基于TMS320F2812的无传感器无刷直流电机控制器设计
2013-06-06 04:33傅惠南
机电工程技术 2013年6期
徐 宇,傅惠南,刘 凯
(广东工业大学机电工程学院,广东广州 510006)
0 引言
无刷直流电机是近年来随着电子技术的迅速发展而涌现出的一种新型直流伺服电机。无刷直流电机以电子换向器代替机械换向而实现直流电机的换相,既具备交流电动机的结构简单、运行可靠等优点,又具备直流电动机的运行效率高、调速性能好等优点[1]。对于无传感器无刷直流电机的控制,有些采用单片机加专用控制芯片来控制,虽降低了控制的复杂性和控制系统的成本,但单片机的指令功能不强,数据转换速度慢,尤其是对于无位置传感器的无刷电机,还需检测电机实时转子位置,使得它在运行速度和控制精度上往往无法达到要求。DSP 是一种高速信号处理芯片,其对电机的控制原理和单片机一样,但DSP 拥有强大的运算能力,能使用一些先进的控制策略,从而提高控制器和电机的性能。本文采用TMS320F2812 处理器为中心,搭建了无刷电机的双闭环(电流、速度)数字化控制平台。
1 控制系统总体设计
控制系统原理如图1 所示。主要由功率放大与光耦隔离电路、无刷直流电机、反电势过零检测电路、相电流检测电路、驱动逆变电路、保护电路和以TMS320F2812 为核心的控制器等7 部分组成。TMS320F2812 芯片具有较高的信号处理速度以及较强的运算能力,可以实现无刷电机高精度、高效率的全数字化控制[2]。

图1 系统总体设计
该控制器采用了PWM调试方式实现对无刷直流电机的控制。其中DSP的6路PWM输出端口经光耦隔离电路进行强弱电隔离,再经驱动芯片驱动六个功率场效应管,从而实现三相无刷直流电机的驱动与控制。其中,电流检测形成负反馈,还通过检测无刷直流电机端电压估算转子实时位置和相应的转速。因此可以对电机进行速度环和电流环的两闭环控制。
2 系统的硬件设计
2.1 光耦隔离与功率放大电路
由于TMS320LF2812 DSP 芯片输出的6 路PWM信号为3.3V而不足以驱动功率管的通断。因此在控制信号和功率管之间加入功率放大电路,本系统采用驱动芯片IR2106来实现功率放大,其中IR2106是专用的半桥驱动芯片,可输出两路输出脉冲,驱动延时信号为ns 级,开关频率在20kHz 以上,能够产生10~20V 的驱动信号,符合功率驱动电路的要求。此外出于安全考虑,采用光耦使控制部分和功率部分隔离,有利于对控制器提供保护和减少干扰。
如图2 所示,在图2 中由控制器发出的两路PWM 脉冲信号经反相器74HC04 反相后经高速光耦隔离器件6N137,实现强弱电隔离,再经反相器反相从而得到和控制器发出的相同的波形信号。然后,该信号分别输入到IR2106 的HIN 和LIN 引脚,根据IR2106 芯片的驱动输出规则得到15VPWM 电压信号,故足以驱动全桥电路功率管的通断。
2.2 逆变主电路与端电压检测电路

