
农业温室温度的智能辨识控制
2013-07-20 01:33宋海声赵学深刘平和
计算机工程与应用 2013年21期
宋海声,赵学深,刘平和
西北师范大学物理与电子工程学院,兰州 730070
农业温室温度的智能辨识控制
宋海声,赵学深,刘平和
西北师范大学物理与电子工程学院,兰州 730070
1 引言
在农作物生长环境中,为保证农作物温度适宜,通常采用温室密闭环境,使农作物达到最佳生长条件,此时进行温度调控,可以有效提高作物产出率[1-2]。在建立系统模型时,被控对象具有不同程度的滞后现象,采用PID(Proportion Integration Differentiation)控制器由于算法简单、可靠性较高等优点,被广泛应用在控制领域中[3-4],然而被控对象往往会产生较明显超调量和较长时间调节过程,降低了系统稳定性,常规PID控制器达到最优化控制效果。
针对农业温度控制系统,建立含有农业温度控制数学模型。在LI-RBF(Learning and Improvement RBF)辨识器与农业系统响应并接成补偿环节,使系统消除滞后项,进一步跟踪辨识系统,提高控制质量。LI-RBF-PID控制器中,拥有RBF神经网络结构简单、学习速率快等优点,并优化控制参数,可以相互配合又相互制约的比例、积分和微分作用实现农业温度控制,达到良好的性能。
2 农业温度控制原理及模型
由于不同地理环境对农作物培养方式不同,建立的农业温度控制模型效果也有所不同。本文分析温室本身环境因素对农业温度的影响,提出含调节控制量的农业温度数学模型[5-6],如式(1)。
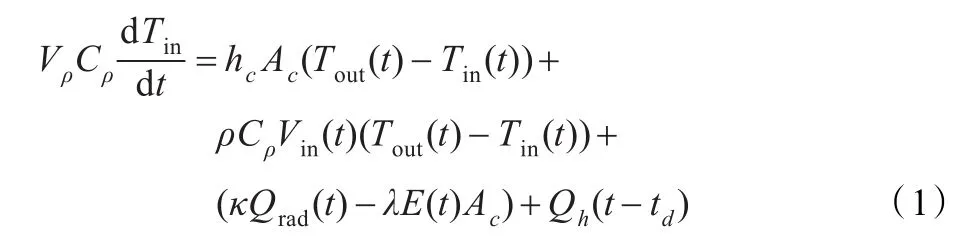
