
模糊控制优化三岔路口交通
2013-07-24 05:08:58李洪中刘旭宁朱汉东
电子测试 2013年1期
李洪中 刘旭宁 朱汉东 郭 虎
(1.兰州交通大学电子与信息工程学院 兰州 730070;2.山东省青岛市91206部队航材保管教研室 青岛 266108)
0 引 言
随着社会经济的快速发展,人民的生活水平的提高,私家车快速走进千家万户,随之也带来一定的问题,许多城市甚至出现“拥有最宽阔的道路,也拥有最宽阔的停车场”。对于生活的必需品“行”,开始困扰城市的发展,已经变的不得不加以重视。于是从改变人们的出行考虑,一种快速便捷安全环保的交通环境必须走上时代的舞台,为人们带来福利,为社会带来更健康的发展。由于基于十字路口的调节方案研究较多,而就城市中大街小巷、居民小区等三岔路口的交通状况研究较少。于是本文就此目的出发,提出了一种改善三岔路口交通状况的可行性优化方案。
当前我国大多数城市交叉口的平均行车速度已限定在20 km/h 以下,同时,由于车辆速度减慢、汽车尾气排放量增加,造成城市空气质量的恶化。为了能缓解经济发展给交通运输带来的压力,使得现有资源能发挥出最大的作用,我国政府也加大了对智能交通系统的研究及建设力度。采取智能交通系统的交叉口具有两大优点:
首先,有效的提高交通运输效益,使交通拥挤降低20%,延误损失减少10%~25%,车祸降低50%~80%,油料消耗减少30%;
其次,解决道路交通堵塞、减少财产损失、减少环境污染,增强了交通的安全性,合理的利用了土地与能源。
交叉路口城市机动车辆的不断增加,使得车辆堵塞现象越来越严重,当前大多数城市仍然采用的是定时控制交叉路口交通灯的控制方法。交通控制就是确定交叉口红绿灯的信号配时,使通过交叉口的车辆延误时间尽可能小。传统的控制一般是采用模型控制或者是预先人为地设定多套配时方案,由于道路上的车流量具有较大的随机性,所实施的相位控制也应随车流量的不同而相应变化。而交通警察在实际的交通指挥中可以根据实际路况信息来控制交通,如果东西方向的车流量大,则其放行时间长;南北方向车流量小,则其放行时间短。
模糊控制理论是在交通系统中模仿交警的控制经验实现的智能控制方案,可以使车辆等待延误时间最小,因此基于模糊控制理论的交叉路口信号灯控制系统的研究对解决交叉路口车辆堵塞有重要的现实意义。
1 系统设计方案
