舰船空气压缩机气阀故障诊断装置设计与实现
2013-06-08 06:22孙团姜应战刘中冬姜海龙
船电技术 2013年1期
孙团,姜应战,刘中冬,姜海龙
(1. 海军潜艇学院,山东青岛266044;2. 青岛科技大学,山东青岛266061)
0 引言
舰船高压空气负责保障舰船主辅机的启动、控制,并为其它系统提供气源,而空气压缩机作为制造高压空气的辅助机械能否正常工作,关系重大[1]。空压机在运行过程中,气阀故障是引起空压机计划外停机的最主要原因。与空压机其他组件相比,气阀最为敏感,其好坏直接影响到空压机运转的经济性和可靠性,据统计,由于气阀故障造成压缩机停机的次数占其全部停机次数的50%以上[2]。
以舰船常用的某型空气压缩机为例,当气阀故障发生以后,就要判断故障气阀是六十多个气阀当中的哪一个或者哪几个。目前,舰船上普遍采用的办法是,利用人的听觉和触觉对空气压缩机故障气阀进行判断,这一方面对维修人员的维修技能和经验要求非常高,另一方面,即使具有优秀维修技能的人员,在六十多个气阀当中查找到故障气阀平均工时约为2~3小时。因此研制一套气阀故障诊断装置,对空气压缩机气阀检测与维修具有重要意义。对于空气压缩机气阀故障诊断方法研究[3],本文给出了一种基于频域分析的空气压缩机气阀故障诊断装置的设计方法,并进行了实际测试,测试结果表明频域分析对与气阀的故障诊断是有效的,这对于空压机气阀的故障诊断具有重要意义。
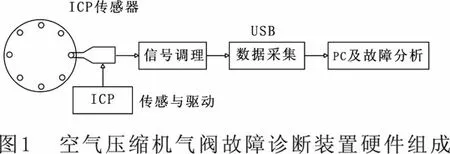
1 故障诊断装置硬件组成
故障诊断装置硬件组成如图1所示,ICP加速度传感器采集振动信号,经放大、滤波后,送至USB数据采集器,采集的时域信号送PC机,经应用软件分析,给出气阀的状态,从而达到气阀故障诊断的目的。
1.1 ICP加速度传感器
压电加速度传感器在振动与冲击测试中应用最为广泛,但由于压电传感器压敏元件具有很高的输出阻抗,需前置放大器放大成低输入阻抗的信号才能进行AD变换,若采用外置前置电压放大器,则由于其灵敏度受电缆分布电容的影响,输出信号将不能真实反映气阀的振动信息;若采用外置前置电荷放大器,其灵敏度受电缆分布电容的影响较小,但电缆受到振动和弯曲时,电缆芯线和绝缘体之间、绝缘体和金属屏蔽层之间由于相对移动摩擦产生静电荷,会造成电缆噪声,同样会导致输出信号将不能真实反映气阀的振动信息,最终给分析结果带来偏差。
ICP传感器是指内置集成电路的压电传感器,与外置前置放大器相比,可克服以上缺点。
1.2 ICP加速度传感器驱动电路
如图2所示,ICP传感器采用恒流源驱动,恒流源电路由电压基准LT1019通过运算放大器与三极管组成的V/I变换电路实现,设基准电压为Vref,则IE=Vref/Rs,适当选取Rs,可得到ICP传感器所需的驱动电流。
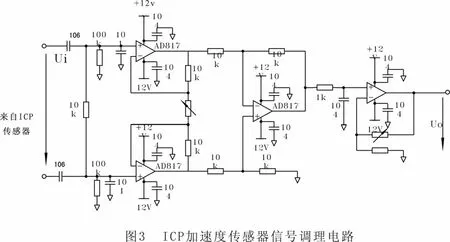
1.3 ICP加速度传感器信号调理电路

如图3所示,ICP传感器供电电缆同时作为振动信号输出线,由于振动信号为交变信号,因此通过交流耦合至AD817高速运算放大器组成的高阻抗仪表放大器进行电压放大。
