基于载波电流的无轴承电机无位移传感器研究
2013-06-07 07:15:30赵筱赫张锐宋海洋河南机电高等专科学校电气工程系河南新乡453000中国平煤神马集团河南平顶山467000
河南科技学院学报(自然科学版) 2013年2期
赵筱赫,张锐,宋海洋(.河南机电高等专科学校电气工程系,河南新乡453000;.中国平煤神马集团,河南平顶山467000)
基于载波电流的无轴承电机无位移传感器研究
赵筱赫1,张锐1,宋海洋2
(1.河南机电高等专科学校电气工程系,河南新乡453000;2.中国平煤神马集团,河南平顶山467000)
针对位移传感器的使用限制了悬浮传动系统微型化的发展,提出一种无需位移传感器的转子位移估算方案.高频载波电压加在电机电枢绕组上,载波电流随转子位置的变化而改变,通过对载波地电流信号的检测,确定转子位置.整个系统不需位置传感器,有效缩短电机的轴向长度,降低成本.分析了载波电流对电机运行的影响,综合各方面的影响,选取载波频率,并建立转子位置的数学模型.结果表明:基于载波电流的转子位置无传感测量能够有效检测转子位置.
无轴承电机;无传感;载波信号
磁悬浮传动系统具有无损耗、无摩擦、免润滑、超密封、寿命长等特点,被广泛应用于半导体业、制药业、化学工业等对传动系统有特殊要求的行业[1-3].无轴承电机集转子驱动与悬浮于一体.转子在磁力的作用下呈悬浮状态,与定子无机械接触.然而,无轴承电机上的磁悬浮一般需要位移传感器来检测转子位移.位移传感器的引入增大了电机轴向长度,使轴向刚度降低,同时传感器造价昂贵,影响无轴承电机在工业领域中的推广使用[4].为克服这些缺陷,本文设计一种基于载波电流的无传感转子位置检测系统.
1 动作原理
图1为典型的无轴承电机两个绕组的示意图.两组极对数相差为1的绕组嵌在定子槽内:四极绕组4a与4b,产生电机转矩;二极绕组2a与2b,控制径向悬浮[5-7].转子位置的变化会引起电机绕组与悬浮控制绕组之间互感的改变,需要建立互感的数学模型.

图1二极无轴承电机绕组Fig.1 motorwindingsof two-phasenon-bearing
图2 显示当转子中心偏离轨道中心时放大的气隙示意图.
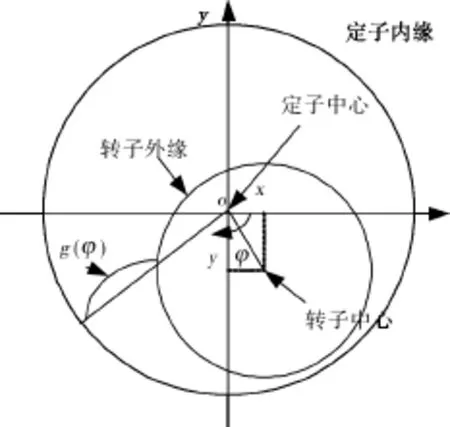
图2 转子偏移Fig.2 Rotordisplaced
实际气隙长度用g(φ)表示.