由于我国的交通控制发展起步较晚,传统的控制方案一般主要采取定时信号灯的方法。对于曾经不是很拥挤的交通状况,这种方案还是可行的。然而随着车流量的指数增加,它已经不再适应新的复杂交通情况的改变,它不能随着交通量的大小实时改变,这种方案给交通带来极大地不便,于是需要一种合适的方案来改变这种技术的落后,以减少道路网络中所有车辆的延误时间,方便人们出行。为达到目的,本系统采用模糊智能控制,即更加经济,也不用再为时时停车而烦恼。
本系统通过模糊控制方法,实时的采集和检测交叉路口的车流状况,通过分析处理后,调整各个方位的通行时间,达到合理快速的通行。通过运用摄像头采集路口近端的图像信息计算出近端的车流量,同时还可以通过实时视频信息处理交通路口的突发事件等相关信息。通过运用传统的环形线圈来采集远端离交叉口一定距离处通过的车流量,表示红灯期间滞留车辆量数。根据不同路口的不同交通状况及其交通环境,远端的传感器离路口的距离可根据实际而定。本系统作为研究方式,取远端离路口距离L=150 m。具体系统设计方案如图1 所示。
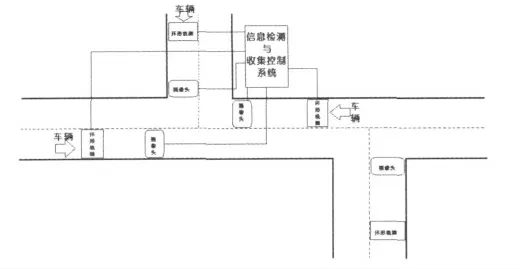
图1 系统设计方案
2 模糊控制在系统中的应用
2.1 模糊控制原理
模糊控制由于无需知道被控对象的数学模型,具有较强的鲁棒性和逼近能力好等特点,广泛应用于难于获得精确数学模型、非线性和大滞后系统的控制。在模糊控制器的设计中,需要解决两个主要的问题:其一是如何获得模糊控制规则;其二是如何确定模糊子集的隶属函数。
本系统通过视频采集及其传感器采集,实时获取路口的车流量,对其模糊化作为系统输入。根据输入车流量的实际情况以及曼达尼(Mamdani)控制规则,将绿灯延迟时间作为输出,同时系统采取简单三角隶属函数逼近。
2.2 摄像头采集车流量的模糊化
视频检测基本理论:视频检测系统一般包括图像获取、图像采集、图像检测和信息传输部分。图像获取一般采用摄像机,图像采集一般采用图像卡或者其他图像采集设备,图像检测一般利用工控机的软件检测或者DSP 实现,而信息的传输主要是把采集到的运动车辆信息的状态传输给信息控制中心或者其他终端。对交通场景中车辆对象的实时检测是基于视频的交通检测系统中的很重要也是基本的步骤。对摄像机采集到的视频图像序列进行处理通过适当的检测算法对车辆进行检测,根据检测结果可以得到交通的信息参数,如流量、车速等。本系统通过对视频信息的分析处理,得到车流量信息以及突发事故相关信息。
为了实现模糊控制,可以将绿灯通行时间分为固定时间(t1)与可变时间(t2)两部分。固定的时间根据具体路况信息可以确定不同阈值,即实现一般通行时间的最小值。我们在这里以研究为主,设定t1=15 s。可变时间即为我们要控制的输出时间,设为t2。