由式(1)右边可知通过温室内地表交换的热量、通风时温室内外的热量交换、作物蒸腾作用吸收的热量和温度调节量设备所调节的热量。
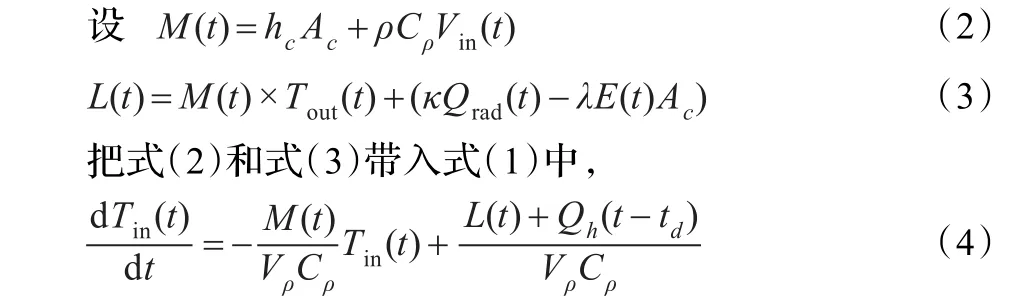
M(t)是受到温室温度影响变量,其中有温室内气体定容比、温室体积和温室内自然通风率等内部变量。L(t)是由室外温度Tout(t)、农作物蒸腾速率λE、温室太阳辐射Qh(t)等环境变量构成。由此可知,温室温度系统是一个复杂、时变参数的系统。
对式(4)两边进行拉氏变换,整理得到:

由上式可知,可以将农业温度控制系统考虑为扰动情况的惯性加时滞环节。传统的惯性加时滞环节中,K是系统静态增益,T是系统时间常数,是系统纯滞后时间。综合上述农业温度模型与典型的惯性加时滞环节比对分析,可以得到式(6)传递函数:
3 智能辨识控制设计
3.1 RBF神经网络算法

x(n)∈y(k+1)为网络输入向量,cj(n)为高斯函数中心矢量,cj=[cj1,cj2,…,cjN],σj(n)为宽度参数,j为网络隐单元数目,||·||为欧式范数。
整个网络输出为:

在RBF网络中,隐含单元执行是固定不变非线性映射,将输入空间映射到一个新空间,输出层在该新的空间中作为线性组合器,可调节参数是网络权值,隐单元高斯函数的中心及宽度[7]。
每个隐单元输出为:
wi(n)为隐层第i个神经元与输出单元之间网络权值。
经过对RBF神经网络算法学习,文章提出LI-RBF算法。
3.2 LI-RBF神经网络算法
由于RBF神经网络不存在局部极小特征,可以最佳逼近系统辨识能力,使其在模式识别、优化控制和自适应控制等多领域应用广泛。但是系统精度不高、隐含节点中心向量很难计算等问题,这也是该网络中应该解决并努力改进的问题,并且寻找特定环境下解决问题的方法。本文提出LI-RBF神经网络,如图1所示。

