
BLDCM无位置传感器控制系统仿真及实验研究
2013-07-03 06:07焦晓雷高延丽
兵器装备工程学报 2013年6期
焦晓雷,高延丽,潘 劲,郭 崇
(1.国电南瑞科技股份有限公司电控分公司,南京 210061;2.湖南电力公司检修分公司,长沙 410012)
传统直流电机采用电刷以机械方式换向,因而存在噪声、火花和无线电干扰等问题,而且制造成本高、维修比较困难。无刷直流电机用电子换向替代传统直流电机的机械换向装置,使得它同时具有了传统直流电机易于控制以及异步电机结构简单、成本低的优点,从而在航空航天、数控机床、机器人、办公自动化等许多领域得到了广泛应用[1]。然而,传统的无刷直流电机一般采用外置式位置传感器对转子位置信号进行检测,不仅会使电机的成本增加、结构复杂、体积与重量增大,同时也会降低电机的运行可靠性,大大增加了电机的生产和维修的难度[2]。因此研究无刷直流电机无位置传感器控制技术是目前的一个重要方向[3]。
本文首先建立了无刷直流电机的数学模型,分析了无刷直流电机无位置传感器的工作原理,建立了无刷直流电机的仿真模型,最后通过实验验证了所搭建BLDCM 无位置传感器控制系统的有效性和准确性。
1 无位置传感器BLDCM 工作原理分析
1.1 无刷直流电机的数学模型
采用具有梯形反电动势的无刷直流电机,三相桥式Y 形联接,120°两两导通方式。其中假设无刷直流电动机在工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称。无刷直流电机等效主电路原理如图1 所示。

图1 无刷直流电机等效主电路
在此电路拓扑结构下,无刷直流电机的三相电压子系统数学模型为

其中:Va,Vb,Vc为三相定子绕组输入端对地参考电压;ia,ib,ic为定子绕组相电流;ea,eb,ec为定子绕组反电动势;R 为定子绕组相电阻;L 为绕组电感;Ls为每相绕组自感;M 为每两相绕组间互感;V0为中点电压。
无刷直流电机运动子系统数学模型为

其中:ω 为转子机械角速度;Te,Te、Tl分别为电磁转矩,负载转矩;J 为转子的转动惯量;Bv为黏滞摩擦系数。
1.2 BLDCM 无位置传感器工作原理
无刷直流电机的位置检测方法主要有:端电压积分法、电压检测法、电流检测法、三次谐波电压检测法、反电动势法等。本文中采用的是线反电动势过零点检测法。
无刷直流电机采用的是二二导通方式,所以在每一刻只有两相导通,这两相电流大小相等方向相反,另一相相电流为零,所以三相电流的总和为零,当电机只有两相导通时,将式(1)中三式相加可得电机的线反电动势为
由式(4)和(5)可知,电机转子位置与电机相反电动势和线反电动势密切相关。相反电动势过零点作30°电角度的延时,就是电流的换相点。而线反电动势的过零点则直接就是换相点,不需要再作任何延时。图2 为相反电动势、线反电动势与电机转子换相点的示意图。由图可知,线反电动势与电机转子位置的关系比起相反电动势与电机转子位置的关系更直观。
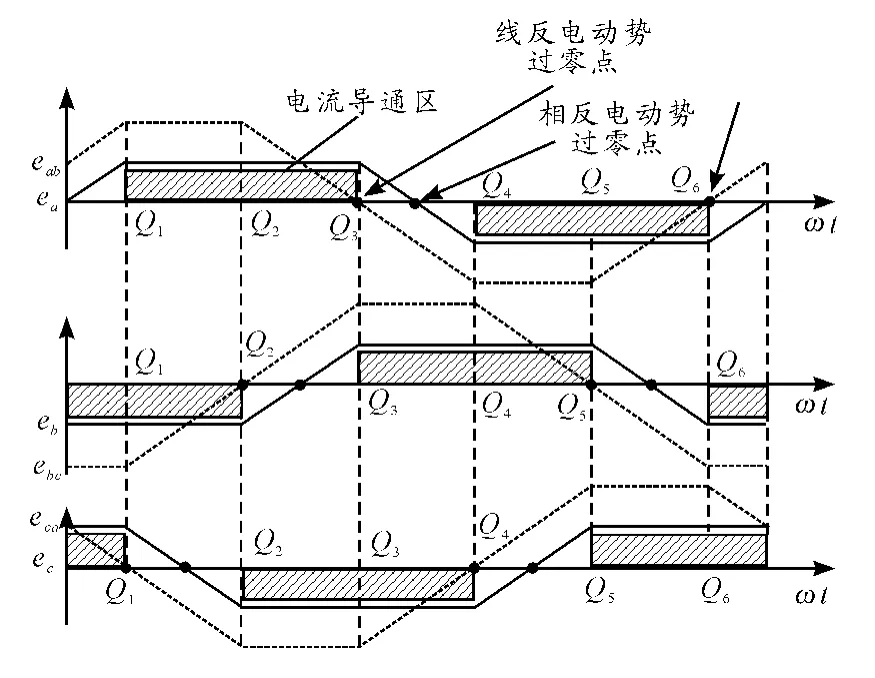
图2 相反电动势、线反电动势与电机转子换相点关系
2 BLDCM 无位置传感器控制系统仿真分析
无位置传感器电机模型中没有传感器模型,换相信号是由线反电动势过零点检测法得到的。但是反电势法在电机起步阶段并不适用,本文仿真系统中采用三段位启动法[4],起动阶段结束后,通过切换开关切换至普通的PI 控制。
基于上文分析,通过Matlab 搭建无位置传感器无刷直流电机的仿真模型,如图3 所示。模型中主要包括无刷直流电机本体模块、电压逆变模块、电机启动模块、相电压采集模块、速度控制模块等。仿真中电机模型采用参数:额定电压UN=500 V;额定转矩TN=3 N·m;额定转速为nN=3 000 r/min。
图4 为利用三段位启动法得到的电机转子位置电角度图,可见在电机启动阶段,电机转速是在不断上升。
图5 为线反电动势与各个时刻换相点之间的关系。可见,结果与前文理论文分析一致,三个线反电动势的过零点,就是换相点。