按要求通过路口的车辆车速不超过20 km/h。于是可简略计算出15s 内通过路口的车辆数近似为15 辆([20*1 000 m/(60* 60 s)]* 15 s/5.5 m 其中假设车辆密集行走时车辆长加相邻间距最大为5.5 m)。
设由摄像头采集而得到的车辆数为A。则对其进行模糊化,给出其模糊子集为{很少(VF)、少(F)、中(M)、多(R)、很多(VR)},其隶属函数如图2 所示。

图2 摄像头采集通过路口车辆数A 的隶属函数
2.3 环形线圈采集车流量的模糊化
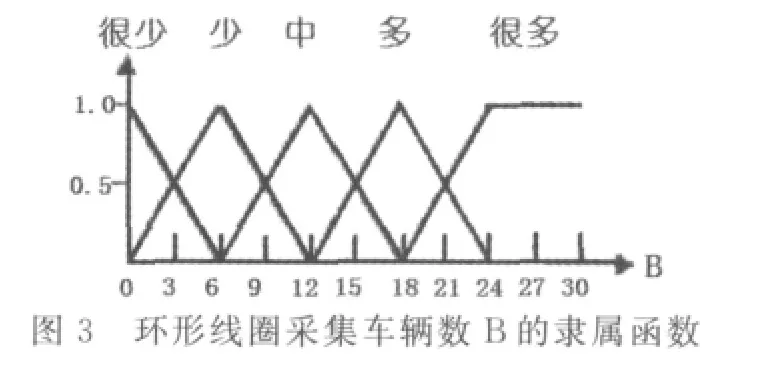
我们假设远端传感器离路口的距离L=165 m。那么假设每个车辆连同车间距的平均距离为5.5 m。则165 m内能够滞留的最大车辆数为30 辆。
于是可以设红灯期间滞留的车辆数为B,其论域为{很少(VF)、少(F)、中(M)、多(R)、很多(VR)},其隶属函数如图3 所示。
2.4 模糊决策输出的模糊化
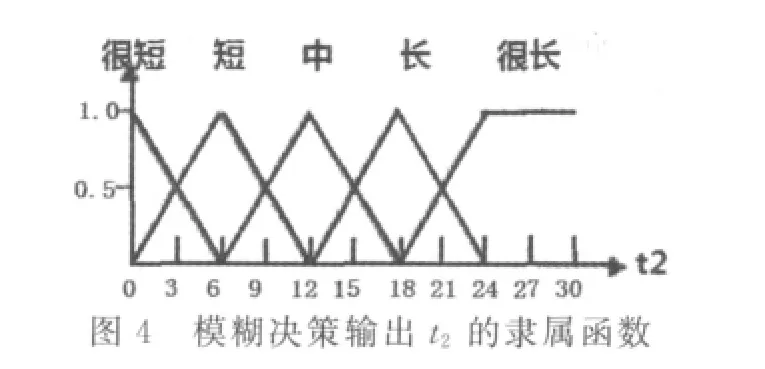
根据具体路况信息,给出最大通行时间Tmax=t1+t2max。对流量不是很大的路口,设最大通行时间为45 s。则此时t2max=30 s。根据不同的通行状况,即输入数据的不同得到不同的输出。即时间输出为T=t1+ t2。其中t2是指经过去模糊化后得到的输出。对t2进行模糊化的过程如下:设其论域为{很短(VS)、短(S)、中(M)、长(L)、很长(VL)},其隶属函数如图4 所示。
2.5 模糊规则设计
本系统采取传统的曼达尼(Mamdani)型模糊规则编辑器实现规则的控制,也即if…then…语句。整理成为矩阵表的形式,如表1 所示。

表1 模糊规则设计表
2.6 反模糊化
对输出进行反模糊化,得到t2的具体数据,从而实现了对路口的智能控制。反模糊化有多种实现方案,这里采取面积中心算法。即:

式中:μi为确定的输入值A、B 所对应的不同模糊子集的隶属度;
τi为输入模糊子集所对应的重心值。
3 测试结果与分析
3.1 隶属函数表
摄像头采集车流量隶属函数如表2 所示。
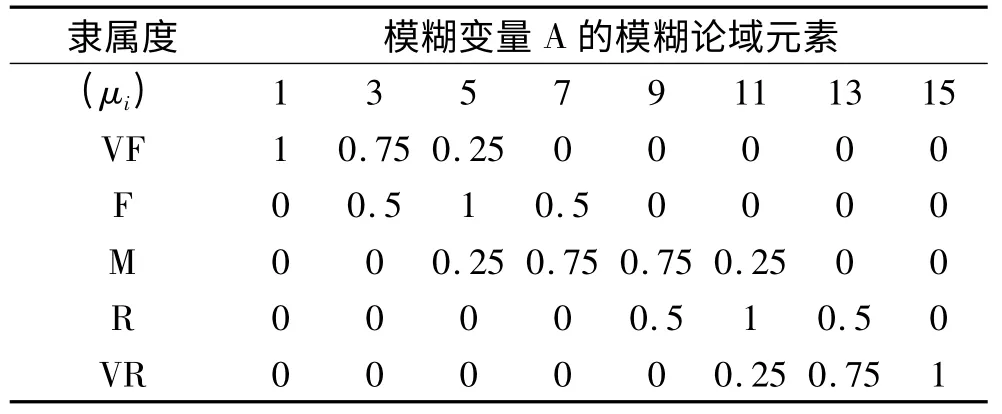
表2 模糊变量A 赋值表
环形线圈采集车流量的隶属函数表如表3 所示。
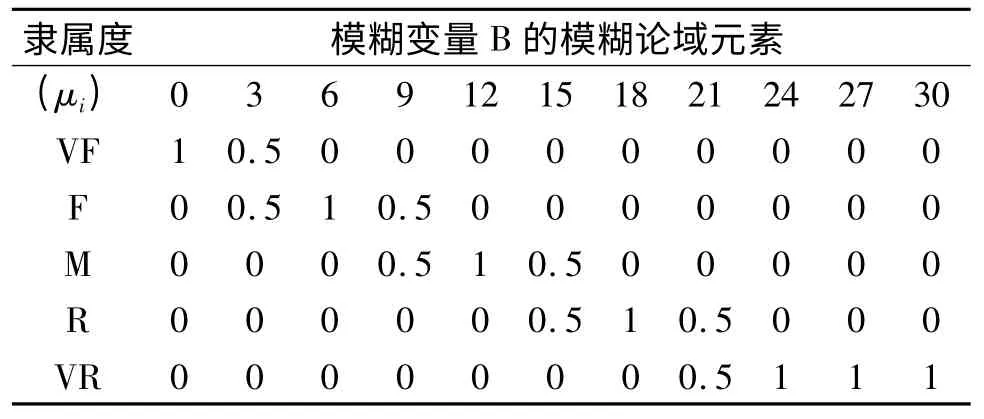
表3 模糊变量B 赋值表
模糊决策输出的隶属函数表如表4 所示。

