和观测量计算概略坐标;然后由概略坐标查取新高程;如此迭代3次左右即可保证用户位置坐标精度优于20m。
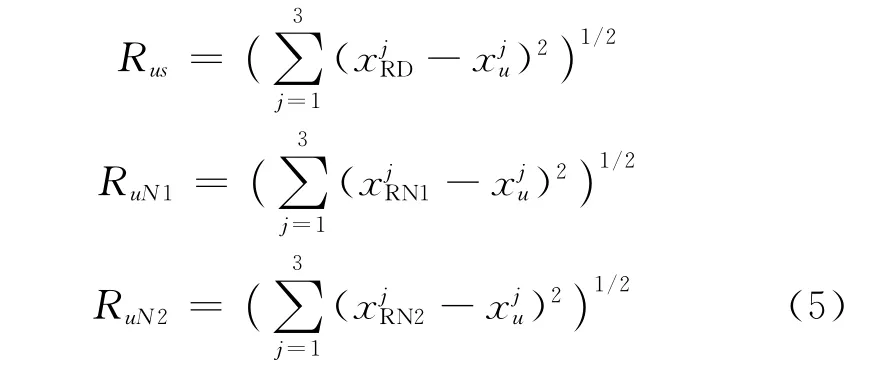
3.2 三星定位报告原理
在图1中再增加1颗RN卫星,同理可得用户至第2颗RN卫星的距离RuN2;用其取代式 (4)中的s可得,式 (5)所示基于3颗卫星的用户位置解算方程组
3.3 多星定位报告原理
当用户可观测多颗RN卫星伪距时,有如下用户位置解算方程组
当i=2为三星定位,i≥3为多星定位。
MCC根据大量的伪距观测量获得用户精密位置。当伪距观测量的积累时间超过2min时,用户位置精度可达1m。
当然i≥4时,用户也可不发射入站响应信号,直接建立基于RN卫星伪距观测量的用户位置解算方程,但精度比MCC解算精度低。
4 RDSS主要特色
BDS与GPS、伽利略卫星导航系统等系统的根本区别在于:BDS采用集导航、定位、位置报告和短报文通信于一体的RDSS,具有以下主要特色。
(1)性价比高
只需14颗卫星就可实现中国及周边地区、30°遮蔽角的定位报告服务,只需30-35颗卫星就可实现全球地区、45°遮蔽角的定位报告服务。若采用“GPS定位+铱星全球移动通信”方案,仅实现全球地区、20°遮蔽角的定位报告就需390颗卫星。BDS RDSS的性价比优势不言而喻。
(2)位置报告方式简单易行、独立自主
BDS用户向MCC的位置报告,只需观测2-3颗卫星即可实现,无需其它通信系统辅助。利用GPS向运营管理、生命救援等机构的位置报告,必须首先观测4颗卫星实现定位,而后经由其它通信系统才能实现位置报告。
(3)位置报告方式安全可靠
用户位置是MCC根据用户设备入站信号对双向距离和进行测量、分解、校正,而后位置解算得到的。用户位置参数并没有经由通信信道传输,规避了在通信信道传输路径上被窃密的风险,且降低了系统复杂度。
(4)位置报告响应速度快
利用双星、三星定位报告方式,从用户开机至完成用户位置报告的时间不超过1s;从用户开机至完成用户位置精密定位 (精度优于1m)报告的时间约2min,是获取1m精度位置坐标最快的方式。
(5)融导航、定位报告于一体
导航、定位报告两种业务在体制内集成,用户既可通过无源方式在无线电静默条件下实现中、高动态条件下的连续导航,又可通过有源方式实现用户位置报告和不同用户之间点对点双向短报文通信。
(6)抗干扰优势明显
由于位置报告仅需2-3颗卫星,若处于干扰多为低仰角来向的电磁环境,可充分利用地形地物遮挡干扰,经由2颗高仰角卫星实现精度优于100m的定位报告;若处于干扰立体分布的复杂电磁环境,只需形成2个高增益、窄波束确保对2颗卫星的接收性能即可实现定位报告。
5 RDSS关键技术
RDSS关键技术主要有出站下行、入站上行波束设计,出站、入站信号频率及调制方式设计,双向距离和观测量分解与校正,自主导航载荷与定位报告链路融合设计,双向距离和观测量平滑与位置解算滤波等。
5.1 出站下行、入站上行波束设计
RD卫星天线的出站下行波束、入站上行波束是决定服务区的重要因素。若RD卫星天线能实现对地球1 000km高度的覆球覆盖,就可为近地卫星提供定位报告服务。
卫星天线根据波束宽窄可分为覆球波束、区域波束和点波束。对静止卫星来说,覆球波束的宽度较宽,增益较低,在地球表面上的覆盖区域呈球冠状;点波束的宽度较窄,增益较高,在地球表面上的覆盖区域小。
为使导航定位报告的服务区最大,且出站、入站用户容量尽可能大,出站下行波束、入站上行波束宜采用多波束赋形天线以实现宽波束。
5.2 信号频率及调制方式设计
