雷达导引头视线角速度半实物仿真
2013-06-05 13:29张江华磨国瑞
火控雷达技术 2013年1期
崔 念 张江华 磨国瑞 荆 涛
(西安电子工程研究所 西安 710100)
1 引言
大型复杂武器系统的研制中,因条件限制不能进行大量的直接试验,常通过仿真尤其是半实物仿真对系统设计作有效的检验。早期检验导弹武器性能的方法主要是采用飞行试验来考核,而考核后又无法回收,因此导弹的半实物仿真就显得尤为重要[1]。另一方面,由于半实物仿真弥补了数字仿真与外场试验之间的空档。它避开了全数字仿真的复杂性和不确定性,提高了仿真的精度和结果的可靠性。同时又具有安全、高效、经济和可重复使用的特点。所以,一些发达国家在武器的定型试验过程中,也都采用半实物仿真技术对整个武器系统及其主要部件进行试验和测试[2]。半实物仿真技术的采用,大大推进了导弹武器系统的研制,减小了开销,在导弹研制中起着越来越重要的作用。
比例导引律由于自身的高效性和易于实现性被大量地应用于各种导弹的末制导段,而比例导引律的核心即为导弹和目标的视线角速度与控制导弹的指令加速度的大小成比例。因此,弹目视线角速度是比例导引精确末制导导引头提供的主要制导信息。研究精确末制导雷达导引头视线角速度的半实物仿真方法,对提高雷达导引头的研制具有重要的意义。
2 综合视线法原理
2001年,美国红石武器中心的Jerry A.Ray等人提出了综合视线法[3]的概念,即利用转台运动模拟弹目相对运动,模拟的视场角范围实际上仅受限于转台转动范围,没有必要象阵列式仿真系统那样,要求暗室的宽度和高度必须足够大,从而也可以大大减小仿真系统的成本。综合视线法与真实视线法进行半实物仿真的对比见图1。
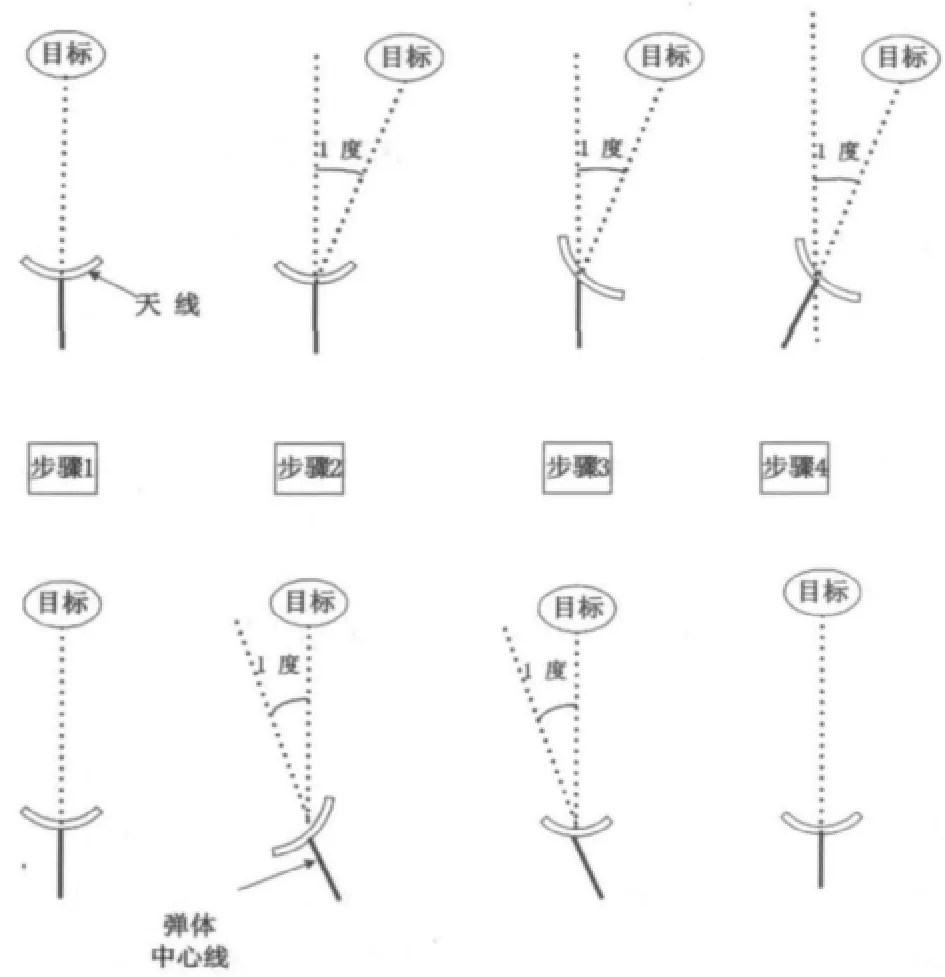
图1 综合视线法与真实视线法对比
