
基于Pro/E多姿态挖掘机虚拟样机建模及仿真分析*
2013-06-28 09:51罗金良张亚龙
机械研究与应用 2013年6期
张 稳,罗金良,张亚龙
(南华大学,机械工程学院,湖南 衡阳 421001)
1 前言
液压挖掘机在工业与民用建筑、道路建设、水力、矿山、市政工程等土石方施工中均占有重要位置,是交通运输、能源开发、城镇建设以及国防施工等各项工程建设的重要施工设备,是国民经济建设迫切需要的装备。然而,在作业环境相对恶劣的环境中,一般的轮式、履带式挖掘机无法正常、有效地工作。为此,设计一款底盘能够根据工作环境的改变而改变工作姿态的工程机械成为了研究热点。笔者设计了具有多姿态、采用四轮驱动、具有很强的路面适应性和越障能力,在浅水、沼泽、山地等环境中都能够正常作业的挖掘机[1]。并利用Pro/E软件建立挖掘机的三维立体模型并进行整体装配,运用其机构运动仿真模块进行各零部件运动干涉检查及行走机构工作作用点的运动轨迹、位置和速度分析。
此采用Pro/E设计的挖掘机虚拟样机的结构,在采用四轮驱动、控制时具有很强的路面适应性和越障能力,在浅水、沼泽、山地等环境中都可正常作业。采用传统的设计方法,需要制造多个物理样机,设计周期长、成本高等弊端,如何提高产品的设计质量,降低产品的研发成本,进行创新性设计,又快又好设计出满足不断变化市场的需求。虚拟样机技术(Virtual Prototyping)的应用很好地解决了这些问题[2]。Pro/E是一款基于特征的全参数化建模软件,目前有80多个专用模块,功能强大。
利用Pro/E可方便的设计各零部件的三维立体模型并进行整体装配,运用其机构运动仿真模块能够进行各零部件运动干涉检查及行走机构工作时作用点的运动轨迹、位置和速度分析。
2 虚拟样机的建立
构造虚拟样机必须进行机械零部件的三维实体造型。三维实体模型的构筑对于虚拟样机的仿真和分析十分重要[3],必须充分理解所构造的机械结构的各个零部件的外形以及他们之间的相对位置和装配关系,才能保证虚拟仿真的顺利进行。
本样机整机模型由回转体、行走机构和工作装置组成,其中行走机构对行走能力起到决定性作用,在此重点介绍行走机构。
(1)行走机构是由4个分支组成,每个分支机构由铰接、关节、支撑臂、车轮及两个液压缸组成,如图1~5所示。

图1 行走机构分支装配图
(2)分支机构的装配。在装配中机构中各零件之间的约束类型如下表1所列。
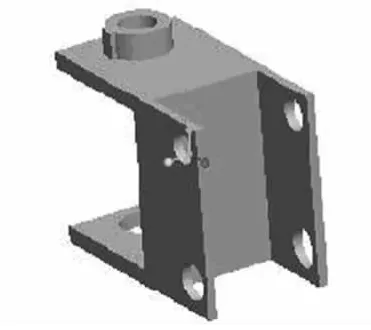
图2 铰接

图3 关节
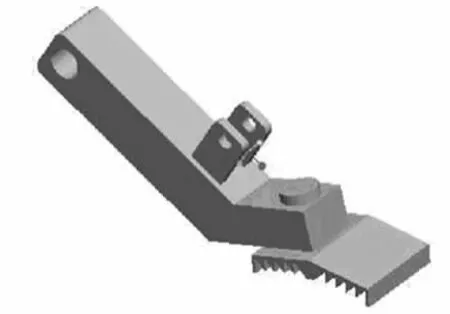
图4 支撑臂
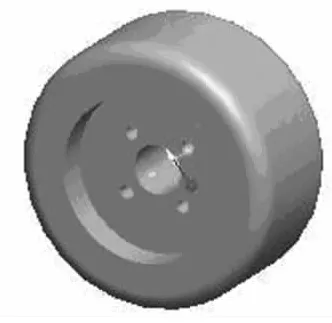
图5 车轮