图2 光耦隔离与功率驱动电路

图3 逆变电路与端电压检测电路
本系统主功率电路采用三相全桥逆变电路,主功率开关器件采用东芝公司的MOSFET K2544。K2544拥有较快的开关速度,且其内部集成有反向快速恢复二极管,可以对MOS管起保护作用而不用外接。六个MOSFET K2544 按一定的顺序通断将直流电逆变为交流电提供给三相无刷直流电动机的定子绕组。
本文中无刷直流电机内部没有位置传感器,故采用反电动势过零检测法来判断转子换相时刻[3]。通过对电机三相端电压的检测来判断反电动势过零时刻从而再延长30°电角度到达换相时刻。由于直接检测A、B、C相端电压时,发现端电压波动非常大,不利于信号采集和分析处理,且端电压幅值较大无法直接连接于DSP 的A/D 转换端口,故采用分压滤波处理。电路如图3所示。
2.3 相电流检测电路
相电流检测通常采用电阻采样、霍尔电流检测器采样以及电流互感器采样三种方式[4]。由于霍尔电流检测器采样方式精度较高,故本系统采用南京中霍传感科技有限公司的霍尔传感器TBC25C04 对电机相电流进行采样。TBC25C04 为多量程的电流传感器,基于磁补偿原理,可用于测量直流、交流或脉动电流。该电流传感器具有高精度、温漂小、响应快等优点,且还可以通过初级引脚的连接方式获得不同的放大倍数。
由于DSP 的A/D 端口的输入电压范围为0~3.3 V。故电流采样电路的输出信号不能直接连接于DSP的A/D端口,必须对TBC25C04的输出电流调理后才能输入到其A/D 端口。其中调理电路主要包括电压跟随和电压提升。如图4 所示,TBC25C04的输出电流信号OUT经过一个100 Ω 采样电阻后±25 mA的输出信号转换为±2.5 V的电压信号。然后经过一个RC 滤波再由运放TL084 构成的电压跟随及电压提升电路将电压信号转换为0~3 V。
2.4 过流过压保护电路
为了出现故障时可以保护各个部件,系统还配备了保护电路。它主要包括过流保护、过压欠压保护电路。如图5 所示,电流信号通过R1电阻的采样再经过滤波进入比较器LM324 的负输入端。若流过R1的电流大于设定值,则此电压会大于5 V 从而输出低电平。如当R1=5 Ω 时,限流电流为:Iout=5V/5Ω=1A。