图1中上半部分是真实视线法,目标相对导引头运动1度,首先是天线转动1度跟踪上目标然后再调整弹体姿态,使目标位于弹轴正前方;而在综合视线法中为了模拟目标相对导引头1度的角度变化,首先向相反方向转动转台1度,然后天线再产生1度的角度调整,接着调整弹体的姿态,从而使弹轴对准目标。
然而,在综合视线法的实现过程中,转动转台使目标偏离弹轴方向,对于采用稳定平台的导引头来说,由于稳定平台的存在会自动克服转台转动影响,使天线指向在转台转动过程中保持不变,无法使导引头象真实视线法那样输出视线角速度变化。因此,在对具有稳定平台的导引头视线角速度输出采用综合视线法进行仿真时,需要对导引头速度环进行补偿以消除稳定回路对模拟目标运动指令的隔离影响,补偿后的simulink仿真结果如图2所示。
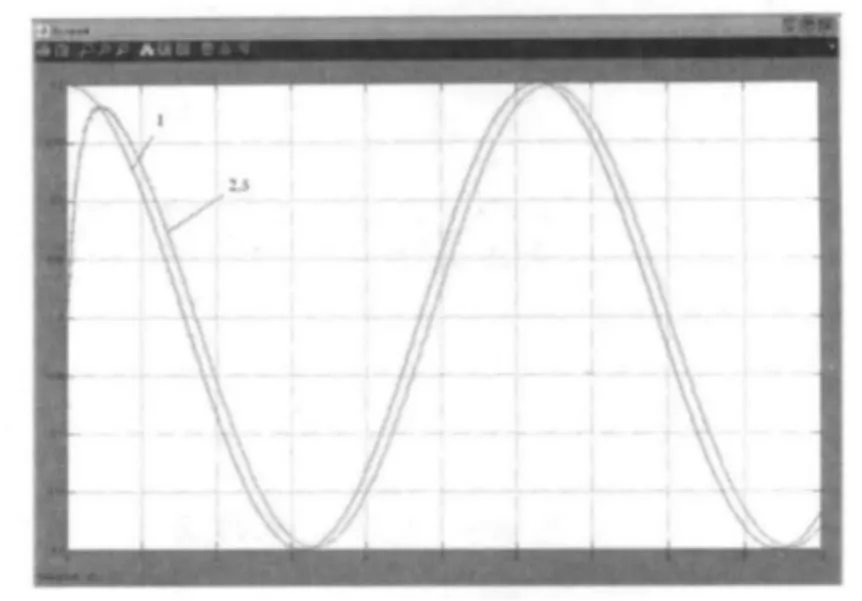
图2 视线角速度输出对比
图中曲线1为理想视线角速度,曲线2、3为综合视线法与真实视线法的视线角速度输出,可见综合视线法替代真实视线法具有高度逼真性,能够满足实际使用。
3 半实物仿真验证系统组成
本文采用的是一种低成本雷达导引头半实物仿真系统[4]。该系统避免了采用微波暗室和目标模拟阵列,因而大幅度降低了仿真系统的建设成本。如图3所示。
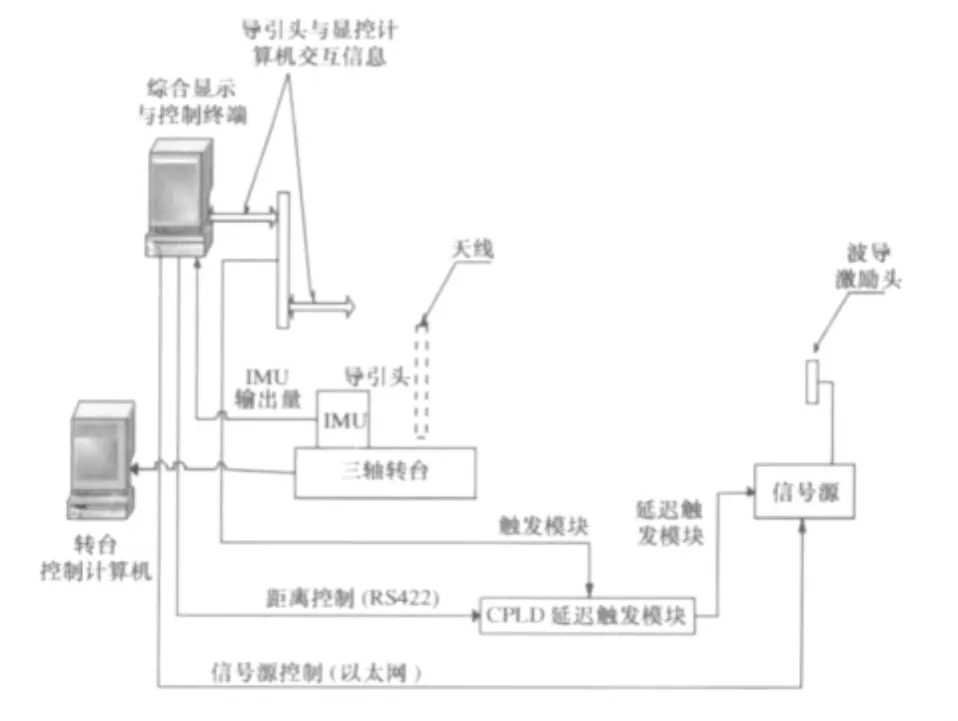
图3 半实物仿真验证系统组成
在雷达导引头发射关闭的状态下,综合显控计算机按导引头当前的工作模式,通过网络实时调用信号源与之相应的波形文件。同时实时控制CPLD延时触发模块,对输入给信号源的触发脉冲进行延时,进而模拟目标距离由远及近的变化。也就是说当矢量信号源接收到CPLD模块延时以后的发射触发信号后,就通过波导激励头向外辐射模拟目标回波来完成导引头目标跟踪的闭环。
图4 综合显示与控制终端软件
