MIMO雷达目标数量估计
2013-07-11 09:36吴跃波杨景曙刘世春
计算机工程与应用 2013年5期
吴跃波,杨景曙,刘世春
解放军电子工程学院,合肥 230037
MIMO雷达目标数量估计
吴跃波,杨景曙,刘世春
解放军电子工程学院,合肥 230037
1 引言
现有的单(双)基地MIMO雷达定位方法都需要假设目标的数量已知,例如发射平滑技术[1]、最大似然法[2]、多项式求根法[3]、MUSIC-ESPRIT法[4-6]、投影矩阵法[7]和降维法[8]等。然而,实际情况中目标的数量通常是未知的,如果实际的目标数量和定位算法中使用的目标数量不相等,将会带来很大的定位误差以及虚警或漏警。因此,在使用现有的定位算法之前,必须首先正确获取目标的数量。本文的目的在于对目标的数量进行估计,从而为现有的各类目标定位方法提供前提保障。
对于MIMO雷达目标数量估计的研究尚未见有文献报道。在阵列信号处理中,信源数估计的主流方法有信息论准则、盖式圆准则、平滑秩序列法和正则相关技术等[9]。信息论准则基于白噪声推导而来,常见的有AIC准则和MDL准则,色噪声情况下其信源数估计效果较差。盖式圆准则基于盖式圆盘定理而来,白噪声和色噪声情况下均能适用。平滑秩序列法是处理相干源信号的,而对于MIMO雷达而言,由于各发射天线发射的信号相互正交,故无需使用平滑秩序列法。正则相关技术需要两个空间分离的接收阵列,故并不适用于单(双)基地MIMO雷达。因此,本文主要研究信息论准则和盖式圆准则在MIMO雷达目标数量估计中的应用。
2 信号模型
一般实际中,接收机的信号经过一系列距离-多普勒2维滤波器组,因此信号分析是在各个距离-多普勒2维分辨单元上逐个独立进行的[1]。对于脉冲雷达信号,由于多普勒频率可通过多脉冲回波提取,因而接收机可只需距离1维滤波器组,信号分析也只在各个距离1维分辨单元上逐个进行。这两种处理方式的不同,在参数估计上体现为先验信息的不同,前者在各个距离-多普勒2维分辨单元上进行信号检测,检测出有信号的同时就已获得了目标的时延和多普勒频率,而后者只获得了目标的时延。前者进行参数估计时可补偿信号的时延和多普勒频率,而后者只可补偿信号的时延。文献[1-3]的信号模型补偿了信号的时延和多普勒频率,文献[4-8]则只补偿了信号的时延。本文对这两种处理方式的目标数量估计方法都进行了研究。
如图1所示,MIMO雷达发射阵列和接收阵列均采用等距均匀线阵,共有M个发射阵元,N个接收阵元,发射阵元间距和接收阵元间距分别为dt,dr。目标的发射角和接收角分别记为φ和θ。对于单基地MIMO雷达,收发站的位置一致,因此有φ=-θ。
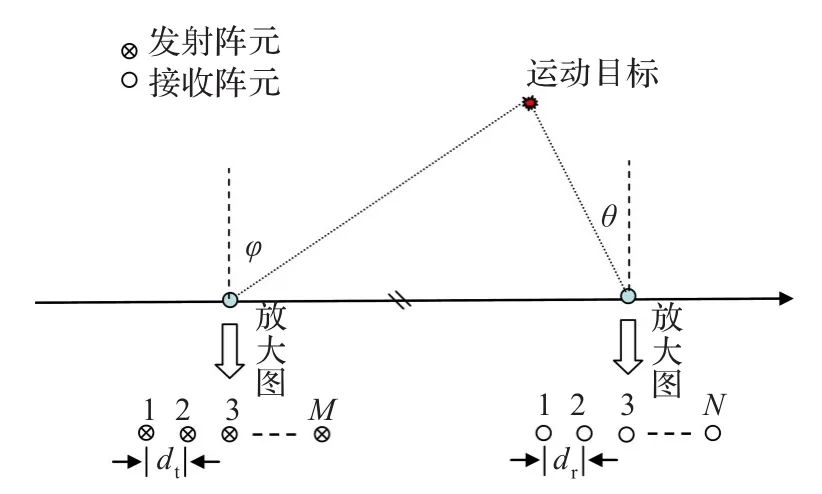
图1 MIMO示意图
2.1 距离-多普勒2维分辨单元处理的信号模型
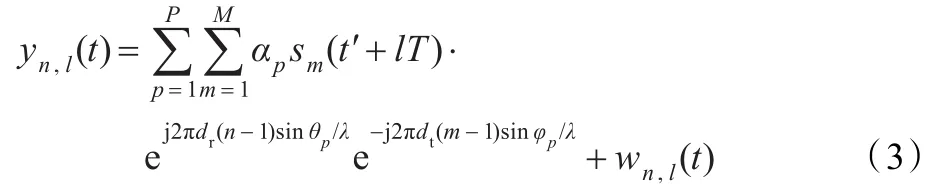
在某已知的距离-多普勒2维分辨单元上,假设目标的个数为P,它是未知的,第 p个目标的发射角、接收角及多普勒频率分别记为,它们也是未知的。各发射阵元同时发射相互正交的脉冲串信号,第m个发射阵元发射的第l个脉冲为:

式中t和t′分别对应慢时间和快时间,T表示脉冲重复周期。sm(t)表示第m个发射阵元的基带信号。则第n个接收阵元接收到的第l个脉冲回波为:

式中,时延τ和多普勒频率 fD对应到该距离-多普勒2维分辨单元,为已知量;wn,l(t)为噪声;αlp为第 p个目标在第l个脉冲的散射系数,假设目标是慢起伏的,即各脉冲的散射系数相同,αlp=αp;λ为载波波长。补偿时延和多普勒频率后可得:
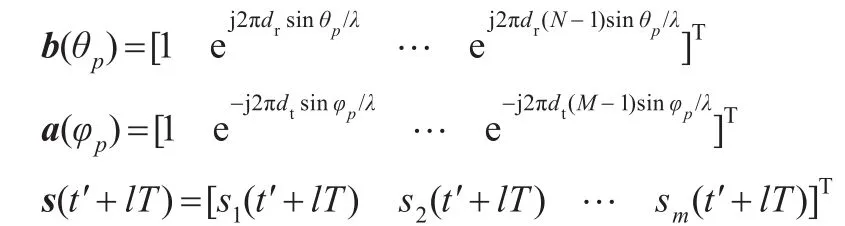
则接收阵列接收的第l个脉冲回波为:

其中:
wl(t)为零均值复高斯噪声,其相关函数设为E[wl(t)wHl(t-τ)]= Σδ(τ),即认为各脉冲的噪声相关函数相同。另外假设不同脉冲的噪声相互独立,即E[wl1(t)wHl2(t)]=0,l1≠l2。
对接收的第l个脉冲回波进行匹配滤波的结果为:
假设各发射信号的能量相等且归一化认为是1,则式(5)可写为:

其中Nl为N×M的噪声矩阵,它的第m列记为nl,m,则:
式(6)为距离-多普勒2维分辨单元处理的信号模型。可见,距离-多普勒2维分辨单元处理后,接收的每个脉冲中的信号部分是一样的。
2.2 距离1维分辨单元处理的信号模型
在某已知的距离1维分辨单元上,假设目标的个数为P,它是未知的,第 p个目标的发射角、接收角及多普勒频率分别记为φp,θp,,它们也是未知的。注意,其中加入了目标的多普勒频率参数,这和距离-多普勒2维分辨单元处理不一样。距离1维分辨单元处理无法获知目标的多普勒频率。发射信号同2.1节,则第n个接收阵元接收到的第l个脉冲回波为:
其中时延τ对应到该距离单元,补偿时延后可得:

则接收阵列接收的第l个脉冲回波为:

对接收信号进行匹配滤波的结果为:

假设信号的正交性对多普勒频率不敏感,即


需要指出的是,为了避免多普勒频率的测量模糊,应假设 ||fDp<0.5。
式(13)为距离1维分辨单元处理的信号模型。可见,与距离-多普勒2维分辨单元处理不同,它接收的每个脉冲中的信号部分并不一样,受到了目标多普勒频率的调制。
3 目标数量估计
本章将根据式(6)和式(13)的信号模型,分别针对距离-多普勒2维分辨单元处理和距离1维分辨单元处理的情况,讨论信息论准则和盖式圆准则在MIMO雷达目标数量估计中的应用。
3.1 距离-多普勒2维分辨单元处理的目标数量估计
式(6)可进一步写为:

其中:
定义接收信号的相关矩阵为:

当脉冲数L较大时,结合式(7),式(15)可近似为:

可见,若P≤min(M,N),则式(16)等式右边第一项的秩为P,因此可对式(16)采用常规的信息论准则或盖氏圆准则求解目标的数量。Σ的非对角元素为零则表示白噪声,反之为色噪声。
(1)信息论准则法
对式(15)定义的R进行特征值分解,得到N个从大到小排列的特征值λ1,λ2,…,λN,则基于信息论准则的目标数量估计为:

其中:
目标函数中 p的取值应小于min(M,N)。C(L)分别取1和(lnL)/2时,可具体对应到AIC和MDL准则,即
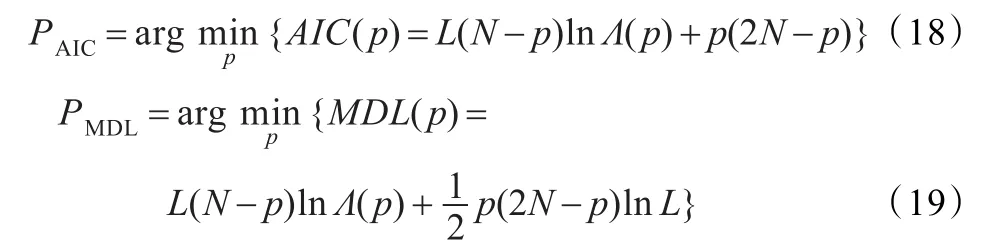
需要指出的是信息论准则是基于白噪声推导的,对于色噪声的情况,其目标数量估计的错误概率将显著增大,甚至完全失效。
(2)盖氏圆准则法
对式(15)定义的对R进行分块如下:

其中R′的维数为(N-1)×(N-1)。对R′进行特征值分解,特征矩阵记为U,即

其中V的对角元素沿对角线方向由大到小排列。构造一个酉变换矩阵T:

对R进行如下的酉变换:

记ρ的第i个元素为 ρi,i=1,2,…,N-1,那么盖氏圆准则的目标函数为:

其中D(L)是一个与快拍数有关的调整因子,取值在0到1之间,当快拍数趋近于无穷时取0。 p的取值范围为[1,min(M,N)-1]。当 p从小到大变化时,假设GDE(p)第一次出现负数时 p的值为p0,则目标数量的估计为PGDE= p0-1。
可见,信息论准则和盖式圆准则可成功运用于距离-多普勒2维分辨单元处理时的目标数量估计。由二者方法的具体过程可知,信息论准则法最多能估计的目标数量为min(M,N)-1,盖式圆准则法最多能估计的目标数量为min(M,N)-2。
3.2 距离1维分辨单元处理的目标数量估计
由式(13)可知,距离1维分辨单元处理时的目标数量估计可直接采用3.1节提供的方法。然而需要指出的是,3.1节的方法最多能识别的目标数目小于min(M,N),这对于距离-多普勒2维分辨单元处理来说,一般是可行的,因为落在某个距离-多普勒2维分辨单元上的目标数量不会太多。但是对于距离1维分辨单元处理,落在某个距离1维分辨单元上的目标数目显然会更多,很有可能超过min(M,N)个,从而导致无法直接采用3.1节的方法。下面针对距离1维分辨单元处理时的信号特点,研究可估计更多目标数量的方法。
将式(13)Zl的各列竖着连接起来构成一个MN×1维的列向量zl,可得:

其中:
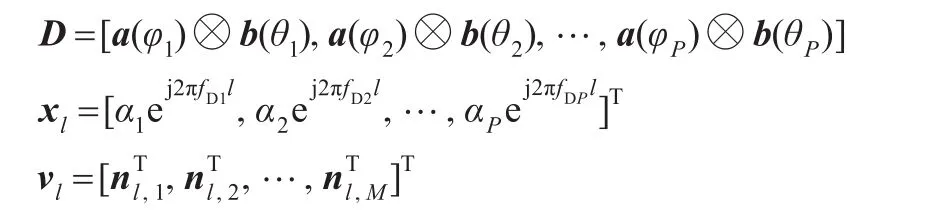
⊗表示Kronecker积。
定义zl的相关矩阵为:

当脉冲数L较大时,
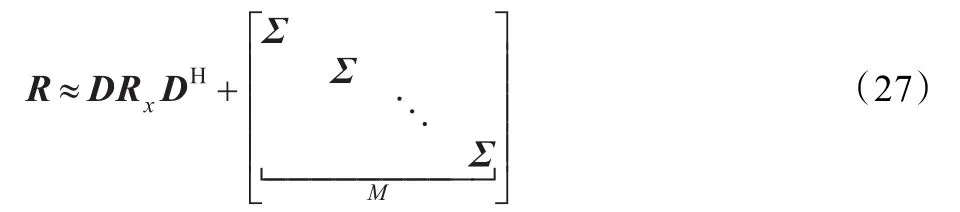
其中:



可写为:式中 c(fDp)=[ej2πfDp,ej4πfDp,…,ejL2πfDp]T。可见,当各目标的多普勒频率互不相等时,[c (fD1),c(fD2),…,c(fDP)]T为行满秩矩阵,即X为行满秩矩阵,因而Rx是满秩矩阵。
可见,若P≤MN且各目标的多普勒频率互不相等,则式(27)等式右边第一项的秩为P。因此,根据式(26),类似于3.1节,目标数量的估计可采用信息论准则或者盖式圆准则,此处不再详述。注意式(26)中的R为MN×MN的矩阵,因而信息论准则法最多能估计的目标数量为MN-1,盖式圆准则法最多能估计的目标数量为MN-2。
4 仿真实验
本章将通过仿真实验,分析信息论准则和盖式圆准则在距离-多普勒2维分辨单元处理和距离1维分辨单元处理时的目标数量估计性能。
4.1 距离-多普勒2维分辨单元处理
发射阵元数目为M=10,接收阵元数目为N=8,收发阵列的间距均设为λ 2。在已知的距离-多普勒2维分辨单元内存在3个目标,它们的发射角和接收角分别为φ1=50°, φ2=10°,φ3=-30°,θ1=30°,θ2=-40°,θ3=0°,目标的散射系数为α1=α2=α3=1。接收的脉冲数为200。
噪声协方差矩阵Σ的模型采用文献[10]中的模型,Σ的第n1行第n2列元素为σ2·ρ ||n1-n2ej(n1-n2)π/2,其中 ρ为相关因子,当ρ=0则噪声为白噪声。盖式圆准则中D(L)=0.5。每个σ2下均做100次实验,正确估计目标数量的次数比上100记为成功概率。图2显示了ρ=0时AIC准则、MDL准则和盖式圆准则对目标数量估计的成功概率随lnσ2的关系,图3显示了ρ=0.5时目标数量估计的成功概率随lnσ2的关系。
由于目标数量为3,小于min(M,N)-2,所以理论上信息论准则和盖式圆准则均可行,仿真实验也验证了其可行性。由图2和图3可见:在白噪声的情况下,lnσ2<0时,信息论准则和盖式圆准则均可有效地估计出目标的数量,成功概率均为1;lnσ2=0.5时,AIC和盖式圆准则的成功概率仍为1,而MDL完全失败;lnσ2>0时全部失败。在色噪声的情况下,lnσ2<0时,盖式圆准则仍可有效地估计出目标的数量;而信息论准则不论噪声方差多大,都无法估计出目标的数量。因此,白噪声时对目标数量的估计可采用信息论准则或盖式圆准则,而色噪声时应采用盖式圆准则。需要注意的是,噪声方差应小于一定值才能确保有效地估计出目标的数量。
4.2 距离1维分辨单元处理
发射阵元数目为M=4,接收阵元数目为N=5,收发阵列的间距均设为λ 2。在已知的距离1维分辨单元内存在4个目标,它们的发射角和接收角分别为φ1=35°,φ2=20°,φ3=0°,φ4=-25°,θ1=-20°,θ2=40°,θ3=20°,θ3=35°,多普勒频率为 fD1=0.11,fD2=-0.21,fD3=0.38,fD4=0.23。目标的散射系数为α1=α2=α3=α4=1。接收的脉冲数为200。噪声协方差矩阵Σ的模型同4.1节。每次的实验次数均为100。图4显示了 ρ=0时AIC准则、MDL准则和盖式圆准则对目标数量估计的成功概率随lnσ2的关系,图5显示了 ρ=0.5时目标数量估计的成功概率随lnσ2的关系。
由图4和图5可见,与4.1节的结论类似:在白噪声的情况下,lnσ2<0时,信息论准则和盖式圆准则均可有效地估计出目标的数量,MDL和盖式圆准则的成功概率均为1,AIC的成功概率0.9以上;lnσ2=0.5时,盖式圆准则性能迅速恶化,而信息论准则勉强仍具备一定的有效性;lnσ2>0时几乎全部失败。在色噪声的情况下,lnσ2<0时,盖式圆准则可有效地估计出目标的数量;而信息论准则不论噪声方差多大,都基本无法估计出目标的数量。因此,白噪声时对目标数量的估计可采用信息论准则或盖式圆准则,而色噪声时应采用盖式圆准则。
