高阶马尔可夫随机场下目标识别模型的建立
2013-07-19 08:44王彩凤马超廖福成
计算机工程与应用 2013年19期
王彩凤,马超,廖福成
1.北京科技大学,北京 100083
2.首都经贸大学,北京 100070
高阶马尔可夫随机场下目标识别模型的建立
王彩凤1,马超2,廖福成1
1.北京科技大学,北京 100083
2.首都经贸大学,北京 100070
1 引言
人类对目标的识别早在很久以前就开始了,早期的目标识别仅能单纯地依靠人的视觉系统,虽然灵敏但只是人的生存本能,不能称之为技术,更没有技术上的应用。20世纪计算机的出现给很多科学研究带来了重大变革,20世纪60年代以来,数字图像处理得到了长足的发展,目标识别也吸引了国内外众多研究者的目光。
文献[1]证明了Gibbs分布与马尔可夫随机场的等价。基于Gibbs分布和马尔可夫随机场(Markov Random Field,MRF)的一致性,建立了关于重建图像及其边缘的联合先验分布模型。文献[2]构建了基于矩形和线段的标值点过程,将传统的基于像素点的贝叶斯分析扩展到矩形和线段上,通过矩形来标记相似区域,通过线段来进行边界的分割。
本文基于贝叶斯分析中的最大后验概率估计原则,综合运用了标值点过程,利用协方差矩阵描述子来构造能量函数,应用马氏链蒙特卡罗(Markov Chain Monte Carlo,MCMC)方法建立算法,从而得到全局最优解。本文方法还可进一步应用于其他生活领域,比如道路、河流以及城镇区域的识别。
2 研究方法
基于贝叶斯分析的目标识别方法主要包括模型的建立,求取最大后验估计以及对目标所在区域范围的确立三部分。下面对以上三部分进行详细的阐述。
2.1 贝叶斯模型的建立
在一幅观测到的图像中,由于往往会受到各种因素的影响,使得除了目标以外还有其他的干扰,对于目标识别而言,其目的是要在此图像中找出感兴趣的区域。为此,可以构建一个数学模型来对此图像中的目标进行识别。
从随机的角度看,一幅图像中像素点灰度值的取值是一个随机变量,在一幅二维图中可以定义其相应的邻域系统,进而产生了二维马尔可夫随机场的概念。邻域的概念使得每一个像素点都与其他像素点联系起来,这样就反映了图像的局部特征,从而可以反映出图像的特性。
关于如何描述一幅图像的分布特征,文献[1]提出了Gibbs随机场的概念,证明了Gibbs随机场与马尔可夫随机场的等价。马尔可夫随机场刻画了图像邻域的统计性质特征,而Gibbs分布则使用联合概率刻画其全局性。
针对此统计决策问题,可以使用贝叶斯分析的方法进行处理。从之前的讨论已经得知,贝叶斯分析区别于传统的统计决策方法在于引进了先验信息,在图像处理中,往往会得到一部分图像信息,恰当地描述这些信息,是将贝叶斯分析引入图像处理的关键。在下文中,会详细探讨这方面的工作。