φ表示转子中心偏移角度,g0表示正常气隙长度,x、y分别表示转子位移的坐标分量.由于转子偏心距离很小,则有

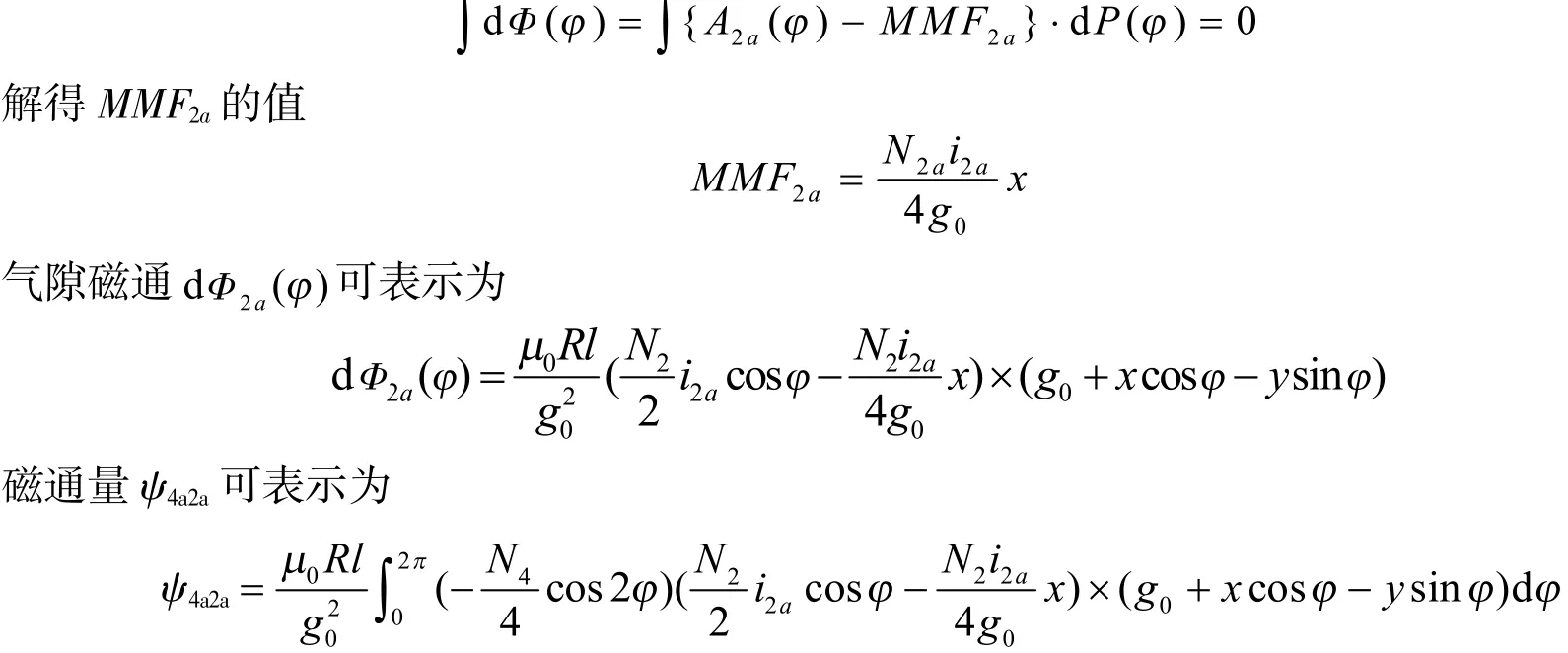
为了得到4a与2a绕组之间的互感,假设只有2a绕组中有电流时,MMF2a表示转子磁势,气隙磁通φ)全部在转子周围,根据高斯定理,总量应等于0.

令4a、4b、2a、2b绕组的端电压分别为:V4a,V4b,V2a,V2b.忽略绕组阻抗,电压和电流方程可以用4×4逆矩阵来表示

L4-c和L2-c分别表示四极绕组和二极绕组的自感.将式(1)式(2)代入式(3),可以得到二极绕组的电流I2a,I2b方程

在四极绕组电压上叠加一个载波电压Vc.将V4a=Vc和V4b=V2a=V2b=0代入式(4)得
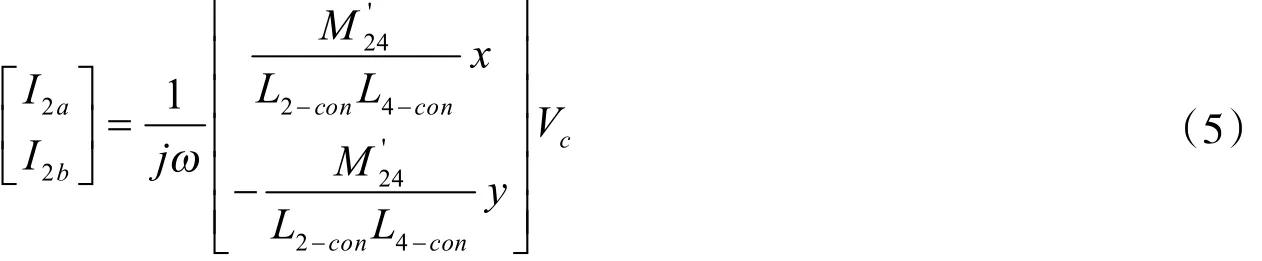
由式(5)可知,由载波电压产生的电流I2a,I2b分别与转子位移的x,y分量成比例.电流与转子x轴方向偏移成比例,其频率为载波频率,这样解调信号与转子在x轴方向位移成比例[8].同样,转子在y轴方向位移相应的由电流I2b得到.在一个无轴承电机的运行中,电压V4a,V4b,V2a,V2b并不为0,所以2a,2b绕组载波电流有两个分量:悬浮磁力电流和电机驱动力电流.理想情况下,载波信号的频率与这些电流成分相比越高越好,这样载波电流成分就可以单独测量.
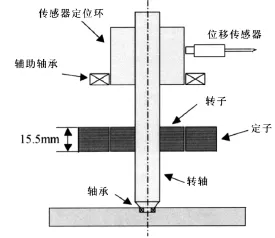
图3 典型电机结构Fig.3 structure ofa prototypemachine
2 载波频率的选定
图3为典型的电机结构,主轴底端由一个机械轴承支撑,这样,悬浮力可以对其进行二自由度调整.需要位移传感器检测转子的径向位移.
图4所示的测量互感是转子位移的函数.两套绕组的互感与转子位移成比例.当转子在沿x轴方向上有一个位移时,把5 kHz的电流I4a加在四极绕组之上,这样,可测到2a的开路电压V2a.互感M4a2a表示为