3 系统的软件设计
本控制系统的主程序流程图如图6 所示,主要包括系统初始化、三段式起动、自同步运行程序。其中,三段式起动包括转子预定位、外同步加速和自同步切换三个阶段[5-7]。自同步运行程序包括位置信号提取,转速估算,换相逻辑判断以及速度电流闭环控制。
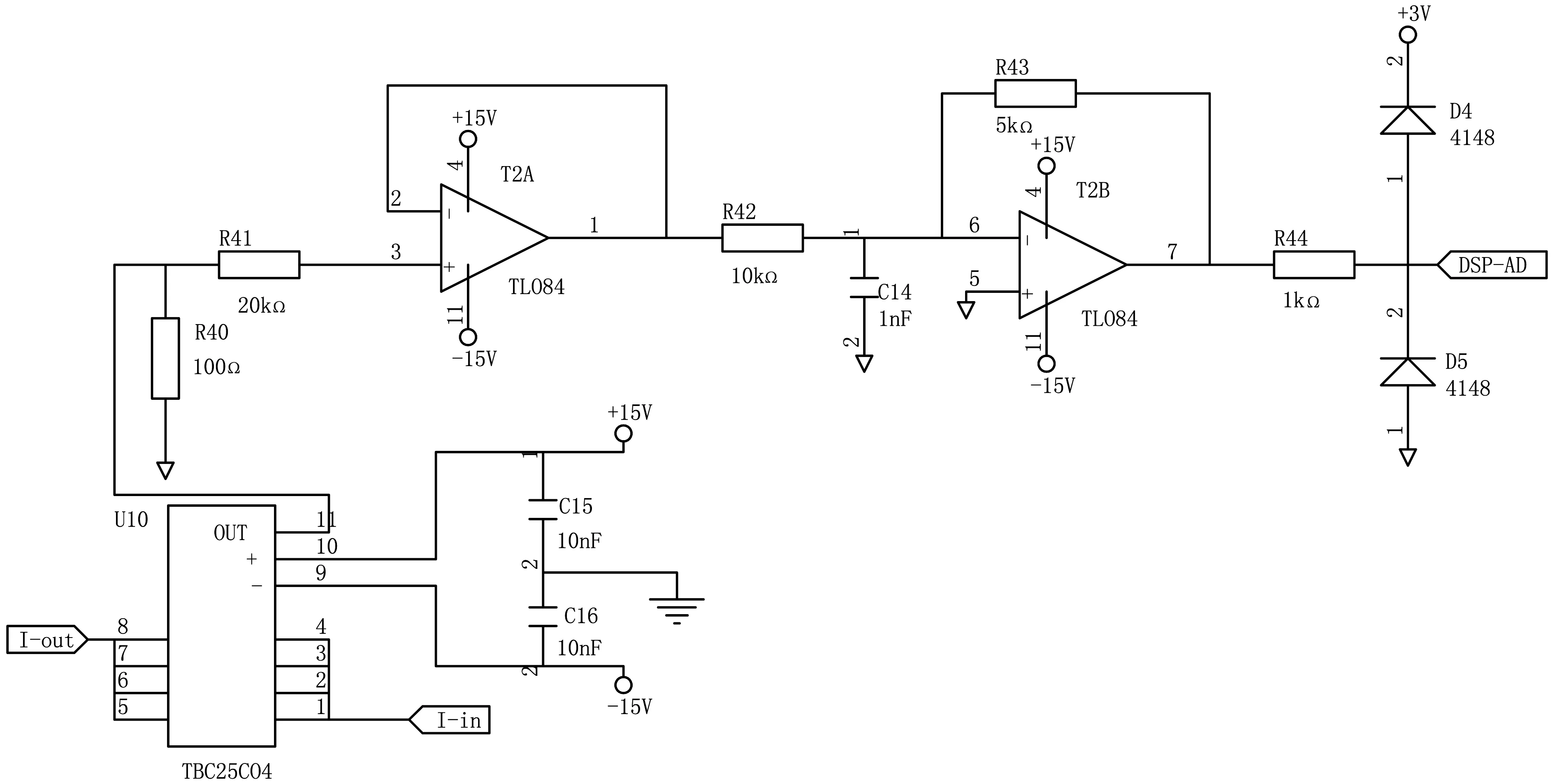
图4 相电流检测电路
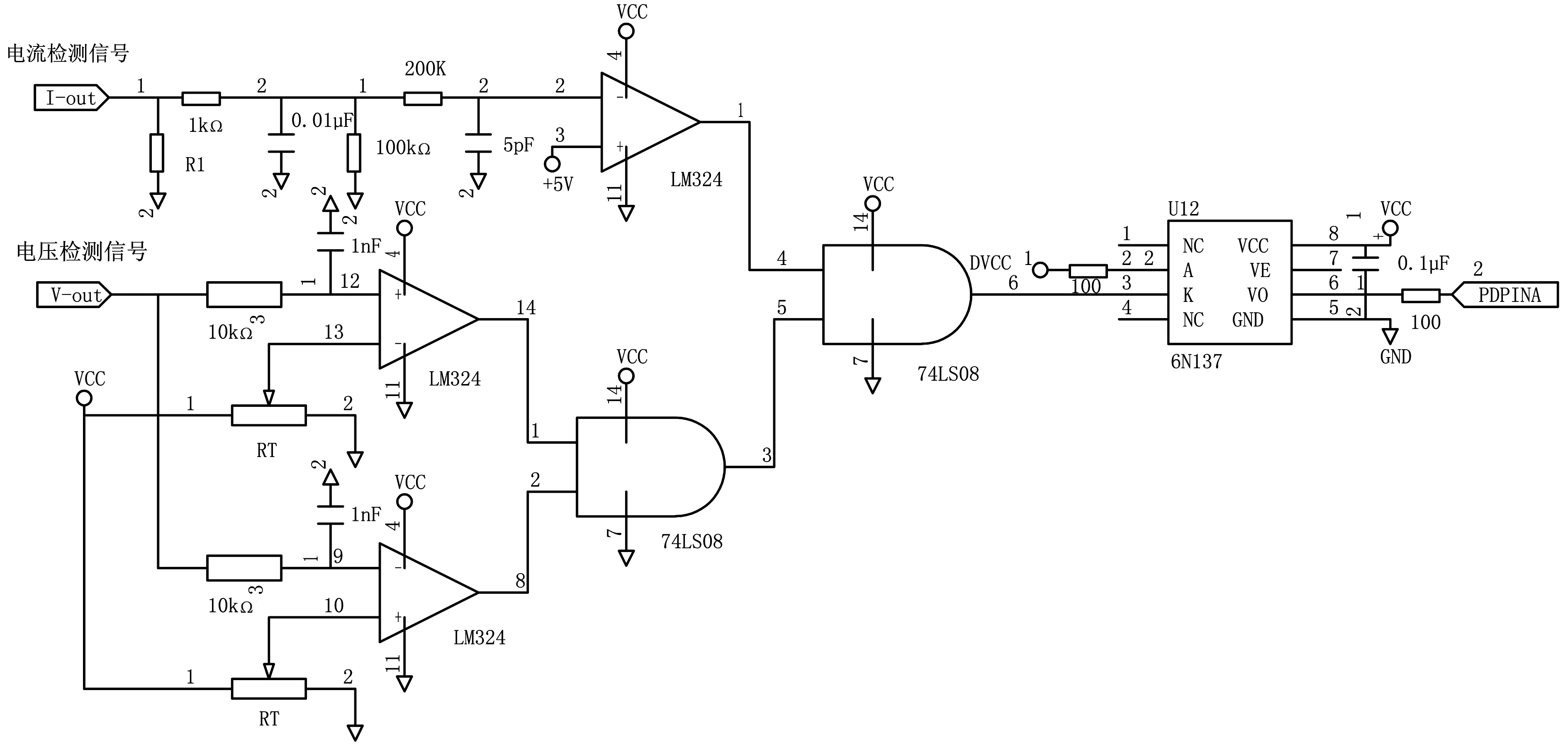
图5 保护电路