图1 LI-RBF神经网络结构图
设x=[x1,x2,…,xn]=[y(k),…,y(k-ny+1),u(k),…,u(knu+1)],其中,y(k)和u(k)分别是k时刻系统模型输出值和输入值;ny和nu为输出阶数和输入阶数;y(k)和u(k)作为LI-RBF神经网络输入向量,当前时刻系统输出信息是LIRBF神经网络输出向量ym(k)。利用本文中的LI-RBF优化算法,进行网络训练,逼近实际输出值yd(k)。
网络学习从只有一个隐层神经元网络开始,当满足以下条件,需要网络加入新的隐单元:

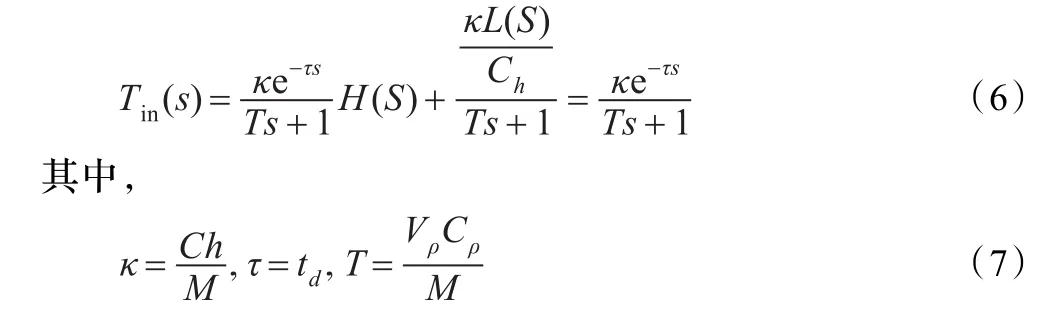
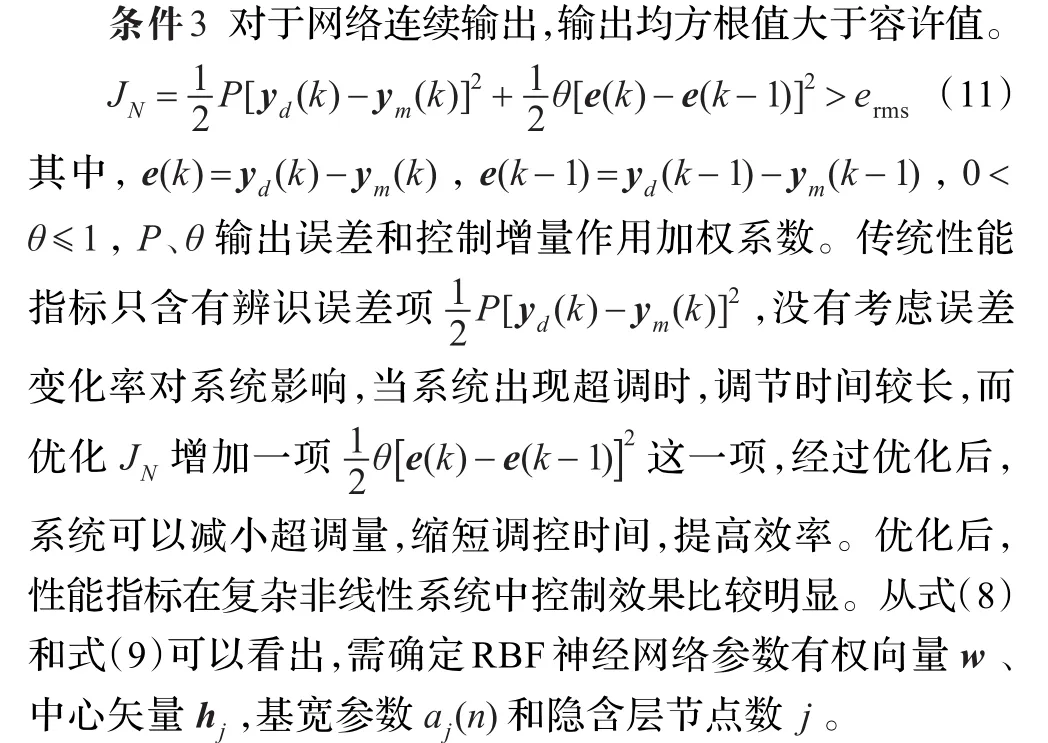
yd(k)是第k时刻农业温度实际输出,ym(k)是神经网络系统第k时刻室内温度输出,emax为容许精度。这样提高了算法本身的精度,不易出现过拟合问题。
条件2输入数据已远离存在中心,表明已存在中心没有很好反应输入数据分布模式。因此,把隐单元输出公式改为式(8)所示,加入适当系数a和b,使LI-RBF神经网络输入值在有效映射区域内全面映射。网络输入向量幅度值x与a成反比,与b成正比,当x比cj大时,通过a作用处理后的网络输入值x接近a提高了系统辨识非线性映射能力。
所以,在网络学习初步阶段,由于隐单元数目较少,网络对要逼近函数产生一个粗糙表示,新颖性条件很容易满足,所以LI-RBF径向基神经网络会通过分配宽度越来越小隐单元来修正表示,当系统按期望精度调整后,就停止分配新单元,并按照条件式(2)和式(3)进行再次优化,最终预测结果输出。