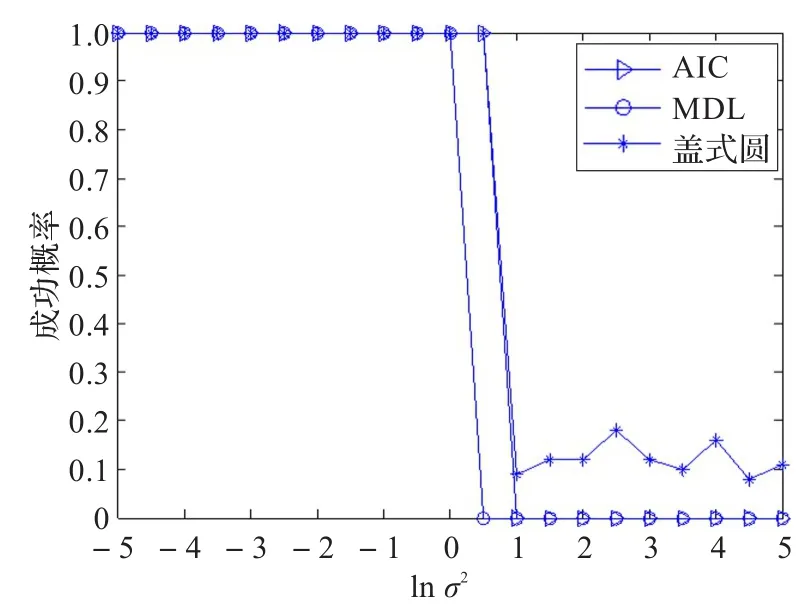
图2 ρ=0时目标数量估计成功概率随σ2的关系
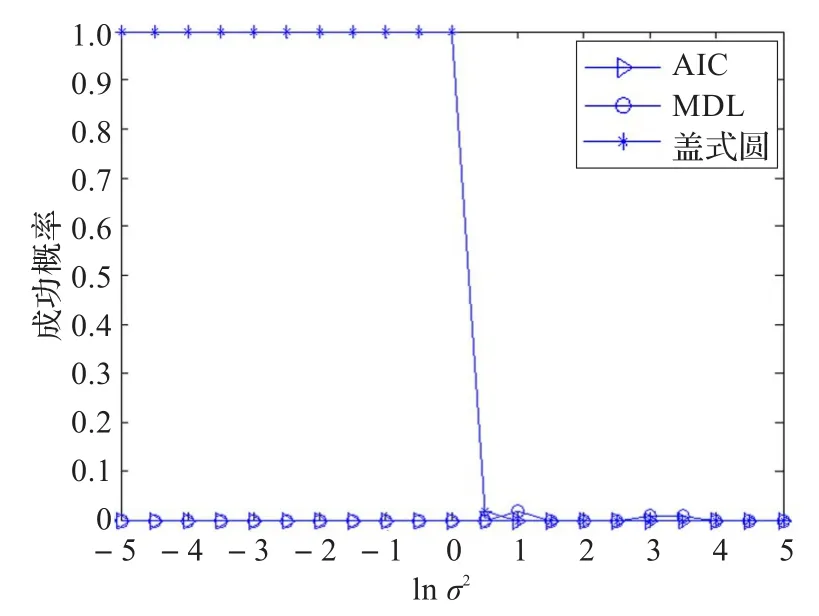
图3 ρ=0.5时目标数量估计成功概率随σ2的关系
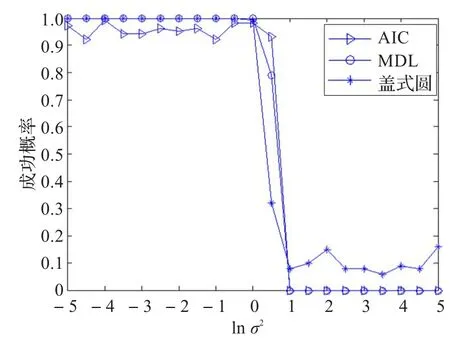
图4 ρ=0时目标数量估计成功概率随σ2的关系
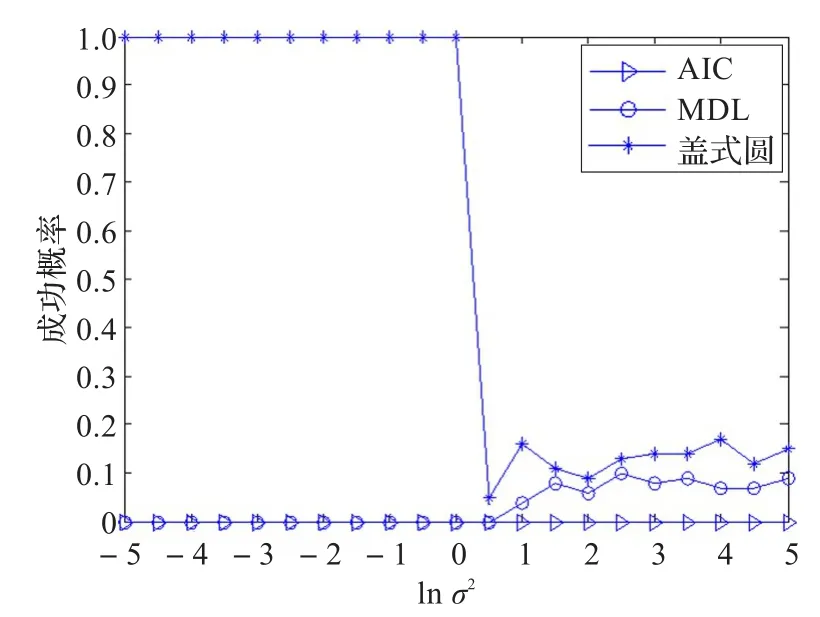
图5 ρ=0.5时目标数量估计成功概率随σ2的关系
5 结论
本文研究了MIMO雷达在距离-多普勒2维分辨单元处理和距离1维分辨单元处理情况下的目标数量估计方法,讨论了信息论准则和盖式圆准则在MIMO目标数量估计中的应用。针对2维分辨单元处理和1为分辨单元处理,分别构造相关矩阵,给出方法的具体过程,并指出了最多能估计的目标数量上限。仿真结果表明,在噪声方差小于一定值时,本文方法可有效地估计出目标的数量。在白噪声情况下,信息论和盖式圆准则均可有效地估计出目标的数量,2维分辨单元处理时AIC和盖式圆准则性能比MDL要略好,1维分辨单元处理时MDL和盖式圆准则性能比AIC要略好;在色噪声情况下,信息论准则无法估计出目标的数量,而盖式圆准则可有效地估计出目标的数量。
[1]Li Jian,Stoica P.MIMO radar signal processing[M].[S.l.]:John Wiley&Sons Inc,2008:153-170.
[2]张娟,张林让,刘楠.MIMO雷达最大似然波达方向估计方法[J].系统工程与电子技术,2009,31(6):1292-1294.
[3]谢荣,刘峥.基于多项式求根的双基地MIMO雷达多目标定位方法[J].电子与信息学报,2010,32(9):2197-2220.
[4]Chen Jin-li,Gu Hong,Su Wei-min.Angle estimation using ESPRIT without pairing in MIMO radar[J].Electronics Letters,2008,44(24):1422-1423.
[5]Bencheikh M L,Wang Y.Joint DOD-DOA estimation using combined ESPRIT-MUSIC approach in MIMO radar[J].Electronics Letters,2010,46(15):1081-1083.
[6]郑志东,张剑云,熊蓓蕾.双基地MIMO雷达的DOD和DOA联合估计[J].系统工程与电子技术,2010,32(11):2268-2272.
[7]Jin Ming,Liao Gui-sheng,Li Jun.Joint DOD and DOA estimation for bistatic MIMO radar[J].Signal Processing,2009,89(2):244-251.
[8]吕晖,冯大政,和洁,等.一种新的双基地MIMO雷达目标定位和多普勒频率估计方法[J].电子与信息学报,2010,32(9):2167-2171.
[9]王永良,陈辉,彭应宁,等.空间谱估计理论与算法[M].北京:清华大学出版社,2004:40-52.
[10]Stoica P,Cedervall M.Detection test for array processing in unknown correlated noise fields[J].IEEE Trans on Signal Processing,1997,45(9):2351-2362.