表4 模糊变量t2赋值表
3.2 仿真结果分析
利用公式(1)以及以上实验数据,可以给出整个实验系统的最终t2结果的查询表格,如表5 所示。
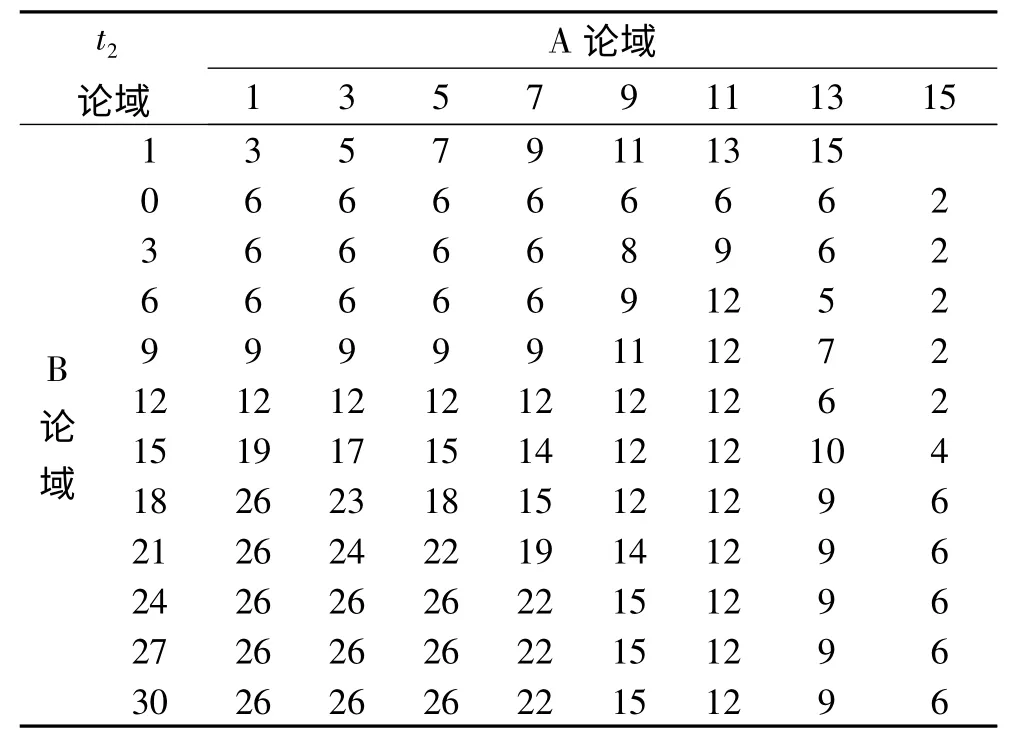
表5 模糊控制规则查询表
以上表中数据可以通过图2~图4,表1~表4 以及公式(1)计算而得,任举一例:设A=3,B=15。
此时:μX(VF)=0.75,μX(F)=0.5,μY(M)=0.5,μY(R)=0.5;这时可以激活四条模糊规则:(1)IF A is VF and B is M,then t2 M.此时τ1=12,故t2(1)=0.5* 12=6;
(2)IF A is VF and B is R,then t2 VL.此时τ2=25.5,故t2(2)=0.5* 25.5=12.75;
(3)IF A is F and B is M,then t2 M.此时τ3=12,故t2(3)=0.5* 12=6;
(4)IF A is F and B is R,then t2 L.此时τ4=18,故t2(4)=0.5* 12=9;
则有t2=(6+12.75+6+9)/(0.5+0.5+0.5+0.5)=16.875,进位小数部分,故取t2=17。表格其他数据采用类似方式求得。
以通过交叉口的平均车辆延误时间作为评价指标来衡量模糊控制的控制性能。假设各方向车辆达到路口的情况是随机的,且服从泊松分布,并设饱和流量为3 600 量/h。间隔采样为1 分钟,进行多次MATLAB 仿真进行比较,每次仿真为5 个周期,结果见表6。
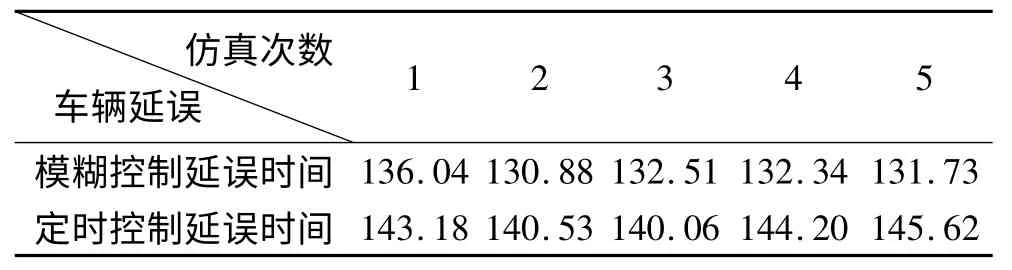
表6 模糊控制与定时控制的仿真结果比较
由上表实验数据可以得到模糊控制的平均车辆延误时间为132.7s/辆,而定时控制则为142.72s/辆,由此可见,模糊控制的方法比定时控制方法车辆延误时间减少了7%,更能适应交通量的随机变化。
4 优化系统时间显示方案
由于系统采取模糊控制的方法来控制整个系统的交通绿灯时间,这样就会造成每次通行时间都不是固定的问题。这样子不能给整个系统提供倒计时显示,给通行车辆带来了很多不便,会让司机无法适从。于是从解决这个问题的角度出发,提出了一种优化系统时间显示的方案,已达到人们习惯的倒计时显示。
将绿灯通行时间T 做一个等分划分,即将每次获得的结果T 平均后倒计时显示出来。不过这时候的通行倒计时时间闪烁一次不一定再是1 s,而是T/N s。这样子就达到了给行人提供参照的标准,达到了预期的目的,即达到了智能控制车辆通行,又可以为行人提供心理准备,从而实现了预期的便捷通行目标。