3.3 LI-RBF网络辨识器设计
优化后,隐含层至输出层权值w为:
优化后,隐含层节点的宽度参数迭代法调整公式为:
优化后,隐含节点的中心向量的迭代法调整公式为:
Jacobian矩阵即为输出对控制输入变化,取LI-RBF网络第一个输入x1=u(k)。灵敏度算法为:

3.4 LI-RBF-PID控制器设计
由PID控制器为线性控制器可知[8-9],根据被控对象输出yd(k),网络输出ym(k)构成偏差e(k)进行控制。
控制器输出为u(k):

kp,ki,kd分别为比例、积分、微分系数。LI-RBF-PID控制是将PID控制规律融入到神经网络之中新型控制器。该控制器提供系统辨识能力,在线调整PID控制器kp,ki,kd,PID三项输入为:
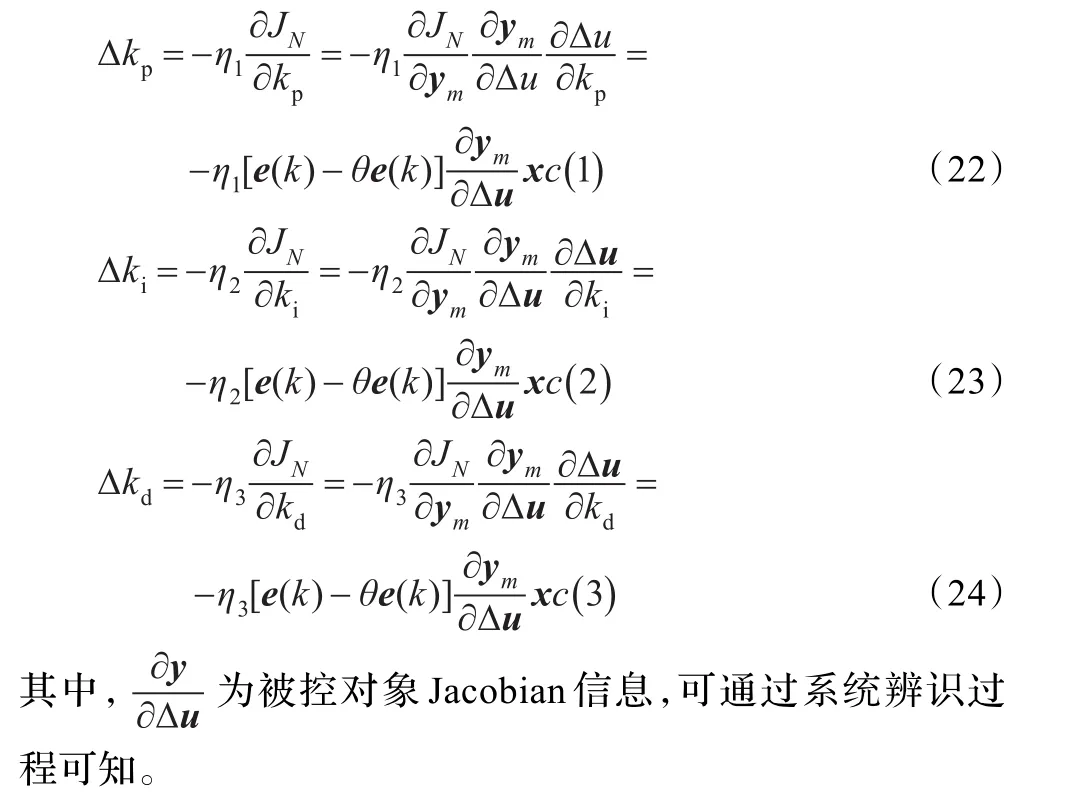
其中,kp,ki,kd调整采用梯度下降法。
3.5 LI-RBF-PID农业温度控制系统的设计
农业温度控制系统结构图如图2所示。
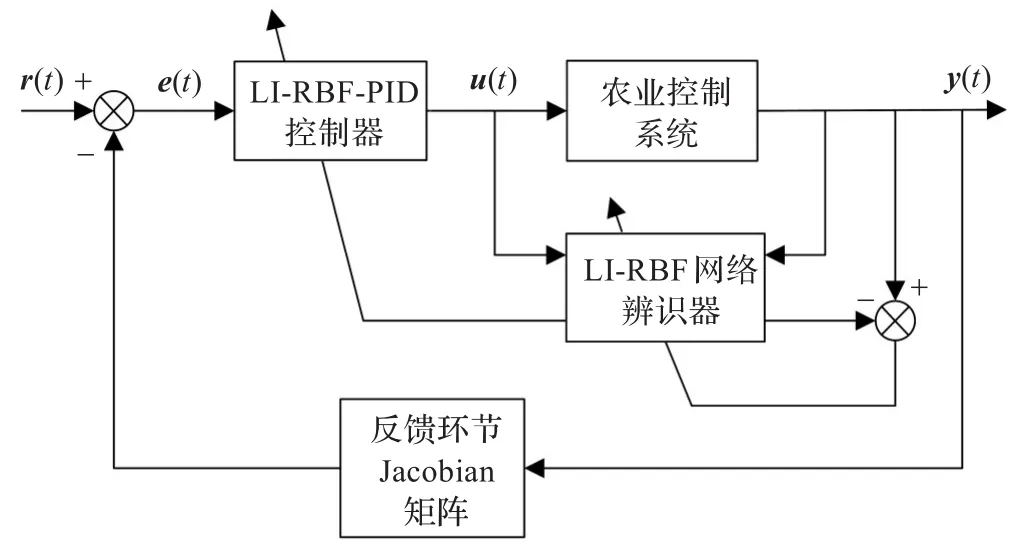
图2 农业温度控制系统结构图
LI-RBF网络辨识器采用Delta函数和迭代法设计神经网络权值调节率,获取了权值自适应调节过程,从而获得闭环系统的稳定性,有效提高了系统的精度。
在RBF-PID控制器基础上利用LI-RBF神经网络辨识器的自适应能力,调整控制器控制参数,构成一个具有自适应能力的控制器。在神经元学习算法中,借助算法的优化,优化二次型性能指标的思想,在加权系数的调整中引入二次型性能指标,使输出误差和控制增量加权平方和最小来调整加权系数,从而间接实现对输出误差和控制增量加权的约束条件。采用梯度下降法来调节kp,ki,kd,使控制器达到精准输出。综上可以寻找优化后的农业温度控制系统。