目标识别中,待确定的目标图像及其区域特征是已知的。假设观测到的图像为Y,事先已知的目标图像为I,在这里,因图像Y和I都是已知信息,可以统一用K来表示,即K=(Y,I)。另外,假设待确定的目标图像I在已观测图像Y中的所占区域为X。
通过贝叶斯分析思想,可将最优区域的识别问题转化为求最大后验概率估计问题[3-5]。贝叶斯分析综合了主观信息作为先验信息进行决策,在目标识别中,由贝叶斯公式(1)可得X的最优配置xˆ,即为令p(X|K)最大的配置。
U(X)是先验能量函数,用来表达X的特征,U(X,K)是似然能量,用来描述K和X之间的距离。
由最大后验估计可知,使得p(X|K)最大的最优配置xˆ即为所要找到的目标区域。
2.2 构建先验模型和后验模型
直接求贝叶斯估计具有指数复杂性,因为要计算所有可能状态的后验概率,计算量非常大,需要使用其他方法进行模拟求解。
运用标值点过程的思想[2],可将图像中的区域看做是由若干矩形、线段或者圆形组成的,目前两种比较常用的方法,即基于矩形和基于线段的方法[2,5-6]。这两种方法的共同点是以区域之间的位置关系来描述先验信息,从而构建先验模型,这种方法对于如何构造能量函数给予了一定的启示,于是可以认为问题的关键在于如何定义区域之间的关系。
利用协方差矩阵描述子[7],可以直接得出一个区域的纹理特征,也可以得出两个区域间纹理特征的差异程度[7]。这样,一方面避免了对区域间位置关系定义的繁琐,另一方面直接测度了某一邻域所具有的能量,使结果更加直观。
本文中,假设观测到的图像一般是矩形,考虑到矩形区域对图像覆盖的完整性以及区域之间的联系的表达意义,对目标识别而言,矩形相较线段和圆形是一个较好的选择,因此,采用矩形作为图像的基本处理单元。
可以根据图像的局部特性来对X的特征进行描述,将此区域与其周围区域的关系考虑其中,类比马尔可夫随机场中邻域系统的概念[5],给出区域邻域系统的定义如下。
定义1(区域邻域系统)
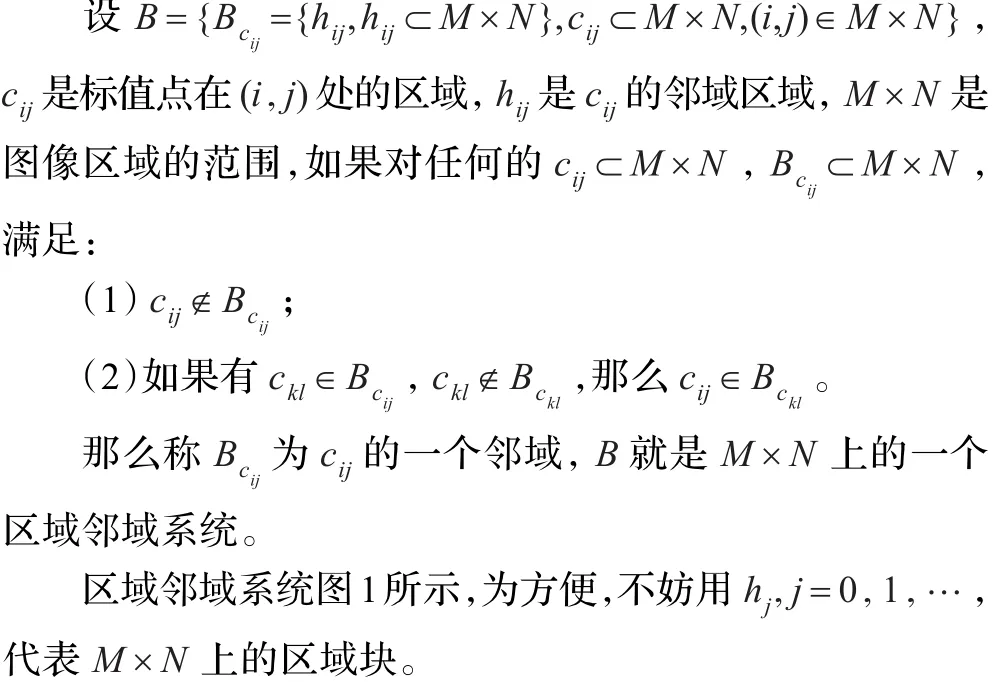
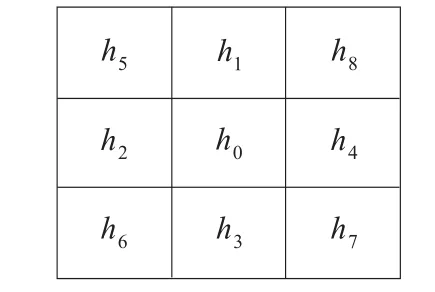
图1 区域邻域系统
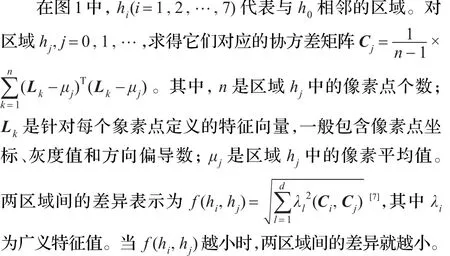
先验项的构造是从图像Y中的区域X所具有的局部能量特性得出的,给出了区域邻域系统下目标区域的能量定义,公式(3)中的hi表示区域X在水平和垂直方向上的邻域,hk表示区域X在斜对角线上的邻域。似然函数的构造基于图像Y中候选目标区域X和代表着已知目标区域特性的图像I二者之间的差异。
先验项:

