
基于模糊控制策略的PHEV仿真研究
2013-06-02 08:02邹发明王文宾
重庆交通大学学报(自然科学版) 2013年2期
李 军,邹发明,涂 雄,刘 彪,王文宾
(重庆交通大学机电与汽车工程学院,重庆 400074)
基于模糊控制策略的PHEV仿真研究
李 军,邹发明,涂 雄,刘 彪,王文宾
(重庆交通大学机电与汽车工程学院,重庆 400074)
针对并联式混合动力汽车,在电辅控制策略的基础上设计一种基于模糊逻辑推理的动力分配控制策略。将其模型嵌入仿真软件ADVISOR中,在CYC_EUDC循环道路工况下进行仿真计算。仿真结果表明:与电辅控制策略相比,采用模糊逻辑控制策略的混合动力电动汽车具有较好的经济性、排放性、鲁棒性,能够使发动机尽量集中工作在优化工作曲线附近,并保证电池SOC在较小的范围内变化。
并联式混合动力汽车;模糊逻辑控制;仿真
0 引言
混合动力电动汽车被认为是目前应对环境和能源问题的最主要对策和最现实的选择之一,在全世界范围内得到大力发展。混合动力电动汽车的特点是燃油发动机动力与电动机动力两种动力的组合,可以通过合理的控制策略使其获得良好的燃油经济性和排放性。
根据混合动力电动汽车动力源的数量以及动力系统结构型式的不同,HEV可分为串联式、并联式以及混联式[1]。并联式混合动力汽车采用发动机和电动机两套独立的驱动系统驱动车轮,发动机和电动机可以分别独立地向汽车提供动力,在需要大功率时可用发动机和蓄电池共同提供动力。汽车的需求转矩Trq为发动机输出扭矩Te和电动机输出扭矩Tm之和,Te,Tm之间相互独立,如图1。

图1 并联式混合动力汽车简图Fig.1 Diagram of parallel hybrid electric vehicle
1 模糊逻辑控制策略研究
1.1 混合动力汽车的控制目标
在保证PHEV动力性能的前提下,把动力传动系的需求扭矩合理分配给发动机和电动机,尽量使发动机工作在省油区。通过调节发动机工作点,使发动机工作点围绕优化曲线波动,同时设定电池电量状态的上限值SOChi和下限值SOClo,使电池SOC值保持在一定的范围内以延长电池的使用寿命和提高电池的充放电效率。
1.2 模糊逻辑控制策略
以并联式混合动力电动汽车为研究对象,用MTALAB/Simulink软件建立模糊逻辑控制策略仿真模型,并在ADVISOR平台上对建立的模型进行仿真分析[2]。
模糊逻辑控制策略是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程,其鲁棒性和适应性较好,不依赖于被控对象精确数学模型[3],比较适用于PHEV的动力系统控制建模。设计模糊逻辑控制策略目的在于保证整车的动力性能、满足排放法规要求的前提下,兼顾发动机燃油经济性和蓄电池充放电效率,实现蓄电池充放电的平衡。其控制系统结构示意如图2。

