采用有向梯度与RANSAC的虹膜定位算法
2013-07-20 02:34贺遵亮蔡碧野李峰章登勇
计算机工程与应用 2013年24期
贺遵亮,蔡碧野,李峰,章登勇
长沙理工大学计算机与通信工程学院,长沙 410004
采用有向梯度与RANSAC的虹膜定位算法
贺遵亮,蔡碧野,李峰,章登勇
长沙理工大学计算机与通信工程学院,长沙 410004
1 引言
虹膜识别算法的关键之一是从采集的虹膜图像中准确定位虹膜区域。这主要包括瞳孔与虹膜、虹膜与巩膜的边缘定位,以下简称内缘、外缘。虹膜定位算法需要满足以下要求:(1)正确率高,算法应有尽可能高的正确率;(2)鲁棒性强,算法对眼皮、睫毛、光源照射所产生的光斑等噪声具有较强的抵抗能力;(3)定位速度快,算法应能够满足实时虹膜识别系统的要求。
目前,研究者们已经提出了很多虹膜定位算法,Daugman[1-3]利用虹膜内外边缘近似圆形的特性,提出了圆差分算子提取虹膜边缘,Wildes[4]采用边缘检测与Hough变换相结合的两步法来定位虹膜区域,这两种虹膜定位方法正确率高,但都在三维空间搜索,定位速度慢,无法满足实时系统的要求。T.Maenpaa[5]考虑到瞳孔、虹膜及其他区域构成三个灰度级的特性,提出了阈值二值化图像并求其质心的方法,该方法定位速度快但准确率低。Weiqi Yuan[6]利用传统的灰度投影法粗略定位瞳孔中心和位置,然后使用Hough变换法精确定位,当虹膜图像中包含浓厚睫毛时,灰度投影法很容易把睫毛位置误定位为瞳孔位置,从而使该方法正确率较低。I.A.Matveev[7]提出的局部亮度梯度投影法定位速度快、准确率高,但其要求虹膜区域必须在整个图像框架之内。Li[8]提出的基于窗映射的虹膜定位算法准确率和定位速度都较好,但若虹膜图像包含较多的光斑,该方法的准确率迅速下降。
针对以上方法都不能同时达到正确率高、定位速度快和鲁棒性强(特别是对光斑的抵抗力)的要求,本文提出了一种基于有向梯度和随机抽样一致性的虹膜定位算法。在给定瞳孔内部某个点的基础上,该算法利用有向梯度和RANSAC定位虹膜内缘,解决了光斑对定位带来的干扰问题。通过下采样,在瞳孔左右侧分别拟合两个圆,进而合并成一个圆,提高了外缘定位速度和正确率。
2 内缘定位
2.1 有向梯度提取内缘候选点
虹膜内外边缘近似圆形,因此内外边缘定位的实质是复杂环境下圆的检测。理想情况下,若圆内灰度较低,圆外灰度较高,则圆周上的点具有如下特点:点的梯度方向与从原点到该点的向量方向相同,如图1所示。利用此特性,在给定圆内一点的情况下,可快速检测出圆周上的点。
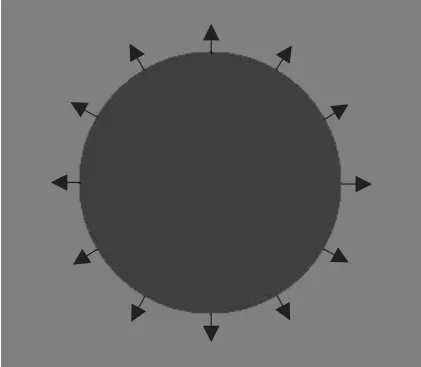
图1 理想圆边缘的梯度特性
假设已经获取瞳孔内部某个点[9],记为(x0,y0),f表示原始虹膜图像,g(x,y)表示图像亮度梯度,Pf(i)表示图像f灰度概率直方图的累计分布。图像中每个像素点都有一个梯度值和一个方向值,只有满足一定条件的点才是虹膜边缘点,这些点可以用如下公式得出:

式(1)中,||·||表示求向量的模,(x,y)表示图像中的点,T1、T2为阈值参数。图像中像素梯度幅值大于T1的点才被认为是边缘点,T1的值由式(2)中的α决定,式(2)表示取Pf(i)中大于α的最小的i值,(1-α)的直观意义是选取的内缘边缘点占整个图像像素尺寸的大概比例。T2被设计成该点的梯度方向与向量(x-x0,y-y0)方向的相似程度,只有方向相似的点(比如两个向量的夹角小于π/6)才能作为内缘候选点,这样可以减少候选点的数量。于是,在图像f2中值为1的点即为内缘候选点。
2.2 RANSAC拟合内缘
得到的点集图像f2如图2所示,白色的像素点就表示内缘候选点,这既包含实际的内缘边缘点还包含噪声点,需要从这些包含噪声点的点集中拟合出最佳圆作为虹膜的内边缘,这正符合RANSAC技术的要求。
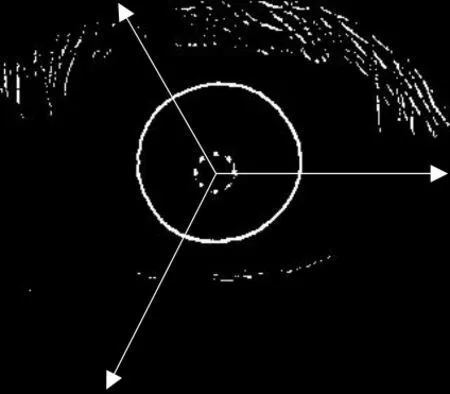
图2 内缘候选点集划分图
RANSAC可以从一组包含噪声点的数据集中,使用迭代方法估计已知数学模型的参数,然后用全体数据集对估计的模型进行验证,这里的数据集就是内缘候选点集。为增加算法的鲁棒性,将候选点集分成三个子集,如图2所示,以(x0,y0)为中心,作3条互成120°夹角的向量,以这3条向量为分界线,将候选点集划分成3个子集。
此时RANSAC方法可描述成:从3个点集中各随机取一点,计算3点确定的圆参数;统计圆周上候选点占整个圆周的比例;若比例大于某个阈值T3或迭代次数超过某个阈值IterNum,则算法终止。假设确定的圆参数为(xc,yc,rc),参数β表示圆周上候选点占整个圆周的比例,该参数用来评价由参数(xc,yc,rc)确定的圆与整个候选点集的拟合程度,计算式如式(3),积分曲线为整个圆周。

当β超过阈值T3时,就认为找到了内缘的最佳拟合圆,迭代直接终止;否则继续迭代,直到迭代次数超过IterNum,终止算法,选取拟合程度最佳(β取值最大)的圆为虹膜内缘参数。
3 外缘定位
虹膜外缘与理想圆的吻合程度相对较低,直接用圆拟合,准确率和错误率都将较高。为增强算法的鲁棒性,采用圆差分算子在瞳孔左右两侧分别拟合出一个圆,然后将两圆合并成为外缘边缘,同时采用下采样方法提高定位速度。
圆差分算子如式(4)所示,f(x,y)表示原始虹膜图像,Gσ(r0)表示高斯模糊函数,σ表示其标准差。

假设检测的左侧圆参数为(x2,y2,r2),右侧圆参数为(x3,y3,r3),最终外缘参数(x4,y4,r4)的计算如式(5)~(8)所示。考虑到在垂直方向,两侧圆位置的偏离程度不会太大,因此使用公式(5)求平均值得到最终参数。水平方向左右两侧圆位置及半径可能相差较大,因此使用式(6)~(8)来确定最终外缘参数。

为提高外缘定位速度,可先下采样原虹膜图像将其缩小到原来的1/4大小,然后应用提出的方法在缩小的图像中初略定位外缘,再在原图像中的一个极小空间内调整参数。这样,搜索空间就变成S2,如式(10)所示,式中右边的第一项表示在1/4图像中的搜索空间大小,第二项表示在原图像中进一步调整参数的空间大小,这里横纵坐标及半径只取3个像素的范围。