5 结论与展望
通过模糊控制实现了车辆延误时间最短的问题,通过平均实时通行时间,达到了人们习惯的倒计时通行显示的目的。整个系统解决了三岔路口的复杂交通状况,并且根据人们实际的通行习惯进行了优化。当然,对于像诸如北上广这样的国际大都市,经常会出现各个路口均是一条长龙的现象,此时,无论何种控制方案都很难解决交通阻塞现实。这就需要政府、公民等各方面相互协调,来更好的解决交通拥挤现实,以实现畅快的通行。
[1]石辛民,郝整清.模糊控制及其MATLAB 仿真[M].北京:清华大学出版社,北京交通大学出版社,2008.
[2]田宇.基于模糊原理的城市交通信号灯控制方法的研究[J].北华航天工业学院学报,2010,3(20):1673-7938.
[3]折志伟,贾辉然,姜文东,高娜.基于车辆通过频率的智能交通控制器研究[J].河北工业科技,2010,3(27):1008-1534.
[4]魏永超.基于SOPC 的视频车辆检测技术研究[J].计算机技术与发展,2011,5(21):1673-629X.
[5]李宇成,李雷,王目树.多车道的车流量统计[J].自动化仪表,2010,2(10).
[6]邓宜阳.用PLC 实现道路十字路口交通灯的模糊控制[J].成都大学学报:自然科学版,2001,2(20):1004-5422.
[7]易俊华.城市交叉路口交通信号模糊控制系统的设计与实现[D].南京:中南大学,2010:1-67.
[8]周春蕾.基于FPGA 技术交通灯智能控制系统的研究[D].石家庄:河北科技大学,2010:1-47.
[9]Mariagrazia Dotoli,Maria Pia Fanti.Fuzzy adaptive traffic control:application to an isolated intersection[EB/OL].http://dee.poliba.it/LabControlli/file_pdf/Eunite2004.pdf.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
数学教学通讯·初中版(2015年5期)2015-06-17 15:33:29
中国交通信息化(2014年6期)2014-06-05 03:12:07
电视技术(2014年19期)2014-03-11 15:38:21