信号频率设计是决定服务区的另一个重要因素,且直接关乎双向距离和测量的电离层校正精度、复杂度,以及卫星、MCC、用户设备的收发(接收与发射)隔离度。
为使服务区尽可能大,出站下行信号频率宜选择BDS B1频点而非S频点,原因在于B1频点赋形波束比S频点赋形波束的覆盖范围大。
为使电离层校正精度高、复杂度低,出站上行信号、入站下行信号频率宜选用C频段或更高频段,以便MCC与卫星之间的电离层时延效应可忽略不计。这样,四段、四频距离和观测量中的电离层延迟主要取决于卫星与用户之间的上行、下行信号频率。若上行、下行信号频差较小,可按如下等效频率fc进行电离层时延校正。

式中,fu、fd分别为上行、下行信号频率。工程试验表明:当fd取为BDS B1频点,且fu与其频差小于70MHz时,既可使卫星与用户之间电离层校正精度优于1ns,电离层校正复杂度低;又易实现收发高隔离度。
至于出站、入站信号的调制方式宜采用抗干扰、抗多径能力强的直接序列扩频调制等调制方式,信号带宽宜选择10-20MHz。
5.3 双向距离和观测量分解与校正
为满足定位报告精度,双向距离和观测量的实时分解与校正十分重要。由式 (1)可知:双向距离和观测量中包含空间路径传输时延、设备时延、卫星钟差和电离层时延等。因空间路径传输时延、电离层时延等与空间路径、信号频率直接相关;而空间路径包括MCC至卫星、卫星至用户、用户至卫星、卫星至MCC四段,信号频率包括出站上行信号、出站下行信号、入站上行信号、入站下行信号4个频率;所以双向距离和观测量的分解、校正十分困难。
为方便双向距离和观测量的分解与校正,结合5.2节作如下设计:(1)MCC与卫星之间的信号频率采用电离层时延效应可忽略不计的C、Ku以上频段; (2)卫星与用户之间的信号频率采用传输特性稳定、空间扩散损耗小的L频段,且fu与fd的频差小于70MHz。例如:fd取为BDS B1频点1 575.42MHz,fu在卫星移动业务频段1 610MHz-1 660MHz选取。
至于双向距离和观测量中的设备时延、卫星钟差等,可通过在服务区内布设标校机 (置于已知点位的用户设备)进行精确校正。
5.4 自主导航载荷与定位报告链路融合设计
为实现自主导航载荷与定位报告链路的深度融合,RN卫星的有效载荷设计为RN自主导航载荷和上行注入等;RD卫星的有效载荷设计为出站、入站变频转发器,RN自主导航载荷和上行注入等;定位报告链路入站上行信号帧长度为出站下行导航信号帧长度的整数倍;还有RN卫星钟差获取,高精度时间同步等时间链统一设计要点,在此不一一赘述。
5.5 双向距离和观测量平滑与位置解算滤波
由于用户在双向距离和测量期间,可连续获取RN卫星的观测伪距以及RD卫星RN信号的观测伪距,因此MCC应对双向距离和观测量进行平滑,对用户位置解算进行滤波等处理。
对于固定及低动态用户应根据其动态性能、位置报告实时性、入站数据量等,精心设计用户伪距的观测时段以及伪距观测量的数目。
6 RDSS方案示例
BDS卫星导航定位报告体制中的RD卫星可以是静 止 地 球 轨 道 (geostationary earth orbits,GEO)卫星、倾斜地球同步轨道 (inclined geosynchronous orbits,IGSO)卫星和中圆轨道(medium earth orbits,MEO)卫星。后两种卫星可使服务区内用户设备对卫星的观测仰角增大,利于提升用户设备的抗遮蔽性能。
BDS RDSS结合卫星星座、卫星载荷等的合理配置,可实现一定服务区内高遮挡角的导航定位报告业务。
方案一:中国及周边地区、遮蔽角30°的导航定位报告方案