似然项:

公式(3)的先验项中,ν为目标区域水平和垂直方向上相邻区域的个数,d为目标区域斜对角线相邻区域的个数。
在目标区域的识别中要考虑角度的旋转问题,一般的做法是令图像中的X进行旋转,然而由于X进行旋转后,区域邻域系统的描述会变得比较复杂,如今仅需从已知的目标区域信息入手,将I进行旋转。得到几个方向上目标的不同信息,用I0,I1,…,Inθ来表示,标值点((x,y),θ,L,l)中的θ即为使得U(X,K)最小的Ii的旋转角θi,nθ为I旋转得到的图像个数。进一步得到似然项的一般形式:

若X周围有8个区域与之相邻,简称为8邻域系统,如图1所示。则X的后验能量函数构造为公式(6):

对于图像Y而言,并不是每个区域都具有这样的8邻域系统,因为在一幅图像中区域标值点所在的位置不同,其邻域系统也会发生改变,不同的邻域系统的能量函数具有不同的形式,现将对图像Y的区域划分表示为图2。

图2 图像的区域划分
与8邻域类似地,可以对不同区域的能量函数进行构造。通过对整个图像每个矩形区域能量函数的定义,最终可以得出每一个区域的能量。
2.3 采用Metropolis抽样算法求取模型极大后验估计
这里的目的就是要找出能量最小的区域,即求解公式(7):

由于后验能量函数的复杂性,要直接求解公式(7)是很困难的,采用马氏链蒙特卡罗(MCMC)方法,将其转化为Gibbs分布[1],即求得使得后验概率最大的区域,可表示为:

在这里,只需固定温度参数,对MCMC算法中的Metropolis抽样[8-11]进行简化,算法设计如下:
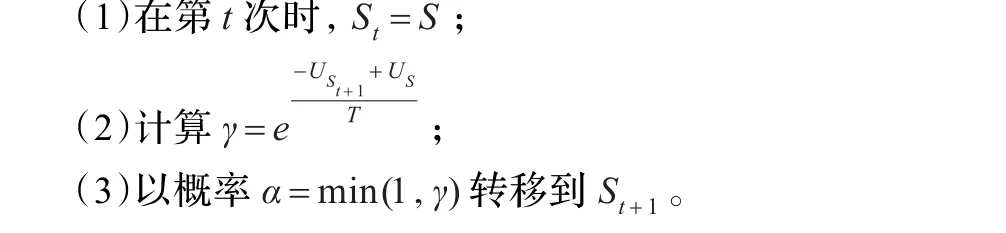
经过图像的一次遍历,最终得到一个最优区域,使得后验概率达到最大。
2.4 确定目标所在区域范围
在获得最优区域后,也就获得了表征该矩形区域的坐标位置(x,y)以及旋转角度θ,值得注意的是,目前得到的只是实际目标区域的核心位置,并非代表目标区域的实际范围。
为了得到尽可能准确的目标区域的实际范围,从已经得到的目标区域出发,随机生成Nr个矩形区域,定义区域集合为V={ν1,ν2,…,νNr},使得已得到的初始标值点包含在这些矩形区域中。在此处,可以认为在一定条件限制下得到的区域面积越大越好,设置一个阈值Tr,定义一个集合:

集合Vr中的元素在一定意义上均为合理的区域。然而,一方面f(νi,Ij)的值越小代表着目标区域与已知的目标图像I相似度最高;另一方面,在实际情况中,相对于目标图像I,区域往往比目标图像I大。故而认为最合理的区域是公式(10)所定义的区域:

其中,Sνi为νi区域面积,Sνi=Li×li,Li为νi区域的列宽,li为νi区域的行高。
综上所述,最终获得的最优目标区域Xˆ可用特征向量=((x,y),θ,L,l)表征,在这里,取最优目标区域Xˆ的中心像素点的坐标位置为(x,y),θ为使得公式(5)中U(X,K)最小的Ii的旋转角θi,L和l分别为最优目标区域Xˆ的列宽和行高。
3 Matlab仿真实例
通过上述目标识别模型的建立,应用Matlab7.6.0(R2008a)仿真编程,将其应用于实际道路中斑马线的识别[12-16]。目前,基于图像的斑马线识别通常利用图像灰度分布的双极特征,结合边缘提取,采用傅里叶变换、Radon变换或Hough变换,根据斑马线图像具有的特殊特征抽取出斑马线区域。根据文献[12-16]所述,当图像质量良好时,识别效果好,但当图像质量不好,尤其因为光线亮度不够使得斑马线灰白对比不够明显时,就难以识别出来了。由于本文在所定义的区域邻域系统和后验模型下,采用刻画纹理特征的协方差矩阵描述子,该描述子对旋转、尺度缩放和亮度都具有适应性,使得上述缺陷得以克服。图7(d)和图7(e)的识别结果说明了它的有效性。
图3给出的是待识别的目标图像,为方便快速地得到方向信息,可将待识别图像进行不同角度变换,如图3所示。