图3 无位置传感器无刷直流电机仿真系统
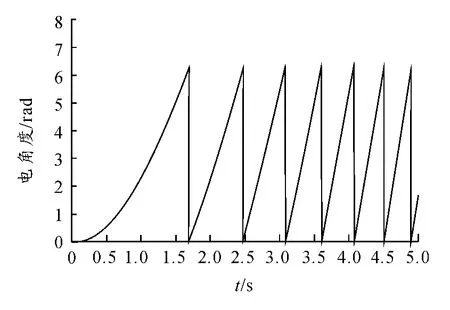
图4 电机起动阶段转子位置电角度

图5 电机三相线反电动势与换相点
图6 为电机空载下的转速响应曲线。由图可知,利用“三段式”方法启动转速能够在较短时间时跟踪给定转速,能达到较理想的起动效果。起动完毕后,系统通过切换开关切换到电流和转速双闭环PI 控制,能够达到较理想的控制效果。

图6 电机转速响应曲线
3 无位置传感器控制系统实验分析
基于美国TI 公司高性能数字信号处理器TMS320F2812搭建BLDCM 无位置传感器控制系统,主要由主电路、采样电路、驱动电路和保护电路等组成[5-8]。系统的硬件控制框图如图7 所示。
主控制板由DSP2812 和外围电路组成,完成控制算法,输出驱动信号,对输出输入信号进行处理;电流采样电路采用外部AD 芯片AD7864;驱动板电路的核心部分是功率管MOSFET 和驱动芯片构成的逆变装置,通过接收DSP 发出的6 路PWM 信号,并把PWM 信号加上专门的驱动电路构成MOSFET 的控制电路。TMS320F2812 主频高达150 MHz,它的高速计算性能为实现实时智能控制算法提供了良好的平台,而且系统的控制精度高抗干扰能力较强。无刷直流电机硬件控制系统如图8 所示。