为实现中国及周边地区遮蔽角30°的导航定位报告业务,卫星星座配置为5GEO+5IGSO+4MEO,其中5颗GEO卫星分别定点在58.75°E,80°E,110.5°E,140°E和160°E;IGSO卫星轨道倾角55°,IGSO-1、IGSO-2及IGSO-3卫星星下点轨迹重合,交叉点经度为118°E,相位差120°,IGSO-4、IGSO-5卫星分别与IGSO-1、IGSO-2同平面备份,交叉点经度为95°E;4颗MEO卫星分别位于 Walker24/3/1星座的第一轨道面7、8相位,第二轨道面3、4相位,轨道高度21 528km、倾角55°,第一轨道面升交点赤经为0°。
GEO-1、GEO-2和 GEO-3卫星为 RD 卫星,其余11颗卫星均为RN卫星。
RD卫星的出站下行波束为北斗系统B1频点覆球波束,入站上行波束为北斗系统L频点赋形波束。
方案二:中国及周边地区、遮蔽角45°的导航定位报告方案
为实现中国及周边地区遮蔽角45°的导航定位报告业务,在方案一基础上,再增加IGSO-1、IGSO-2和IGSO-3这3颗RD卫星;其余8颗卫星为RN卫星。这种卫星星座和卫星载荷设计可确保中国及周边地区45°遮蔽角的导航定位报告业务,以及全球大部分地区 (亚洲、欧洲、非洲、太平洋、印度洋、北冰洋等)5°遮蔽角的导航定位报告业务。
非中国地区内用户的入站检测服务由RD卫星中的IGSO卫星完成,其入站观测量由IGSO进入MCC。
方案三:全球地区、遮蔽角45°的导航定位报告方案
为实现全球地区遮蔽角45°的导航定位报告业务,卫星星座配置为5GEO+5IGSO+24MEO。
GEO-1、GEO-2、GEO-3卫星,IGSO-1、IGSO-2、IGSO-3卫星以及8-12颗 MEO 卫星为 RD卫星,其余20-16颗卫星为RN卫星。
7 结论
北斗系统RDSS具有性价比高,位置报告方式简单易行、独立自主、安全可靠,位置报告响应速度快,导航、定位报告业务体制内融合和抗干扰优势明显等诸多特色。北斗系统导航定位报告系统是满足现代信息化社会用户信息共享的优良系统,具有广阔的应用开发前景。
[1]李大光.影响未来战争演变的军事高技术[M].北京:兵器工业出版社,2011.
[2]卢福康.天文测量学[M].北京:中国人民解放军总参测绘局,1981.
[3]朱洪波,谢飞波.国际电信联盟无线电通信标准术语及定义:无线电导航业务[M].北京:人民邮电出版社,2008.
[4]谭述森.卫星导航定位工程[M].2版.北京:国防工业出版社,2010.
[5]KAPLAN E D, HEGARTY C J.Understanding GPS:Principles and Applications[M].2nd ed.Boston:Artech House,2006.
[6]李跃,邱致和.导航与定位—信息化战争的北斗星[M].2版.北京:国防工业出版社,2008.
[7]王小同.定位报告系统[M]//中国军事百科全书:军事测绘学科分册.2版.北京:中国大百科全书出版社,2007.
[8]谭述森.广义RDSS全球定位报告系统[M].北京:国防工业出版社,2011.
猜你喜欢
出版人(2022年11期)2022-11-15
信息通信技术(2022年2期)2022-05-31
今日农业(2021年19期)2021-11-27
数学小灵通(1-2年级)(2021年10期)2021-11-05
成都信息工程大学学报(2021年6期)2021-02-12
通信电源技术(2020年8期)2020-07-21
舰船科学技术(2020年3期)2020-04-22
探索科学(学术版)(2020年1期)2020-03-26
电子制作(2019年23期)2019-02-23
人大建设(2018年7期)2018-09-19