4 辨识控制研究
为了验证文本LI-RBF神经网络控制效果[10-11],对其进行了实验。以西北地区洋芋为实验对象,对农业温度系统进行研究分析,系统采用公式(6)所示模型。
4.1 LI-RBF神经网络农业温度系统模型辨识器仿真结果
LI-RBF网络辨识器三个输入为,ym(n),ym(n-1),输入信号采用方波信号u(t)=1.0sgn(sm2πt)。采用LI-RBF神经网络进行训练,经过训练实验后,选取隐含层L=9,输入节点数N=4,学习速率η1=η2=η3=0.1,动量因子α1= α2=α3=0.5,系数a=0.5,b=2。输出误差P=0.2。控制增量加权系数Q=0.1。条件1和条件3中的容许精度分别为0.05和0.15。LI-RBF神经网络对农业温度模型的辨识曲线,如图3所示。图4为传统RBF神经网络对模型的辨识曲线。
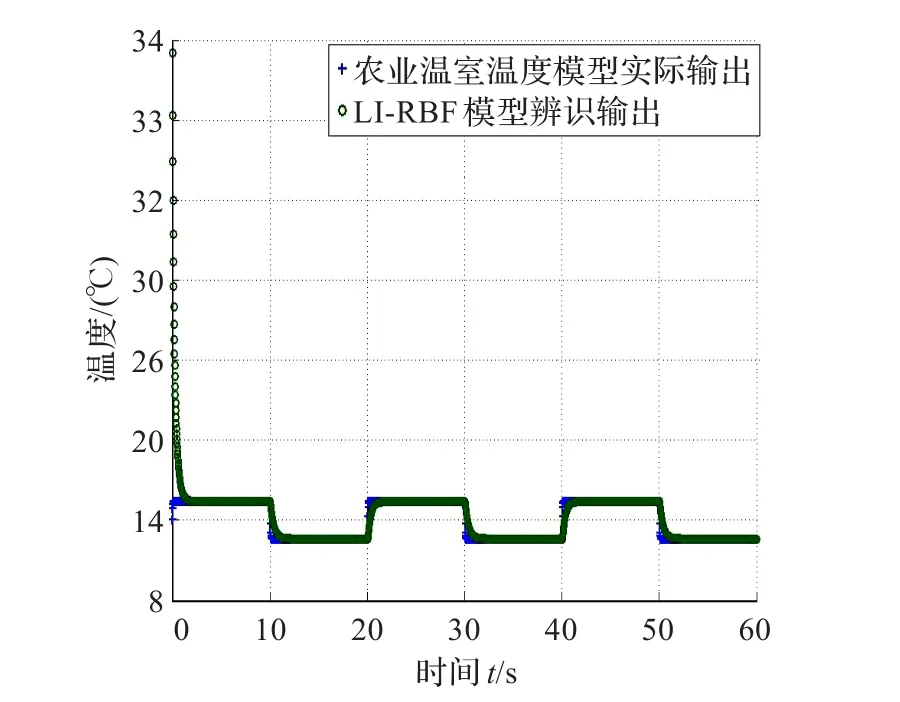
图3 LI-RBF神经网络对农业温度模型的辨识曲线
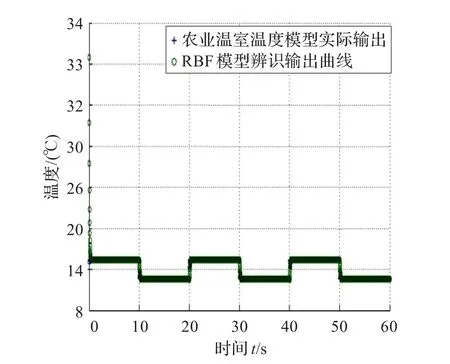
图4 传统RBF神经网络对模型的辨识曲线
从图3可以看出,LI-RBF神经网络算法,能够更加有效和完整地跟踪辨识效果,提高精度,抗干扰能力强,并随这农业温度环境变化有效调节温室内温度,使洋芋生长在适宜的环境下。