图7 硬件控制系统框图

图8 无刷直流电机硬件控制系统
实验电机参数如表1 所示。
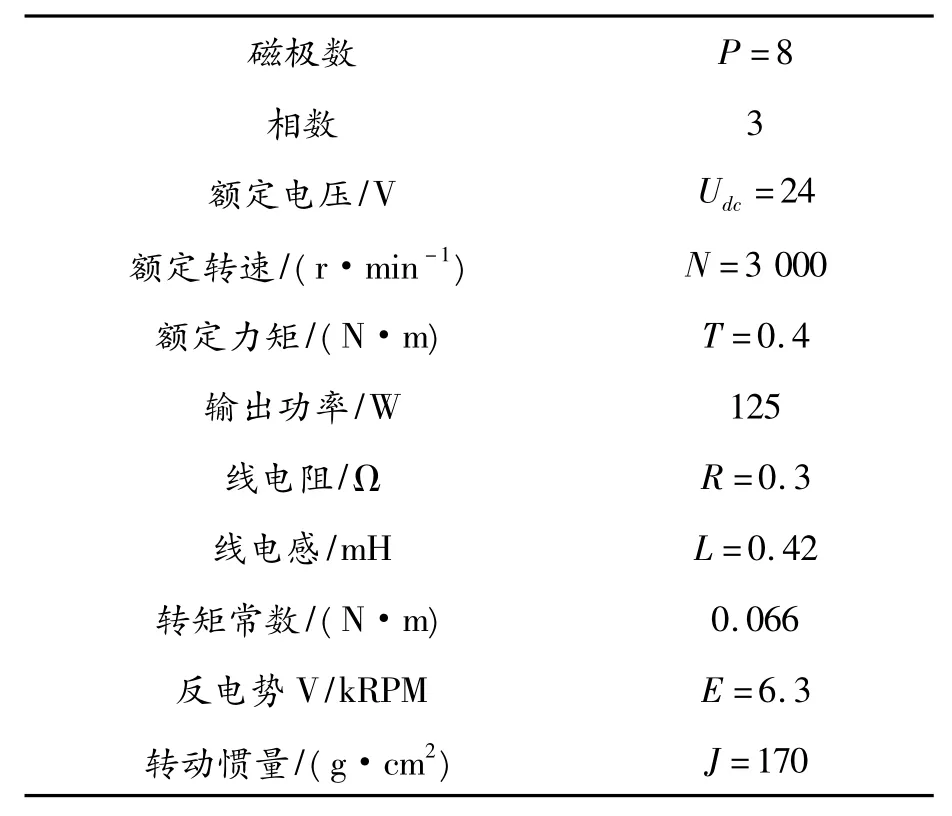
表1 实验电机参数
图9 为电机空载运行时AB 线电压的波形,因为系统在采样时加了滤波电容,故图中的电压波形没有出现二极管续流引起的脉冲。

图9 AB 两相线电压波形
图10 为空载时T1 功率管的PWM 驱动信号波形。通过反电动势确定转子位置信号后,经变换得到的T1 功率管的PWM 驱动信号波形。

图10 空载时T1 功率管的PWM 换相信号波形
从图9 和图10 可以看出,在电机的空载运行过程中,本文设计的控制系统能够比较准确的预测转子的位置信号,从而为电机提供准确的换相信息,电机运行情况平稳。
4 结束语
本文主要研究无刷直流电机无位置传感器控制系统,通过理论分析和实验验证得出了以下结论:
1)采用DSP 实现了BLDCM 无位置传感器控制,控制系统结构简单、速度快、便于扩展,同时由于DSP 优异的控制性能和速度,系统还可以实现更为复杂的控制算法。
2)采用线反电动势法在线电压与转子位置之间建立了联系,大大简化了系统分析的计算难度。同时,系统能够较准确的检测到转子的位置信号,并能为电机提供准确的换相信号。实验运行结果与仿真波形一致,证明了所设计系统的有效性和合理性。
[1]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2004:24-27.
[2]罗隆福,杨艳.无刷直流电动机中有待深入研究的主要问题[J].微特电机,2008,28(5):15-16.
[3]夏长亮,王娟.史婷娜,等.无刷直流电机无位置传感器控制下的转矩波动抑制新策略[J]. 天津大学学报,2005,38(5):432-436.
[4]杜晓芸,林瑞光,吴建华.无位置传感器无刷直流电机的控制策略[J].电机与控制学报,2002,6(1):21-25.
[5]Zhou Fu,Li BeiZhi,Yang Jiangu,et al. A Sliding Model Speed Position Obeyer Integrated with a PI Controller for PM Synchronous Morors[C]//Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics.China Sanya,2007,12:1372-1377.
[6]韩安太,刘峙飞,黄海.DSP 控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[7]WUHX,CHENG S K,CUI SM.A controller of brushless DC motor for electric vehicle[J].IEEE Transactions on Magnetics,2005,41(1):509-513.
[8]Shi Tingna,Tian Yang,Xia Changliang.Position sensorless control based on wavelet neural netwok for PM brushless DC motors[J].Journal of Tianjin University,2007,40(2):190-194.
猜你喜欢
大电机技术(2022年5期)2022-11-17
微电机(2022年8期)2022-10-12
汽车实用技术(2022年12期)2022-07-05
建材发展导向(2021年19期)2021-12-06
内蒙古科技与经济(2021年3期)2021-03-09
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
航天电子对抗(2017年6期)2018-01-22
科教导刊·电子版(2017年16期)2017-07-21
电子制作(2017年1期)2017-05-17