图34 个角度斑马线目标待识别图像
图4为一个道路环境较为理想情形下的实际观测图像,记为实例1;图5为实例1的识别结果,图中黑线圈出部分为公式(9)求得的合理区域νoptimum;图6(a)和(b)给出了仿真实例2,也是理想情形下的,但角度有所不同。
下面给出具体结果说明。
如图4所示,目的是在实际道路观测图像Y中识别出I0、I1、I2、I3合成的区域X来代表斑马线区域。

图4 实际道路中观测图像Y(斑马线识别实例1)

图5 实例1中最优目标识别区域(以黑线边框标记出)
从标记的结果可以看出,其结果是基本符合情况的。
图6是仿真实例2,相应得出的最优目标区域表征向量取值分别为
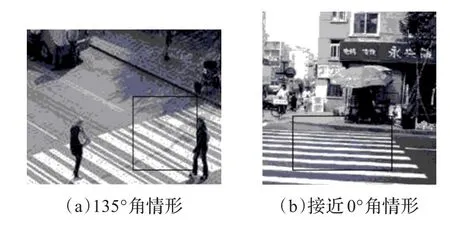
图6 实际道路中斑马线的识别实例2
图7(a)~(h)给出了一些环境较为复杂情形下实际道路中斑马线的识别结果,除了图7(b)和(h)圈出区域范围过大外,其他识别结果基本是符号实际情况的。
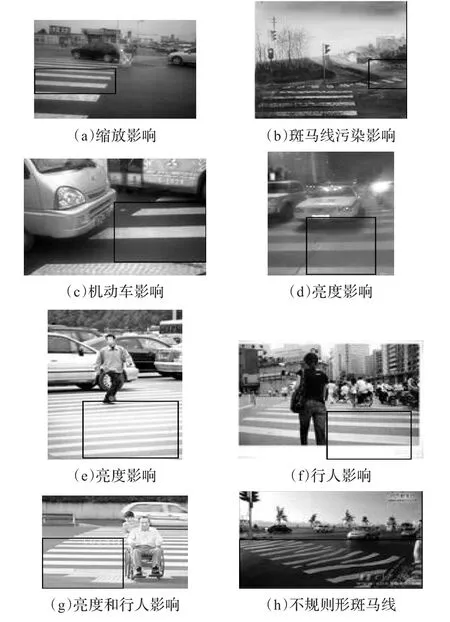
图7 实际道路中复杂情形下斑马线的识别实例
本文仿真实例对于盲人导航系统的研究,以及无人驾驶车的应用研究均有实际应用意义。
4 结论
本文给出了区域邻域系统的定义,以及区域邻域系统下基于协方差矩阵描述子进行目标识别的贝叶斯分析模型的构造,并将所构建模型应用于实际道路的斑马线识别上。实验结果表明,该模型对于已观测类图像中既定目标的识别和定位具有实际应用价值。
当已观测图像中的目标图像周围环境复杂时,会影响获得目标区域的准确性,并且在提高算法效率方面,都有待进一步的研究。
[1]Geman S,Geman D.Stochastic relaxation,Gibbs distribution,and the Bayesian restoration of images[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1984,6:721-741.
[2]Ortner M,Descombes X,Zerubia J.A marked point process of rectangles and segments for automatic analysis of digital elevationmodels[J].IEEE TransactionsonPattern Analysis and Machine Intelligence(TPAMI),2008,30(1):105-119.
[3]Berger J O.Statistical decision theory and Bayesian analysis[M]. 2nd ed.Berlin:Springer-Verlag,1985.
[4]茆诗松,王静龙,濮晓龙.高等数理统计[M].北京:高等教育出版社,1998.
[5]Kotz S,吴喜之.现代贝叶斯统计学[M].北京:中国统计出版社,2000.
[6]张正,王宏琦,孙显,等.基于部件的自动目标检测方法研究[J].电子与信息学报,2010,32(5).
[7]Tuzel O,Meer P.Region covariance:a fast descriptor for detection and classification[C]//Proceedings of the 9th European Conference on Computer Vision,Graz,Austria,2006:589-600.
[8]Liu J.Monte Carlo strategies in scientific computing[M]//Berlin:Springer-Verlag,2005.
[9]刘琳琳,洪文.基于标值点过程的遥感影像道路网络提取[J].计算机仿真,2008,25(1):221-224.
[10]张道兵,刘琳琳,林殷,等.高分辨率遥感影像居民区道路网交互提取[J].光学技术,2008,34(1).
[11]张鹏.Markov随机场在图像处理中应用的研究[D].武汉:华中科技大学,2005-05.
[12]曹玉珍,刘刚,杨海峰.导盲系统中的道路斑马线识别方法[J].计算机工程与应用,2008,44(15):176-178.
[13]王耀明,严炜,俞时权.基于Radon变换的图像矩特征抽取及其在图像识别中的应用[J].计算机工程,2001,27(2).
[14]Uddin M S,Shioyama T.Detection of pedestrian crossing using bipolarity feature-an image-based technique[J].IEEE Transactions on Intelligent Transportation Systems,2005,6(4):439-445.
[15]Stephan S.Zebra-crossing detection for the partially sighted[C]// Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2000:211-217.