根据综合视线法原理,首先通过综合显示与控制终端计算机的相应控制,来完成雷达导引头对模拟目标的搜索、截获和跟踪功能。在跟踪状态下,综合显控计算机实时显示并记录所跟踪目标的距离、速度、角度、角速度等相关信息。固联于转台的惯性测量单元(IMU)实时敏感转台方位、俯仰方向的角速度信息,并实时上报给显控计算机。同时,显控终端软件将惯性测量单元(IMU)送来的转台角速度信息实时发给雷达导引头的伺服控制机构,用以补偿伺服稳定平台对转台转动运动的隔离影响。这样就可以通过转台的运动来模拟导弹和目标之间的相对运动,实现和目标运动相同的视线角速度仿真。
4 半实物仿真系统的实验结果
分别在雷达导引头置位方式、跟踪方式以及跟踪时对转台运动的补偿方式下,对转台施加一随机干扰运动,用来模拟导弹的弹体扰动,所获得的转台角速度输出和雷达导引头角速度输出如图5~7所示。
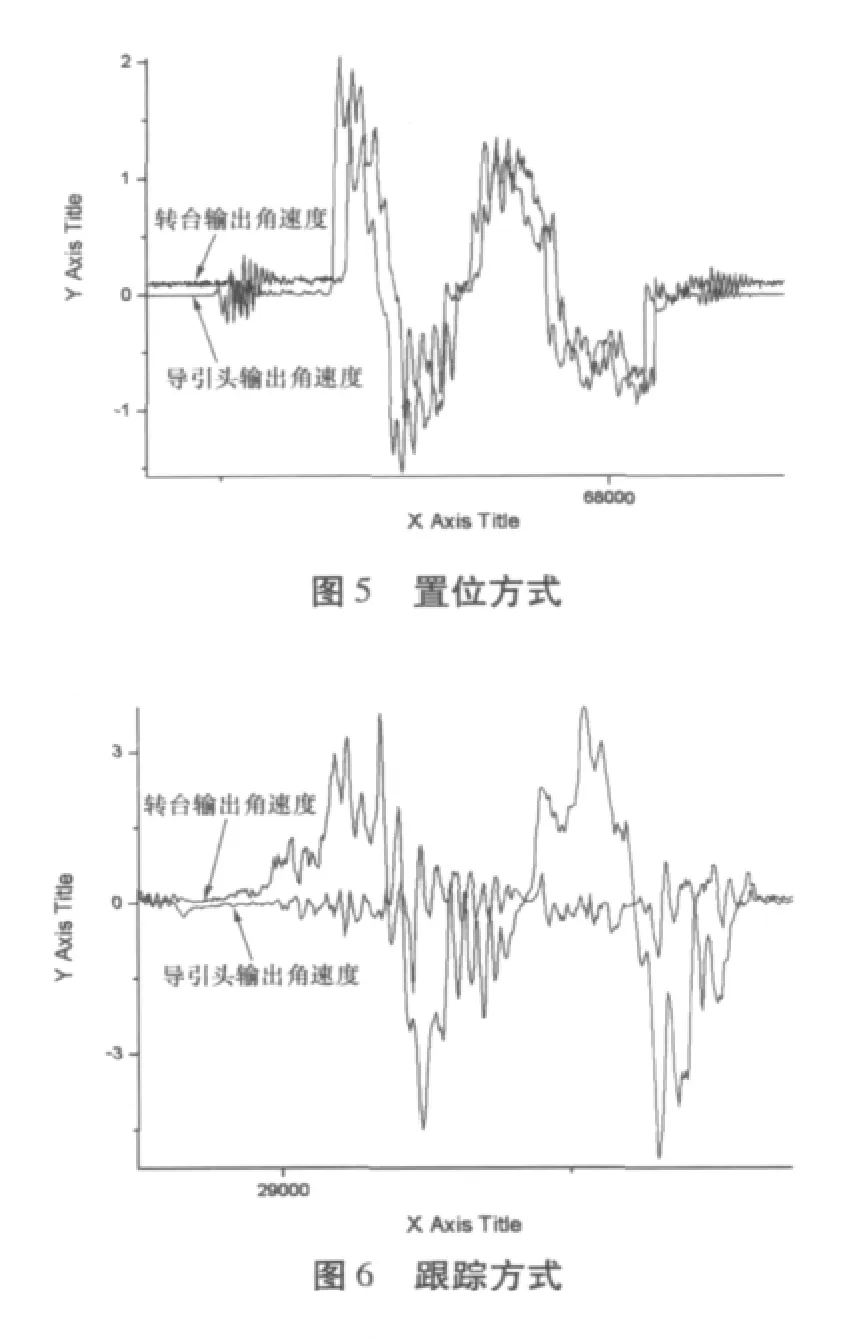

图7 弹体扰动下跟踪补偿方式
当雷达导引头工作在置位模式时,导引头中的伺服系统天线与转台相固联,不会隔离转台的随机扰动。此时,雷达导引头的伺服天线将随着转台的运动而运动。因此,如图5所示,所获得的转台输出角速度与导引头的输出角速度基本一致。
当雷达导引头工作在跟踪模式时,由于导引头中的伺服陀螺稳定平台系统对转台的运动起着隔离的作用。因此,转台的随机扰动被伺服稳定平台隔离掉,导致雷达导引头输出的实际视线角速度远小于转台转动输出的视线角速度,如图6所示。
当雷达导引头工作在跟踪补偿模式时,仿真系统将惯性测量单元(IMU)所敏感的转台姿态信息反馈给雷达导引头的伺服控制系统。用以补偿在跟踪模式下,伺服陀螺稳定平台对转台运动的隔离。因此,可以获得雷达导引头在跟踪补偿模式下的转台角速度输出与导引头视线角速度输出如图7所示。可以看出,两种输出角速度除仅符号相反外,基本一致。
在雷达导引头跟踪补偿方式下,为了获得期望的目标视线角速度输出,对转台施加方向与期望目标运动方向相反的近似正弦运动,用以模拟导弹和目标的相对运动。所获得的转台角速度输出和雷达导引头角速度输出如图8所示。