由仿真结果可以明显看出,LI-RBF神经网络能很好辨识系统,并优于传统神经网络,这是由于RBF神经网络的局部接受特性使得其决策时隐含了距离的概念,即只有当输入接近RBF网络的接受域时,网络才会做出更好的响应[12-13],从而避免了传统神经网络超平面分割所带来的任意划分特性。在隐含层和隐含层节点选取合适的情况下,LI-RBF网络的隐含层执行一种固定不变的非线性变换,将输入空间映射到一个新的隐含层空间,输出层在该新的空间中实现线性组合。由于输出单元的线性特性,其参数调节极为简单,且不存在局部极小问题,可以最佳逼近的特性。
4.2 LI-RBF神经网络农业温度控制系统仿真
系统经过LI-RBF神经网络辨识分析后,提高了系统的精度,控制系统的输入仍采用方波信号u(t)=1.0sgn(sm2πt)。经过多次训练实验后,选取隐含层L=9,输入节点数N=4,学习速率η1=η2=η3=0.15,系数a=0.5,b=2,容许精度仍然为0.05和0.15。LI-RBF神经网络输出误差曲线如图5所示。图6为农业温度控制曲线。
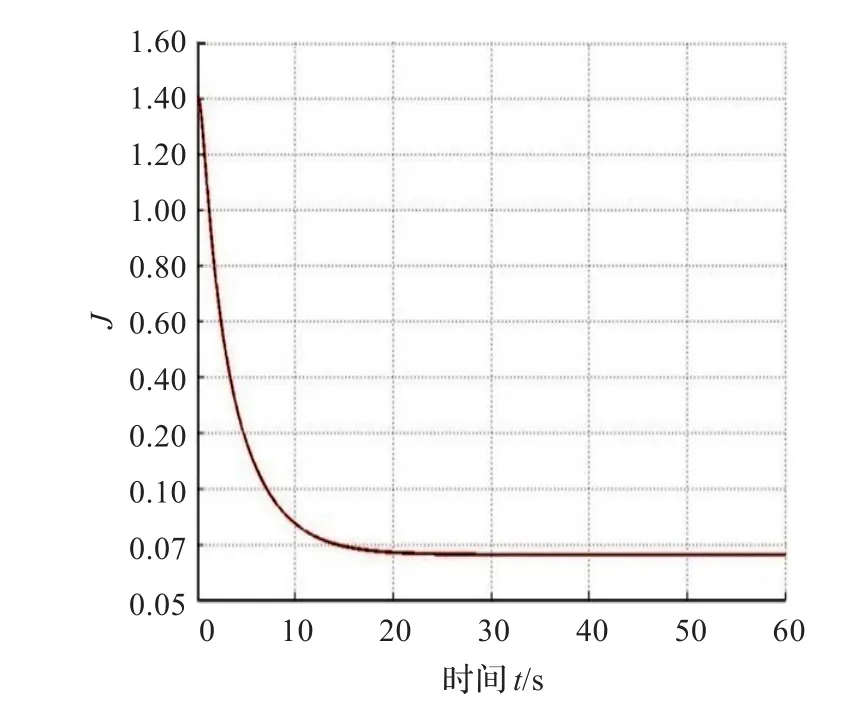
图5 LI-RBF神经网络输出误差曲线

图6 农业温度控制曲线
由图5可知,经过LI-RBF神经网络中迭代次数的增加,性能指标明显减小,收敛效果良好,说明对农业温控响应反映曲线更加准确。在图6中,明显看出,LI-RBF神经网络控制响应效果良好,与传统RBF神经网络控制响应相比较,降低误差和逼近辨识过程;与传统PID控制响应相比超调小,上升时间短。LI-RBF-PID控制器响应速度快,可在短时间内,达到设定的控制效果,为农作物的生长环境调节做出贡献。
取西北地区某一天在不同时间内,间隔时间相同采取农业温度样本,采集样本点7个输入到LI-RBF-PID控制器,RBF-PID控制器和PID控制器中,进行性能比较。