[16]Sichelschmidt S,Haselhoff A,Kummert A,et al.Pedestrian crossing detecting as a part of an urban pedestrian safety system[C]//Proceedings of 2010 IEEE Intelligent Vehicles Symposium,CA,USA,June 2010:21-24.
WANG Caifeng1,MA Chao2,LIAO Fucheng1
1.University of Science and Technology Beijing,Beijing 100083,China
2.Capital University of Economics and Business,Beijing 100070,China
Object recognition is to single out a special target from one or some observed images.This paper defines regional neighborhood system based on higher order Markov Random Field(MRF).By Bayesian analysis,a covariance matrix descriptor for regional images is used to model the priori and the likelihood.After modeling,a maximum posteriori estimation can be obtained by Metropolis algorithm.So the central point’s location and angle of the special target in the observed images can be determined.By generating many random rectangles along this central point,it can ultimately recognize the greatest coverage of the special target in the observed images.The Zebra Crossing Line is identified by programming in Matlab 7.6.0.Experimental results show that the special target can be identified from a large image observed.
high order Markov Random Field(MRF);object recognition;Bayesian analysis;marked point process;Markov chain Monte Carlo
目标识别是指一个特殊目标(或一种类型的目标)从其他目标(或其他类型的目标)中被区分出来的过程。给出了高阶马尔可夫随机场下的区域邻域系统定义;通过贝叶斯分析,构建了基于协方差矩阵描述子刻画的图像区域度量的先验模型和似然模型;应用随机算法得到极大后验估计,求得目标所在位置和角度;再通过以目标所在位置为中心,获得多个随机矩形;最终以覆盖范围最大者为所寻找的目标区域。通过Matlab仿真实验,对道路中的斑马线进行模拟识别。实验结果表明,可以达到在大区域中识别出既定目标的目的。
高阶马尔可夫随机场;目标识别;贝叶斯分析;标值点过程;马氏链蒙特卡罗方法
A
TP242.6+2
10.3778/j.issn.1002-8331.1112-0555
WANG Caifeng,MA Chao,LIAO Fucheng.Object recognition modeling based on high order Markov Random Field. Computer Engineering and Applications,2013,49(19):127-130.
国家自然科学基金(No.61174209)。
王彩凤(1975—),女,博士研究生,讲师,主要研究领域:模式识别,图像复原和概率统计;马超(1987—),男,硕士研究生;廖福成(1957—),男,博士,教授。E-mail:cfwang828@gmail.com
2012-01-04
2012-03-02
1002-8331(2013)19-0127-04
CNKI出版日期:2012-05-22http://www.cnki.net/kcms/detail/11.2127.TP.20120522.1108.007.html
猜你喜欢
品牌研究(2022年34期)2022-12-15
品牌研究(2022年36期)2022-01-01
作文周刊·小学二年级版(2020年24期)2020-07-14
工程数学学报(2020年3期)2020-07-06
学生天地(2020年29期)2020-06-09
长治学院学报(2019年2期)2019-07-24
雷达学报(2017年6期)2017-03-26
数学理论与应用(2016年3期)2016-05-17
核科学与工程(2015年3期)2015-09-26
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19