为真实检测信号频谱,仪表放大器输出经抗混叠低通滤波器后输出至数据采集模块。
1.4 USB数据采集模块
为方便利用PC机MATLAB软件分析气阀状态,采用USB数据采集模块,本检测装置采用MPS系列USB数据采集模块,内置16位AD,采样频率高达400 K,采集到的数据可连续送到计算机,供MATLAB应用软件分析。
1.5 便携式计算机
便携式计算机用于开发和运行MATLAB应用软件,对气阀振动信号进行频谱分析,并建立气阀状态频谱数据库,对气阀状态进行分析和故障诊断。
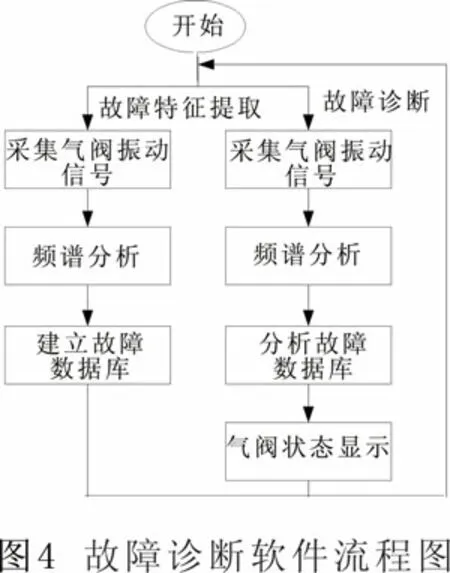
2 故障诊断装置软件设计
软件流程如图4所示,软件运行分为两个状态。一是特征提取状态,以大量的采集数据为依据,利用MATLAB信号处理模块为分析工具进行频谱分析,从而得到气阀的故障特征,建立故障数据库。二是故障诊断状态,在已建立故障数据库的基础上,通过计算机连续采集空压机气阀的振动信号,并进行频谱分析,再与故障数据库的故障特征进行相关分析,进行气阀的故障诊断。
3 测试结果与分析
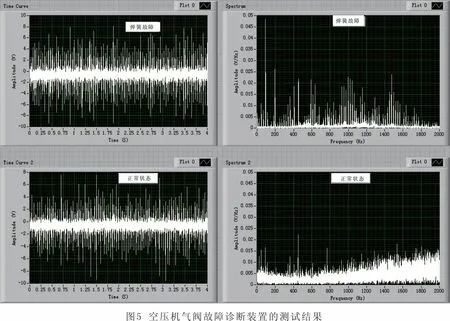
图5给出了空气压缩机气阀工作过程中的振动的时域及频域信号,其中图5a为时域振动信号,图5b为经过频域分析后的信号。由图5a与图5b对比可以看出:(1)气阀振动的时域信号在正常状态与故障状态下无明显特征;(2)经频域分析的气阀振动信号正常状态与故障状态下差异明显,其中正常状态下振动信号的频域分量较丰富,而故障状态下振动信号的频域分量单调,与正常状态下振动信号的频域分量相比差异明显。
4 结论
设计的基于频域分析的空气压缩机气阀故障诊断装置,通过样机的测试,结果表明该装置可实现舰船用空气压缩机气阀工作状态的监测和故障的快速诊断,提高了空气压缩机气阀检修工作的快速性。
[1] 高翔. 船舶辅助机械[M]. 北京:国防工业出版社,2005.
[2] 贺运初.H22氢氮压缩机气阀改造[J].流体机械,1999, (5):38-40.
[3] 高晶波,徐敏强,张嘉钟.2D12型往复压缩机气阀故障诊断方法[J].化工机械, 2003, 30(3):140-143.
[4] 吴广宇,郝点,石磊.往复压缩机气阀的振动测试分析[J].压缩机技术,2007, (5):23-25.
[5] 杨菲,苏永升.往复压缩机气阀故障诊断方法的试验研究[J]. 流体机械 2009, (6):7-9.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
雷达学报(2018年3期)2018-07-18
石油石化节能(2018年7期)2018-03-20
火控雷达技术(2016年1期)2016-02-06
合成技术及应用(2015年3期)2015-12-11
压缩机技术(2015年5期)2015-10-27
电测与仪表(2015年3期)2015-04-09
城市轨道交通研究(2015年3期)2015-02-27
凿岩机械气动工具(2014年4期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01