由式(9)和式(10)可看出7S2<S1<8S2,因此采用下采样方法将搜索空间缩小了7~8倍,从而提高了外缘定位速度。
4 实验
算法采用CASIA-IrisV3-Interval虹膜图像库[10]、C++语言编写进行验证,该库中有249人,每人左右眼各0~10幅不等的虹膜图像,总共2 600幅图像。该库的虹膜采集摄像机中设置了8个圆环形的红外辅助灯,这使得拍摄的虹膜图像在瞳孔内部有8个圆形的光斑。
4.1 实验评价方法
虹膜内外边缘有时模糊且并非理想的圆形,因此定位的参数会存在一定的弹性,这样就无法客观地判断其定位结果的正确性。为此,先采用人工干预的方式标定每幅虹膜图像,确保得到的定位效果与实际虹膜内外缘足够吻合,以致人眼专家也不可否认其正确性,标定的参数将作为“真实的参数”来判断提出算法的准确性。
将实验获得的参数与真实的参数比较,圆的3个参数中,所有参数的偏差都小于5%,就认为是精确定位,存在某个参数偏差超过10%,就认为是严重错误,其他情况则认为是轻微错误。由于内缘定位可以经过进一步修正来完善而外缘本身边缘模糊,所以将精确定位和轻微错误的情况认为是正确定位,严重错误的情况认为是错误定位。
4.2 实验参数设定
利用有向梯度进行内缘边缘检测时,为确保瞳孔所有边缘点能被保留,取T1=0.96。事先确定的瞳孔内部某点可能会偏离内缘中心,使用梯度方向性质进一步约束候选点,参数T2=cos(π/6)。
RANSAC的实质是一个随机迭代算法,迭代次数越多,正确率越高,时间消耗也就越长。为达到定位速度和正确率的最佳平衡,必须设置适当的最大迭代次数IterNum。将最大迭代次数的范围设置成5≤IterNum≤40,每增加5次迭代,测试并记录错误率,这样得到错误率与IterNum的关系如图3所示。从图3中可以看出,IterNum≤25时,错误率随着IterNum的增加而迅速下降,在25次之后,错误率趋于稳定,因此IterNum的最佳值为25。只要圆周上有超过35%的点为候选边缘点,即可确定已经找到了虹膜内缘,因此T3取0.35。
4.3 实验结果比较
将本文算法和圆差分算法[2-3]分别对虹膜图像库进行测试,实验结果如表1和表2所示。

图3错误率-最大迭代次数关系图
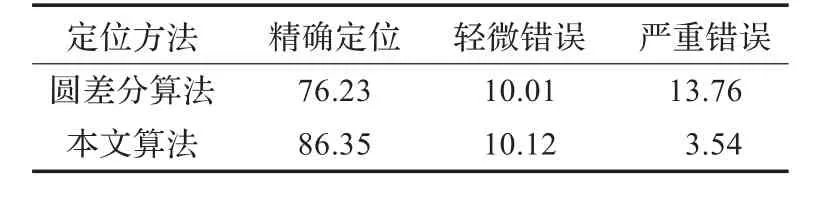
表1 内缘定位实验结果比较(%)

表2 外缘定位实验结果比较(%)
从表1和表2中可以看出,本文算法的内外缘定位准确率均明显高于圆差分操作算法。本文算法定位内缘的正确率高达96.47%,定位外缘的正确率高达97.52%,最终正确率取96.47%。另外还对每幅图像的处理时间进行了统计,本文算法的平均处理时间为0.01 s,而圆差分算法的平均处理时间为0.215 s。圆差分算法容易将光斑组成的圆环误定位成内缘,本文算法能很好地抵制这种影响,因此本文算法在正确率、定位速度及鲁棒性方面均优于圆差分算法。
图4是本文算法得到的一些虹膜定位结果,典型虹膜图像的定位效果如图4(a)所示,而如图4(b)中虹膜区域超出了图像框架,图4(c)中睫毛浓厚,图4(d)中部分光斑已在瞳孔之外,图4(e)中眼皮遮挡严重的情况,本文算法都能很好地定位虹膜区域。