WU Yuebo,YANG Jingshu,LIU Shichun
PLA Electronic Engineering Institute,Hefei 230037,China
The signal models of MIMO radar are described in both range-Doppler two dimensions processing and range one dimension processing situations.The correlation matrixes are constructed based on the characters of the signal models,and then the information theory and Gerschgorin disks criteria are used in the target number estimation for MIMO radar.Simulation results suggest that the information theory and Gerschgorin disks criteria are available in white noise,and the Gerschgorin disks criterion is effective in colored noise.
information theory;Gerschgorin disks;MIMO radar;target number estimation
给出MIMO雷达在距离-多普勒2维分辨单元处理和距离1维分辨单元处理情况下的信号模型。根据这两个信号模型各自的特点,分别构造信号的相关矩阵,将信息论准则和盖式圆准则应用于MIMO目标数量估计之中。仿真结果表明在白噪声情况下,信息论和盖式圆准则均可有效估计目标数量;在色噪声情况下,盖式圆准则可有效估计目标数量。
信息论;盖式圆;MIMO雷达;目标数量估计
A
TN958
10.3778/j.issn.1002-8331.1107-0516
WU Yuebo,YANG Jingshu,LIU Shichun.Target number estimation for MIMO radar.Computer Engineering and Applications,2013,49(5):200-204.
吴跃波(1984—),男,博士研究生,主要研究领域为MIMO雷达、阵列信号处理;杨景曙(1950—),男,博士生导师,教授;刘世春(1973—),男,工程师。E-mail:yuebowu@163.com
2011-07-25
2011-09-26
1002-8331(2013)05-0200-05
CNKI出版日期:2011-11-14 http://www.cnki.net/kcms/detail/11.2127.TP.20111114.0939.021.html
猜你喜欢
数学物理学报(2020年1期)2020-04-21
成都信息工程大学学报(2017年5期)2018-01-23
系统工程与电子技术(2016年7期)2016-08-21
成都信息工程大学学报(2016年6期)2016-06-01
电子器件(2015年5期)2015-12-29
现代电子技术(2015年11期)2015-07-28
浙江共产党员(2015年11期)2015-05-23
机械与电子(2014年2期)2014-02-28
湖南水利水电(2014年2期)2014-02-27
电子设计工程(2014年8期)2014-02-27