
Petri网在某型舰炮防御过程中的应用
2013-07-03 06:06张志瑞
兵器装备工程学报 2013年6期
王 鼎,张志瑞,郑 刚
(海军驻包头地区军代室,包头 014030)
随着现代军事技术的发展,水面舰艇在作战过程中面临来自水面、空中和水下的各种威胁,几乎是全方位、全立体的,主要包括各种导弹、舰炮、鱼雷的攻击,所以防御是一个很复杂的攻防对抗过程,其间涉及的可变因素很多,舰艇如何进行科学有效的防御,保持战斗力也就成了一个需要解决的问题。舰炮是舰艇上的主要武器,某型舰炮是一种能够在其舰炮武器系统的指挥控制下,完成对空、对海和对陆上目标进行射击的高射速全自动火炮,该炮具有全自动操作、发射率高、精度高、重量轻、瞄准速度和瞄准加速度高、可更换3种弹型并进行发射等优点。某型舰炮的防御是一个离散事件过程,且事件的发生具有并行、异步和随机等特点。
Petri 网是一种可应用到许多系统和领域的图形和数学分析工具,它能够描述和分析具有并行、不确定性、异步和分布式特点的系统。Petri 网不但具有类似流程图的可视化描述能力,还可以通过标记在网内的流动揭示系统动态行为,这是一般的工具所不具有的功能。目前,国际上对Petri 网理论和应用的研究方兴未艾,出现了许多改进的Petri 网模型,如随机Petri 网、谓词Petri 网、颜色Petri 网等,从而大大拓宽了Petri 的应用范围和描述能力。
本文对Petri 网用于某型舰炮的防御过程作了初步研究,提出了防御过程的Petri 网表示方法并对该Petri 网做出了相应的说明和仿真,最后对该炮射击的决策过程做了定量的描述。
1 某型舰炮的防御流程
一般情况下,某型舰炮防御的作战过程大致可以分为侦测识别、跟踪解算和射击拦截3 个阶段[1],整个作战流程如图1 所示。

图1 舰炮防御流程
侦测识别阶段需要完成目标侦察、搜索,目标跟踪与识别,目标威胁判断及攻防决策,武器射前检查及射击准备;跟踪解算阶段要继续完成确定跟踪解算航路并实施接敌跟踪,解算目标运动要素;射击拦截阶段的主要工作包括精确解算目标运动要素,计算武器射击诸元,完成射击准备及瞄准射击。武器射击结束后,需要根据射击效果,如击中目标或没有命中目标确定下一步的战术行动。
2 Petri 网模型定义
本文所说的Petri 网,严格意义上说是库所容量为无穷的库所∕变迁网系统(P ∕T 系统),这里只给出几个主要概念的定义,其他概念与性质参阅文献[2-3]。
定义1 Petri 网是一个六元组∑=(S,T;F,K,W,M),当且仅当:①S∪T≠∅;②S∩T=∅;③F⊆(S×T)∪(T×S);④dom(F)∪cod(F)=S∪T;其中:dom(F)={s∈S∪T|∃t∈S∪T:(s,t)∈F};cod(F)={s∈S∪T|∃t∈S∪T:(t,s)∈F};⑤K:S→N+∪{∞};⑥W:F→N+;⑦M:S→N,满足:∀s∈S:M(s)≤K(s)。其中S 元素是库所(place),T 元素是变迁(transition),F 元素是流关系(flow relation),K 是库所容量函数(capacity function),W 是弧权函数(weighted function),M 是标识(marking),N+={1,2,3,…},N ={0,1,2,…}。