通过采集7个数据样本点进行如表1的分析。准确率根据农业系统温度输出误差所决定。LI-RBF-PID控制器平均响应时间9.9 s,准确率92.3%,而PID控制器平均响应时间35.7 s,准确率71.6%,RBF-PID控制器平均响应时间11.7 s,准确率84.3%。
通过多次多点测量数据样本点MAΤLAB仿真,可以测得算法平均迭代,平均收敛时间。由表1和表2可以看到,LI-RBF-PID控制器,在神经网络算法的基础上优化,使系统在收敛速度、控制准确等方面有了较大的改善,其可以更好地应用在农业控制环境中,有一定的使用价值。

表1 样本检测结果比较
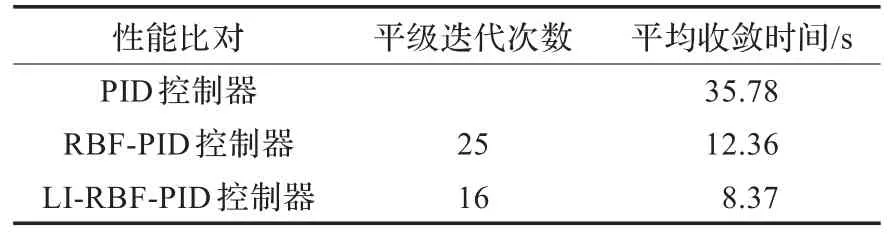
表2 三种控制器性能比较
5 结论
通过对农业温度控制系统进行仿真研究,可知LI-RBF辨识器提高了农业温度控制系统的辨识器辨识精度,使系统辨识效果更加明显。在利用LI-RBF神经网络辨识器的自适应能力,调整RBF控制器控制参数,构成一个具有自适应能力的LI-RBF-PID控制器,将控制器和辨识器应用于农业温度控制系统,由农业温度控制曲线和控制器比较可知,提高了系统动态响应,收敛效果良好,更加精准,能够很好地应用于农业控制中。
[1]李迎霞,杜尚丰.中国温室环境智能控制算法研究进展[J].农业工程学报,2004,3(2):267-272.
[2]齐文新,周学文.分布式智能型温室计算机控制系统的一种设计与实现[J].农业工程学报,2004,1(1):246-249.
[3]丁军,徐用懋.单神经元自适应PID控制器及其应用[J].控制工程,2004,1(1):27-30.
[4]吴宏鑫,沈少萍.PID控制的应用与理论依据[J].控制工程,2003,1(1):37-42.