从图8可以看出,在跟踪补偿方式下对转台运动隔离补偿后,可以实现通过转台运动来模拟导弹和目标的相对运动。

图8 弹体近似正弦运动跟踪补偿方式
5 结论
从雷达导引头工作在跟踪补偿模式下的转台角速度输出与导引头视线角速度输出曲线比较可得,利用转台运动来模拟导弹和目标相对运动的雷达导引头视线角速度输出方法可行,且模拟的视场角范围仅受限于转台的转动范围。在用该方法来模拟导弹和目标的相对运动时,目标保持不动,使转台按照模拟目标运动的相反方向运动,即可获得所期望的目标运动视线角速度输出。
[1]曾嫦娥,鱼明哲,单长胜,付静,黄艳俊.美陆军制导武器试验半实物仿真技术综述[J].飞行器测控学报,2004,24(3):75 -83.
[2]安丰增,吴兆欣,王海峰等.雷达型空空导弹半实物仿真系统方案[J].航空兵器,2004,(3):38-40.
[3]Jerry A.Ray,et al.Hardware-in-the-loop Support of the Longbow/Hellfire Modular Missile Systems Pre-Planned Product Improvement Program[C].(4366)SPIE,2001,519 ~527.
[4]习远望,张江华,高文冀,刘逸平.雷达导引头低成本半实物仿真系统的应用[J].火控雷达技术,2010,39(1):11 -15.
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
青年文学家(2020年22期)2020-08-31
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
当代贵州(2015年19期)2015-06-13
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11