图2 控制系统结构示意Fig.2 Structure schematic drawing of control system
模糊逻辑控制系统的输入为需求转矩Trq与最优转矩Top之差即ΔT、蓄电池SOC值,输出是参数r,其与最优转矩相乘得到发动机输出转矩Te,电动机输出转矩Tm通过Trq和Te之间的差值得到。发动机燃油优化工作曲线(Top曲线,见图3)是从发动机的万有特性曲线出发,将一定发动机转速和一定负荷发动机的最低燃油消耗点连成一条线,也就是静态工作条件下发动机的最佳燃油工作曲线[4]。
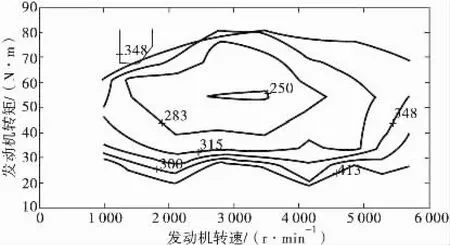
图3 发动机优化工作曲线Fig.3 Optimization work curve of engine
1.3 模糊逻辑控制器的设计
利用MATLAB模糊逻辑工具箱设计模糊逻辑控制器,其步骤包括定义输入输出模糊集、定义输入输出隶属函数和编辑建立模糊控制规则等[5],然后将设计好的模糊控制器模型嵌入到ADVISOR软件中集成进行仿真。模糊控制规则是模糊控制器的核心,构成了描述众多被控过程的模糊模型。
制定模糊控制规则的原则是尽量使发动机工作在燃油优化工作曲线附近,以保证整车的燃油经济性和排放性能[6-7]。模糊控制器的输入量是汽车需求转矩Trq与最优转矩Top之差即 ΔT、蓄电池 SOC值,输出是参数r。
在编辑模糊规则之前,应先对输入变量进行模糊化编辑,分别将转矩差ΔT分成5个模糊子集:{负大,负小,零,正小,正大},其论域确定为[-50 50],根据SOC的范围把电池SOC值也分成5个模糊子集为:{过低,偏低,适中,偏高,过高},论域确定为:[0.2,1.0],参数r的值域为{0.8,0.85,0.9,0.95,1.0,1.05,1.1,1.15,1.2},输入变量 ΔT和蓄电池SOC分别采用三角形和梯形的隶属函数。模糊控制器输入变量ΔT、SOC的隶属函数如图4、图5。