图4 部分虹膜图像定位效果
5 结论
本文针对光斑较多的虹膜图像,提出了基于有向梯度与RANSAC相结合的虹膜定位算法,解决了瞳孔灰度与梯度性质发生重大改变时的虹膜定位问题。实验结果表明,与传统虹膜定位算法相比,本文算法能够更好地定位多光斑虹膜图像中的虹膜区域。本文算法准确率96.47%,平均定位时间0.01 s,可满足实时虹膜识别系统的应用需求。
[1]Daugman J.New methods in Iris recognition[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2007,37(5):1167-1175.
[2]Daugman J.How iris recognition work[J].IEEE Transactions on Circuits and Systems for Video Technology,2004,14(1):21-30.
[3]Daugman J.The importance of being random:statistical principles of Iris recognition[J].Pattern Recognition,2003,36(2).
[4]Wildes R P.Iris recognition an emerging biometric technology[J].Proceedings of the IEEE,1997,85(9):1348-1363.
[5]Maenpaa T.An iterative algorithm for fast Iris detection[C]// IWBRS,2005:127-134.
[6]Yuan Weiqi,Lin Zhonghua,Xu Lu.A rapid iris location method based on the structure of human eyes[C]//27th Annual International Conference,2006:17-18.
[7]Matveev I A.Detection of Iris in images using brightness gradient projections[J].Pattern Recognition and Image Analysis,2011(1):41-44.
[8]Li Yu,Zhou Xue.Fast Iris boundary location based on window mapping method[C]//2011 Seventh International Conference on Computational Intelligence and Security(CIS),2012:1127-1130.
[9]Matveev I A.Method of detection of circle with known internal point[J].Trans on Inst Syst Anal Russ Acad Sci Dynam Heterogeneous Syst,2007,31(1):288-293.
[10]Institute of Chinese Academy of Sciences.CASIA iris image database:version 3.0[EB/OL].(2007-12-21).http://biometrics. idealtest.org/index.jsp.
HE Zunliang,CAI Biye,LI Feng,ZHANG Dengyong
College of Computer&Communication Engineering,Changsha University of Science&Technology,Changsha 410004,China
For the condition of spots on iris image,this paper proposes an iris location algorithm based on orientation gradient and Random Sample Consensus(RANSAC).It extracts inner edge points of iris by orientation gradient according to some points in the pupil,and then locates the inner edge with RANSAC.The iris image is down-sampled.Two circles are fitted by circle differential operator on the left and right side of the pupil,and then the two circles are combined to one circle.It locates the outer edge of iris by using the parameters of the circle fast and precisely.The experimental results show that the proposed algorithm is better than traditional localization algorithms in the aspect of correct rate,speed and robustness.
iris recognition;iris location;orientation gradient;Random Sample Consensus(RANSAC)
针对虹膜图像中有较多光斑的情况,提出一种基于有向梯度和随机抽样一致性(RANSAC)相结合的虹膜定位算法。该算法根据瞳孔内某点利用有向梯度提取内缘像素点,采用RANSAC定位虹膜内缘;下采样虹膜图像,利用圆差分算子在瞳孔左右两侧拟合出两个圆,进而合并为一个圆;根据圆的参数在虹膜图像中快速精确定位外缘。实验结果表明:该算法在正确率、定位速度和鲁棒性方面均优于传统的虹膜定位算法。
虹膜识别;虹膜定位;有向梯度;随机抽样一致性
A
TP391.4
10.3778/j.issn.1002-8331.1203-0698
HE Zunliang,CAI Biye,LI Feng,et al.Iris location algorithm using orientation gradient and Random Sample Consensus. Computer Engineering and Applications,2013,49(24):172-174.
国家自然科学基金(No.60973113);湖南省自然科学基金(No.09JJ3120);湖南省教育厅项目(No.08C103,No.11C0036);长沙市科技计划重点项目(No.K1104022-11)。
贺遵亮(1987—),男,硕士研究生,主要研究方向:图像处理、模式识别;蔡碧野(1962—),男,副教授,主要研究方向:图像处理、模式识别、网络与信息安全;李峰(1964—),男,博士,教授,主要研究方向:图像处理、模式识别、信息安全;章登勇(1980—),男,博士研究生,主要研究方向:图像处理、模式识别、信息安全。E-mail:Zunliang.He@gmail.com
2012-03-29
2012-06-29
1002-8331(2013)24-0172-03
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
上海师范大学学报·自然科学版(2019年4期)2019-11-01
红楼梦学刊(2019年2期)2019-04-12
青年歌声(2018年2期)2018-10-20
文萃报·周二版(2018年51期)2018-08-04
课程教育研究·学法教法研究(2018年36期)2018-01-29
阅读与作文(初中版)(2017年6期)2017-07-05
学苑教育(2015年16期)2015-08-15
电视技术(2014年19期)2014-03-11
城市建设理论研究(2012年13期)2012-06-04