表1 分支机构零件约束类型
其中液压缸1和液压缸2的两缸筒采用圆柱连接,分别称圆柱连接1和圆柱连接2。
(3)虚拟样机的整机模型。如图6所示。

图6 虚拟样机整机模型
3 行走机构运动学分析
3.1 添加驱动
各行走机构的运动都是独立的,所以运动学仿真只需研究行走机构的1个分支在空间内完成回转和伸缩运动。根据运动仿真分析的要求,需添加3个驱动,均为伺服电动机。
(1)在销钉铰接上添加旋转伺服电动机,使分支机构整体绕连结上通孔轴线做旋转运动。旋转伺服电动机作用时间及速度采用模选项中表的方式确定,0~10 s内速度为5°/s;10~30 s内速度为-5°/s;30~40 s内速度为5°/s。
(2)在圆柱副1上添加移动伺服电动机1,控制关节在竖直方向的位置。移动伺服电动机1的作用时间及速度采用模选项中表的方式确定,0~40 s内速度为0;40~50 s内速度为-20 mm/s;50~61 s内为20 mm/s。
(3)在圆柱副2上添加移动伺服电动机2,控制支撑臂在竖直方向的位置。移动伺服电动机2的作用时间及速度采用模选项中表的方式确定,0~61 s内,速度为0;61~67 s内为-20 mm/s;67~72 s内,速度为20 mm/s。
3.2 机构分析及干涉检验
运动学仿真可确定所关心点的位移、速度、加速度的变化范围[4]。
伺服电动机定义完成后,进入机构分析界面。分析类型选择为运动学分析,开始时间设为0,终止时间为73 s,点击运行,开始运动学分析。观察仿真过程,保存仿真结果。点击回放,进行碰撞检测设置,设置为部分碰撞检测,进行碰撞检测。
3.3 仿真结果及分析
3.3.1 运动分析
干涉检验完成后,新建测量量measure1,测量类型为位置,测量点为支撑臂的末端,以底座中心坐标PRT_CSYS_DEF为measure1的参考坐标系,测量分量为X分量;新建测量量measure2,测量类型为位置,测量点为支撑臂的末端,选取坐标系PRT_CSYS_DEF为参考坐标系,测量分量为Y分量,评估方法默认为每个时间步长。测量结果如图7、8所示。
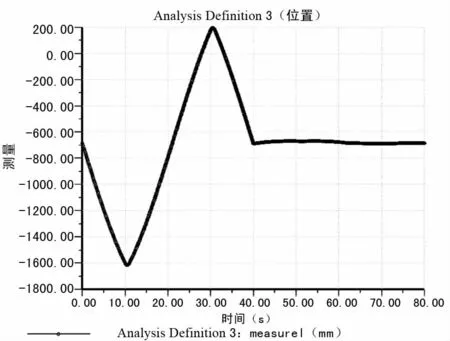
图7 前臂末端水平方向的位移变化曲线
进入回放界面,创建运动包络图,即行走机构运动过程中所能触及到的位置。选取元件对话框一栏选取铰接、关节、支撑臂、车轮为对象,输出格式为零件,使用缺省模块,创建运动包络[5],结果如图9所示。

图8 前臂末端竖直方向的位移变化曲线
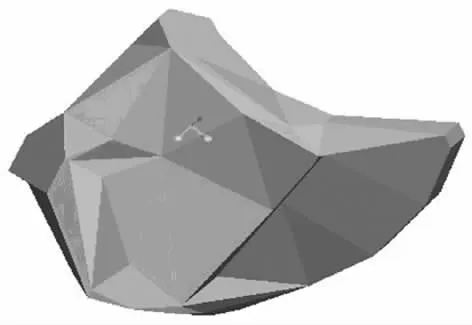
图9 行走机构分支的运动包络图
3.3.2 适应性分析
分支机构的自由度P=3,分别为铰接绕Z轴方向的转动自由度,关节绕铰接Y轴方向的转动自由度,前臂绕关节的Y轴转动自由度[6]。基于此多自由度的结构设计,行走机构具有很强的灵活性和适应性。
4 结论
通过对行走机构的分支运动学分析,测得支撑臂末端的位置曲线和该分支的运动包络图,得到了该分支能达到位置空间,为机构进一步的设计及优化提供了依据。
[1] 张 熠.KAISER步行式挖掘机[J].工程机械与维修,2007(7):132.
[2] 赵志平,李新勇.虚拟样机技术及其应用与发展[J].机械研究与应用,2006,19(1):6-7.
[3] 吴卫国,朱学超,李高伟.基于Pro/E的工程机械试验平台的三维建模及运动仿真[J].煤矿机械,2007,12(28):99-101.
[4] 赵 武,刘祝英.4UX-550型马铃薯收获机悬挂机构仿真研究[J].农业机械技术设计与制造,2009(5):116-119.
[5] 齐 龙,马 旭,谭祖庭.基于Pro/E的复合式水田除草器设计与运动学仿真分析[J].吉林农业大学学报2011,33(4):455-458,468.
[6] 余顺年,马履中,陈扼西,等.三自由度并联机构位置和运动分析及仿真[J].农业机械,2005,36(5):97-100.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年4期)2020-12-25
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
时代农机(2016年6期)2016-12-01
环境科技(2015年4期)2015-11-08
有色金属设计(2015年2期)2015-02-28