图6 主程序流程图
4 实验结果
本文以电脑硬盘上的主轴无刷直流电机为实验对象,采用H_PWM-L_ON 的PWM 单边调制方式。图7、图8及图9分别表示控制器的功率管桥臂驱动信号、分压滤波后端电压信号和电机端电压信号。由图7 中可以看出,驱动电压波形平整有利于对驱动桥的驱动和保护。由图9 中可以看出,电机端电压波动较大,但经过分压滤波后如图8 所示,波形干扰较小,且幅值控制在1 V 以内,有利于控制器的信号采集与分析,系统运行稳定,满足设计要求。

图7 A相上、下桥臂驱动信号
5 结束语
本文所设计的控制方案实现了无位置传感器无刷直流电机的双闭环控制方式,利用端电压获取转子位置信号及对转速的估算,并利用电流传感器得出较高精度的电流信号用于二次转速估算及调整,使得此系统具有较高的灵敏度和可靠性。此外,若对该系统软件部分进行适当修改可实现一些更先进的控制策略,如模糊控制,以达到更高的控制精度。

图8 A、B相分压滤波后端电压信号

图9 A、B相端电压信号
[1]李烨.永磁无刷电动机技术发展水平及应用前景[J].微电机,2001,34(1):31-33.
[2]韩安太.DSP 控制器原理及其在控制系统中的应用[M].北京:清华大学出版社,2003.
[3]冼峰峰,周顺荣.无刷直流电动机无位置传感器驱动系统[J].微特电机,2004(1):31-32.
[4]王磊,莫鸿强.一种“反电动势法”永磁无刷直流电机控制器设计[J].科学技术与工程,2010,10(13):3088-3089.
[5]许鹏,曹建波.无位置传感器无刷直流电机软件启动[J].电机与控制学报,2009,13(5):375-376.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
水电站机电技术(2017年9期)2017-09-26
电子制作(2017年1期)2017-05-17
微特电机(2016年3期)2016-11-29
通信电源技术(2016年1期)2016-04-16
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01