图4 输入变量ΔT隶属函数Fig.4 Membership function of input variables ΔT

图5 输入变量SOC隶属函数Fig.5 Membership function of input variables SOC
模糊推理方法采用Sugeno型[8],其输出量不是模糊量而是确定的参数值,模糊控制器的其中部分控制规则如下:
1)if{需求转矩与最优转矩之差ΔTis负大}and{蓄电池SOC is过低}then{发动机输出转矩参数ris 1};
2)if{需求转矩与最优转矩之差ΔTis负大}and{蓄电池SOC is偏低}then{发动机输出转矩参数ris 0.9};
3)if{需求转矩与最优转矩之差ΔTis负小}and{蓄电池SOC is过低}then{发动机输出转矩参数ris 1.05};
4)if{需求转矩与最优转矩之差ΔTis负小}and{蓄电池SOC is偏低}then{发动机输出转矩参数ris 1};
5)if{需求转矩与最优转矩之差ΔTis零}and{蓄电池SOC is偏低}then{发动机输出转矩参数ris 1.05};
6)if{需求转矩与最优转矩之差ΔTis零}and{蓄电池SOC is适中}then{发动机输出转矩参数ris 1};
7)if{需求转矩与最优转矩之差ΔTis零}and{蓄电池SOC is过高}then{发动机输出转矩参数ris 0.85};
8)if{需求转矩与最优转矩之差ΔTis正大}and{蓄电池SOC is过低}then{发动机输出转矩参数ris 1.2};
9)if{需求转矩与最优转矩之差ΔTis正小}and{蓄电池SOC is过低}then{发动机输出转矩参数ris 1.15}
10)if{需求转矩与最优转矩之差ΔTis正大}and{蓄电池SOC is偏低}then{发动机输出转矩参数ris 1.15}
2 模糊控制策略的仿真
在基于MATLAB/Simulink环境的混合动力电动汽车仿真软件ADVISOR中进行PHEV模糊逻辑控制策略的仿真。ADVISOR软件具有快速的反向仿真和精确的正向仿真两种模式,它由路面工况、发动机、电动机、蓄电池等模块构成,图6模块中的箭头表示仿真数据和能量的流向,每一个模块都传递、变换要求的转矩,也同时传递、变换可达到的和实际的转矩、车速。用户可以先用Simulink搭建自己的PHEV仿真模型,然后替换ADVISOR中原有的模块,用户甚至可以在此基础上对ADVISOR进行二次开发。在Simulink中搭建的并联式混合动力电动汽车顶层模型见图6。模糊逻辑控制器simulink仿真模型如图7。最左边的输入量为来自离合器模块的需求转矩Trq和需求转速nrq,最右边的输出流向发动机模块。
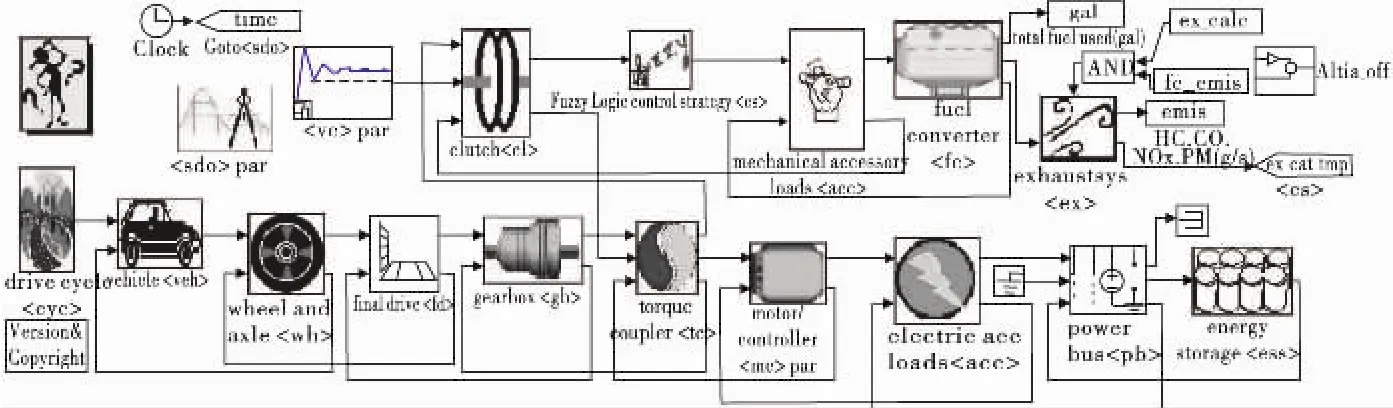
图6 PHEV的仿真模型Fig.6 Simulation model of PHEV
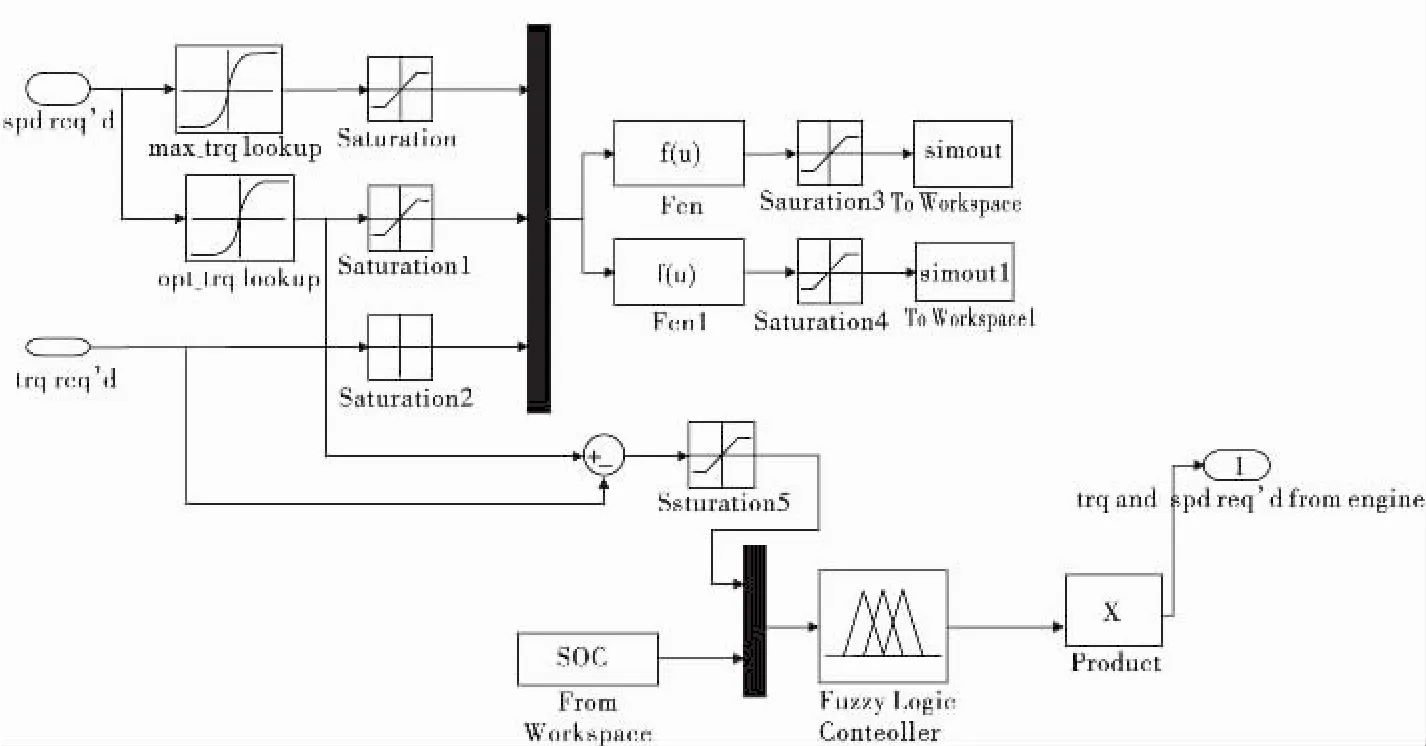
图7 模糊逻辑控制器Fig.7 Fuzzy logic controller
3 仿真结果与分析
选用ADVISOR软件中自带的一款并联式混合动力车,发动机为1.0 L的汽油机,ISG为永磁直流无刷电机,最大电流为210 A,最小电压为70 V,蓄电池为PB28铅酸电池组,并设定其主要参数见表1。