以上定义说明Petri 网是由库所、变迁及它们之间的流关系所构成的一个动态网,通过引入变迁发生规则(transition firing rule)的定义,可以使得标记(token)在网中流动,Petri 网的标识不断更新,从而描述系统的动态过程。
定义2 变迁发生规则[1]:令∑=(S,T;F,K,W,M)是一个Petri 网,则:
1)对于变迁t∈T,变迁t 在标识M 有发生权(enabled,记为M[t >)的条件为

2)若M[t >,则在标识M 下,变迁t 可以发生(fire),从标识M 发生变迁t 得到一个新的标识M'(记为M[t >M'),则对∀s∈S,
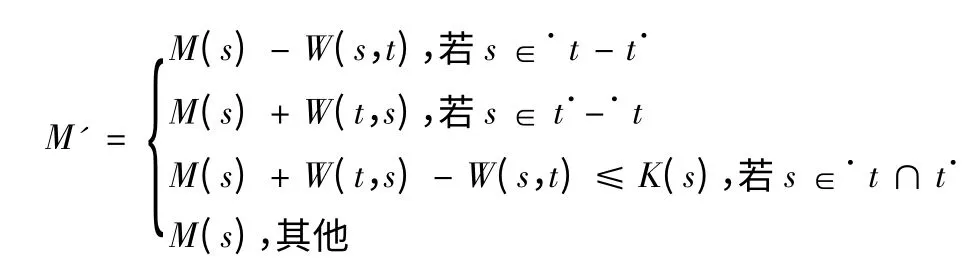
其中·t={s|s∈S∪T∧(s,t)∈F},t·={s|s∈S∪T∧(t,s)∈F}分别称为t(t∈T)的前集和后集。
3 舰炮防御过程的Petri 网描述
3.1 舰炮防御过程的Petri 网模型
图2 是舰炮防御过程的Petri 网模型,每个库所表示所处的作战状态,每个变迁表示作战状态的转换,它们都和一定的战术规则相关联(见表1 和表2)。
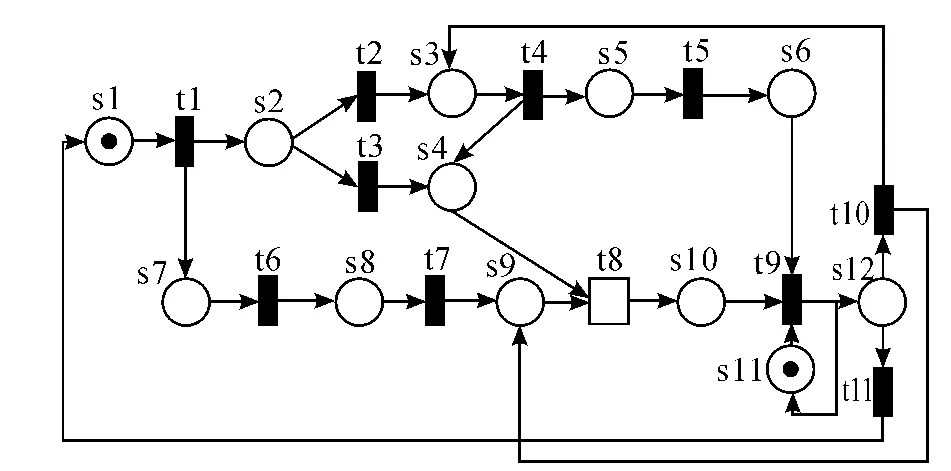
图2 舰炮防御过程的Petri 网模型
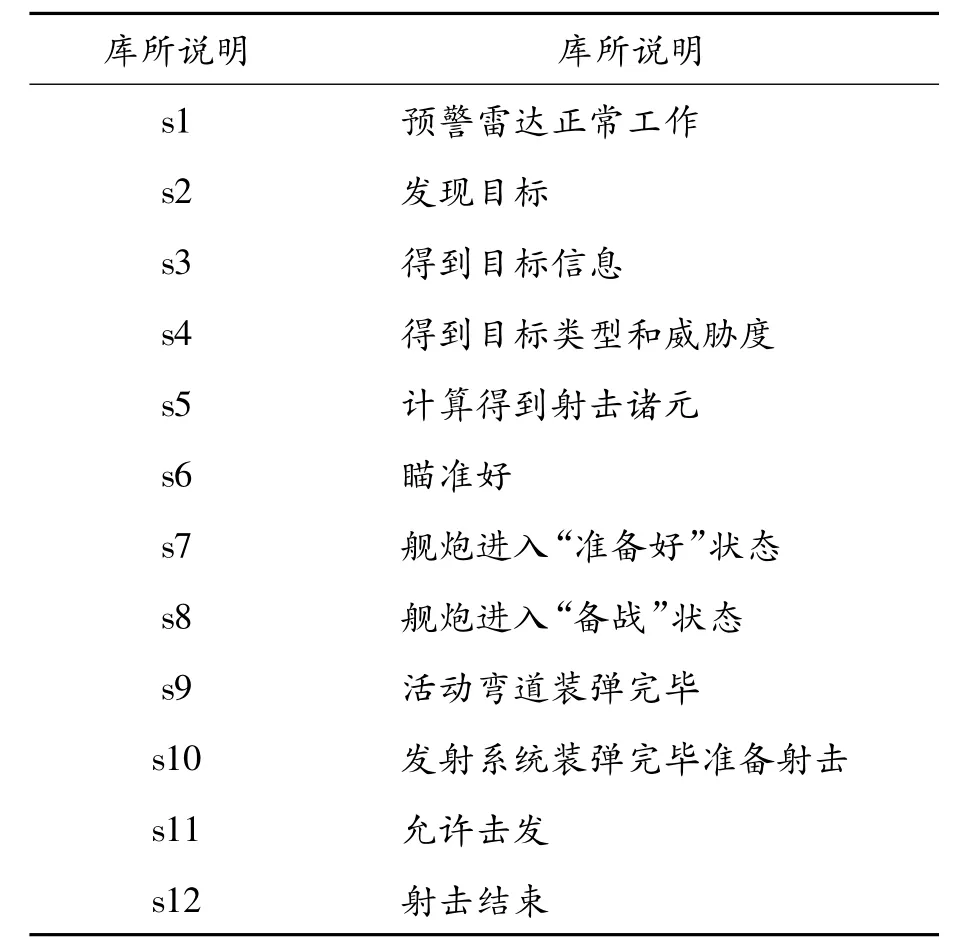
表1 Petri 网库所元素说明
3.2 舰炮防御过程的Petri 网说明
某型舰炮主要有4 种状态:“平时”状态、“准备好”状态、“备战”状态和“维修”状态。s7 就表示该舰炮处于“准备好”的状态,当预警雷达发现目标后马上进行总体启动,使其进入“备战”状态,与此同时跟踪雷达开始工作对发现的目标进行跟踪,相应的机构也对目标进行威胁判断。舰炮进入“备战”状态后向活动弯道供弹,到达s9,跟踪雷达也把相应的目标信息传给火控计算机,由其解算射击诸元,到达s5,与此同时也可通过火控计算机得到的目标信息进行威胁判断,所以通过变迁t4 可到达库所s4。活动弯道有弹后,结合威胁判断的结果做出决策如何对发射系统进行装弹,装弹完毕进入“准备射击”状态s10。火控计算机也要把射击诸元传给炮瞄雷达进行瞄准,当接收到“瞄准好”和“击发允许”后才能进行射击。射击结束后给代表“击发允许”的库所s11一个标志以保证它在整个射击过程中都有标志。若未击中目标则通过变迁t10 返回到目标信息的状态s3 进行校射后再次击发,同时射击结束后在马达的带动下活动弯道也供弹完毕,所以赋予s9 一个标志;若击中目标则通过变迁t11 返回到初始状态再次进行搜索目标。

表2 Petri 网同战术规则相关联的变迁说明
3.3 击发命令决策过程的定量描述
在上述所建立的Petri 网中变迁t8 是用一个无色的矩形表示的,不同于其他变迁,这是因为该舰炮在发射系统装弹过程中能够随意更换Ⅰ型、Ⅱ型、Ⅲ型这3 种弹型的炮弹并进行射击(其中Ⅰ型为常规弹,Ⅱ型和Ⅲ型为特种弹),在射速方面有高、中、低3 种选择,如果所选的是特种弹还可以选择点射和连射,连射的发数又分为了2,3,6。针对不同类型,不同威胁度的目标究竟该选择哪种类型的炮弹采用哪种方式进行射击,这是一个决策问题。为使决策过程理想化,做如下规定:
1)若目标识别为水面目标,就选用Ⅰ型弹,若为空中目标就选用Ⅱ型弹,若为陆上目标就选用Ⅲ型弹。
2)通过威胁判断计算出各个目标的威胁度,首先对威胁度进行归一化处理,若威胁度在区间[0.7 1]内,就选用高射速,若在区间(0.3 0.7)内就选用中射速,若在区间[0 0.3]内就选用低射速。
3)当选用特种弹时,若目标为单目标就选用点射,若目标为2 个连射就选用2,若目标为3 个连射就选用3,当目标大于3 个时连射就选用6。
3.4 舰炮防御过程的Petri 网仿真运行
用可达标识图来表示Petri 网的仿真结果,以图2 所示的Petri 网作为仿真运行对象。通常,初始状态M0=[1,0,0,0,0,0,0,0,0,0,1,0],由于该Petri 网的库所较多,这种表示方法比较烦琐,本文采用一种自定义的简化方式进行描述,仅把有标识的库所序号表示出来,例如,对于初始状态M0,只有第1 个和第11 个库所有标识,就把M0记为:M0=[1,11]。通过图3 的可达标识图可以看出,可达标识图是贯通的。因此只要按与战术规则相吻合的序列运行,可达标识图就是贯通的,这说明对某型舰炮防御过程用Petri 网建模仿真是成功的。相反地,如果按与战术规则不吻合的序列运行,则不会得到正确的运行结果,这也说明了对该问题用Petri 网建模仿真的严密性[4]。

图3 Petri 网可达标识图
4 结束语
本文对某型舰炮的防御过程做了初步研究,建立了相应的Petri 网模型,使战术规则与变迁相关联,同时对Petri 网也进行了说明并对射击的决策过程做了定量描述,最后通过可达标识图对建立的Petri 网进行了仿真运行,仿真结果说明所建立的模型是严密的。从而为下一步研究整个舰艇的防御提供了理论基础。
[1]雷军高,张从智.基于Petri 网的潜艇CGF 鱼类攻击行为建模[J].情报指挥控制系统与仿真技术,2005,27(5):37-40.
[2]袁崇义.Petri 网原理与应用[M].北京:北京电子工业出版社,2005:18-40.
[3]吴哲辉.Petri 网导论[M].北京:北京机械工业出版社2006:1-12.
[4]段浩,胡宗武.鱼类发射过程控制序列的Petri 网仿真分析[J].系统仿真学报,2001,14(2):1064-1066,1072.
[5]谭乐祖,杨明军,任东彦.弹炮结合防空动态火力分配模型[J].火力与指挥控制,2011(1):177-180.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
快乐语文(2021年27期)2021-11-24
军事文摘(2021年16期)2021-11-05
军事文摘·科学少年(2021年8期)2021-09-10
航空发动机(2020年6期)2021-01-12
航天制造技术(2020年6期)2021-01-05
华侨大学学报(自然科学版)(2020年1期)2020-02-27
汉语世界(The World of Chinese)(2019年1期)2019-03-18
海峡姐妹(2018年5期)2018-05-14
计算机系统应用(2018年2期)2018-03-02