图4 转子位移与互感的线性关系Fig.4 linear relation between 4a and 2a windings
由图4可知,两绕组间的互感与转子径向位移成比例,比例系数记为称为悬浮力系数.由于硅钢片磁导率及其在高频下的磁损耗都与载波频率有关,所以该系数决于载波频率.图5为绕组4a与2a之间电压比率系数的频率特性.可以看出当频率很高时,会变小.所以,应该把载波频率设置得越小越好.结合上文分析,设置载波频率为5 kHz.
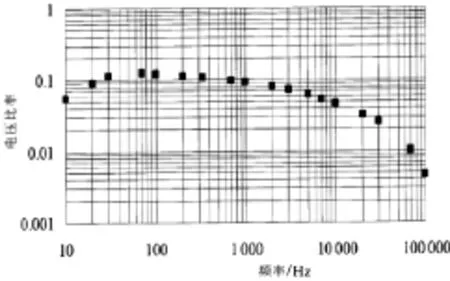
图5 电压比率的频率特性Fig.5 Frequency characteristic ofvoltage ratio
3 磁场悬浮实验
3.1 静止磁场中的悬浮实验

图6 静止磁场中传感器输出与计算位移Fig.6 Sensoroutputand estimated displacementin staticmagnetic field
3.2 旋转磁场中的悬浮实验
如图7所示,电机绕组通入交流电流,在转速为1 500 r/m时,传感器输出与电流估算器的位移计算值.计算位移ˆ作为位移反馈信号.计算结果与传感器有很好的一致.由于辅助轴承与转子之间的气隙长度为200μm,所以可以确定转轴径向已完全悬浮.这样无传感的计算位移在电机控制精度范围内,满足控制要求.
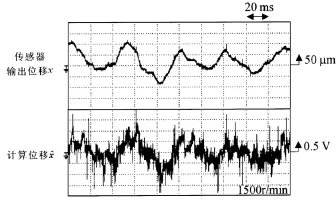
图7 旋转磁场中的传感器输出与计算位移Fig.7 Sensoroutputand estimated displacementin rotatingmagnetic field
4 结论
本文研究的基于基于载波电流的转子位移计算方法,在无轴承电机控制中可以替代位移传感器使用,能够满足控制精度的要求,使试验样机稳定悬浮.有效减小了无轴承电机的转轴长度,降低成本,增加轴向刚度,改善其运行性能,对无轴承电机的发展具有重大意义.
[1]朱熀秋.磁悬浮电机基础理论和实验研究[D].镇江:江苏大学,2001.
[2]王晓琳,邓智泉,严仰光.一种新型的五自由度磁悬浮电机[J].南京航空航天大学学报,2004,36(2):210-214.
[3]Yang Y,Deng ZQ,Zhang QY,et al.Stator vibration analysisofbearingless switched reluctancemotors[C].Nanjing:Electricaland ControlEngineering,2010:1993-1996.
[4]王晓琳,邓智泉,张红荃,等.无轴承异步电机的设计与实现[J].航空学报,2003,24(3):259-262.
[5]Ooshima M,Chiba A,Fukao T.Characteristics ofa permanentmagnet type bearinglessmotor[J].IEEE Trans.Indus.Application, 1996,32(2):363-370.
[6]Suzuki T,Chiba A,Rahman M A,et al.An air-gap flux oriented vector controller for stable operation of bearingless induction motors[J].IEEETrans.Industry Application,2000,36(4):1069-1076.
[7]Chiba A,Power D T,Rahman M A.Analysis ofno-load characteristics ofa bearingless inductionmotor[J].IEEE Trans.Industry Application,1995,31(1):77-83.
[8]Hachiya T,Ebara K,Chiba A,et al.A self-sensing bearinglessmotor driven by a general-purpose inverter[C].Fukuoka:in Proc. 7th Int.Symp.Magnetic Suspension Technology,2003:44-49.
(责任编辑:卢奇)
Performances of bearingless and sensorlessmotor drive based on carrier injection
Zhao Xiaohe1,Zhang Rui1,Song Haiyang2
(1.Henan Mechanicaland Electrical Engineering College,Xinxiang453000,China;2.China Pingmei ShenmaGroup,Pingdingshan 467000,China)
A self-sensing non-bearingmotor is considered as an effective solution to reduce costand shorten a shaft length.A novel estimation method of a rotor displacement is proposed.Based on the detection of currents induced by mutual inductances,a high-frequency carrier voltage is superimposed on amotormain terminal voltage.The induced carrier-frequency current component is distinguished from the suspension-winding current.The carrier signal is selected.It is shown that a successfulmagnetic suspension is realized with the proposed method.
non-bearingmotors;non-sensor;carrier injection
TM352
A
1008-7516(2013)02-0075-05
10.3969/j.issn.1008-7516.2013.02.018
2013-03-13
赵筱赫(1983-),女,河南平顶山人,硕士,助教.主要从事磁悬浮电机传动系统的设计与实现研究.
猜你喜欢
电力系统自动化(2021年18期)2021-09-25 07:34:28
湖南电力(2021年2期)2021-05-08 06:31:18
电子制作(2017年1期)2017-05-17 03:54:12
中学物理·高中(2016年12期)2017-04-22 10:23:37
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
西部广播电视(2015年10期)2016-01-18 04:01:45
云南电力技术(2015年2期)2015-08-23 01:31:52
电测与仪表(2014年15期)2014-04-04 12:05:32
河南科技(2014年24期)2014-02-27 14:19:37