表1 PHEV主要参数Table 1 PHEV main parameters

图8 EUDC仿真循环工况Fig.8 Circulation conditions of EUDC simulation
CYC_EUDC工况下(如图8),将建立好的模糊逻辑控制策略模型嵌入ADVISOR中替换原来的电辅控制模型,对其控制效果进行仿真分析,仿真时间为1 369 s,行驶距离为11.99 km,两种控制策略仿真结果数据见表2。

表2 仿真结果主要参数Table 2 Main parameters of the simulation results
从表2可知,与电辅控制策略相比较,模糊控制对整车的油耗改善比较明显,其油耗降低了5.6%,整车的排放性能也有所改善,虽然NOX的排放略有增加,但CO和HC的排放与电辅控制策略相比分别降低了16.5%,1.4%,发动机平均效率提升了5%。综合来看,模糊控制策略在保证发动机动力性的前提下,改善了发动机的燃油消耗率和排放性,同时提高了发动机的效率。
图9是在整个仿真过程中发动机的实际输出转矩,可看出,在道路循环的停车时间,发动机关闭,降低油耗。图10是电动机实际输出转矩,由图可知,在汽车加速时,电动机提供辅助转矩;减速或怠速时,电动机回收制动能量,此时电动机当作发电机发电给蓄电池充电。

图9 发动机实际输出转矩Fig.9 Engine actual output torque

图10 电动机实际输出转矩Fig.10 Motor actual output torque
由图11可知,模糊控制策略保证了蓄电池具有较高的充放电效率,其中蓄电池充电平均效率为88.162 8%,放电平均效率为98.403 6%。