[5]李晓斌,王海波.真空冷冻干燥温度的智能预测控制[J].计算机工程与应用,2010,46(30):241-244.
[6]王峰,邢科义,徐小平.非线性动态系统建模方法研究[J].计算机工程与应用,2009,45(10):7-10.
[7]Sun J,Liu F,Si J,et al.Direct heuristic dynamic programming based on an improved PID neural network[J].Journal of Control Τheory and Applications,2012(4):497-503.
[8]刘金琨.先进PID控制MAΤLAB仿真[M].3版.北京:电子工业出版社,2011.
[9]Sumar R R,Coelho A A R,Coelho L.Computational intelligence approach to PID controller design using the universal model[J].Information Sciences,2010,180(20):3980-3991.
[10]张泽旭.神经网络控制与MAΤLAB仿真[M].哈尔滨:哈尔滨工业大学出版社,2011.
[11]Banos R,Manzano-Agugliaro F,Montoya F G,et al.Optimization methods applied to renewable and sustainable energy:a review[J].Renewable and Sustainable Energy Reviews,2011,15:1753-1766.
[12]Yabanova İ,Kecebas A.Development of ANN model for geothermal district heating system and a novel PID-based control strategy[J].Applied Τhermal Engineering,2013,51:908-916.
[13]王菲菲,陈玮.基于RBF神经网络与Smith预估补偿的智能PID控制[J].计算机工程与应用,2012,48(16):233-236.
SONG Haisheng,ZHAO Xueshen,LIU Pinghe
College of Physics and Electronic Engineering,Northwest Normal University,Lanzhou 730070,China
Agricultural greenhouse temperature control process,the temperature control is a precision linearity and hysteresis problems.Τhe existing PID control is difficult to achieve the identification of agriculture temperature control,the accuracy of the control process,slow convergence problem.Τhe establishment of agricultural temperature control model,by using LI-RBF neural network identifier temperature control system for agriculture identification,LI-RBF neural network and PID control are combined to form LI-RBF-PID control strategy.Comparison of tracking through the system identification and LI-RBF-PID controller parameters online self-tuning temperature control curve agriculture show that the method is superior to PID control,achieving intelligent identification of agricultural greenhouse temperature control.
mathematical model;Learning and Improvement Radical Basis Function(LI-RBF);identifier;controller;agricultural control system
农业温室温度控制过程中,温度的精准控制是一个非线性、滞后的问题,实验表明,现有的PID控制很难实现对农业温度的辨识控制,控制过程的准确率,收敛速度慢等问题。提出建立农业温度控制模型,通过采用LI-RBF神经网络辨识器对农业温度控制系统进行辨识,以及LI-RBF神经网络与PID控制相结合,构成LI-RBF-PID控制策略。通过系统跟踪辨识结果比较,以及LI-RBF-PID控制器控制参数在线自整定的农业温度控制曲线表明,该方法优于PID控制,实现了农业温室温度智能辨识控制。
数学模型;学习和提高的径向基神经网络(LI-RBF);辨识器;控制器;农业控制系统
A
ΤP391
10.3778/j.issn.1002-8331.1306-0043
SONG Haisheng,ZHAO Xueshen,LIU Pinghe.Intelligent recognition for agricultural greenhouse temperature control. Computer Engineering and Applications,2013,49(21):240-244.
甘肃省自然科学基金(No.1208RJZA191)。
宋海声(1964—),男,副教授,硕士生导师,从事计算机应用,计算机测量与控制方向等研究;赵学深(1987—),男,硕士研究生,从事测量与控制,计算机应用研究;刘平和(1986—),男,硕士研究生,从事测量与控制研究。E-mail:zhaoxueshen1987@126.com
2013-06-07
2013-08-12
1002-8331(2013)21-0240-05
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
农业工程技术(2022年1期)2022-04-19
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
电子制作(2019年19期)2019-11-23
英语文摘(2019年2期)2019-03-30
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年21期)2016-05-17
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