图11 蓄电池充电、放电效率Fig.11 Storage battery charging/discharge efficiency
蓄电池SOC变化如图12,初始值为0.7,最终值为0.706,保持在允许的变化范围内,即充放电平衡,从而可以延长蓄电池的使用寿命。

图12 电池SOC变化曲线Fig.12 Change curves of battery SOC
由图13可知,与传统电辅控制策略相比,模糊逻辑控制策略的发动机有比较多的工作点分布在效率较高的中高负荷区。
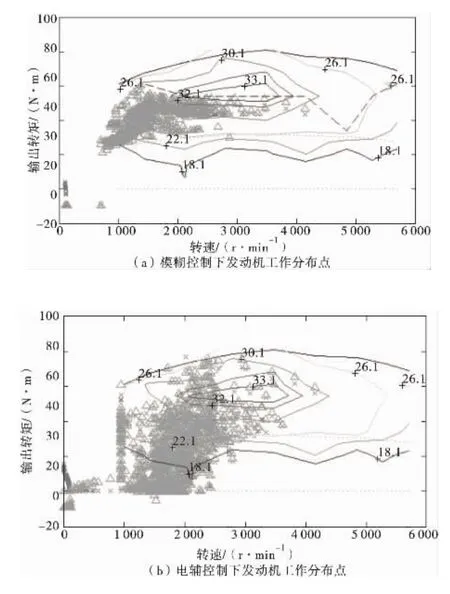
图13 不同控制策略下发动机工作分布点Fig.13 Engine work points under different control strategies
图14表明,模糊逻辑控制策略下发动机的平均工作效率比传统电辅控制策略要高,其中电辅控制策略下发动机平均效率只有22.3%,而模糊控制策略下发动机平均效率为27.3%,见表2。

图14 不同控制策略下发动机工作效率Fig.14 Engine efficiency under different control strategies
4 结语
笔者在电辅控制策略的基础上设计了一种基于模糊逻辑推理的动力分配控制策略。仿真结果表明,用模糊逻辑控制策略的PHEV燃油经济性、排放性、发动机输出转矩稳定性等优于电辅控制控制策略,并保证了电池SOC在较小的范围内变化,从而验证了该控制策略的准确性和可靠性。
(References):
[1] 李兴虎.混合动力汽车结构与原理[M].北京:人民交通出版社,2008:18-19.
Li Xinghu.The Structure and Theory of HEV[M].Beijing:China Communications Press,2008:18-19.
[2] 曾小华,王年庆,李俊,等.基于ADVISOR 2002混合动力汽车控制策略模块开发[J].汽车工程,2004,26(4):394-396.
Zeng Xiaohua,Wang Nianqing,Li Jun,et al.The development of hybrid vehicle strategy module based on ADVISOR 2002[J].Automotive Engineering,2004,26(4):394-396.
[3] 刘金琨.智能控制[M].北京:电子工业出版社,2005:36-42.
Liu Jinkun.Intelligent Control[M].Beijing:Electronic Industry Press,2005:36-42.
[4] 余志生.汽车理论[M].北京:机械工业出版社,2006:56-62.
Yu Zhisheng.Automotive Theory[M].Beijing:Mechanical Industry Press,2006:56-62.
[5] 楼顺天.基于MATLAB的系统分析与设计[M].西安:西安电子科技大学出版社,2001:9-10.
Lou Shuntian.System Analysis and Design Based on MATLAB[M].Xi’an:Xi’an Electronic and Science University Press,2001:9-10.
[6] 秦大同,姚明亮,胡明辉,等.基于模糊逻辑控制策略的混合动力汽车仿真研究[J].汽车工程,2007,29(11):934-941.
Qin Datong,Yao Mingliang,Hu Minghui,et al.Simulation study of the hybrid vehicle based on fuzzy logic control strategy[J].Automotive Engineering,2007,29(11):934-941.
[7] 陈建,李彦,吴亚祥,等.混合动力电动汽车模糊逻辑控制策略的研究与仿真[J].汽车工程,2006,28(4):322
Chen Jian,Li Yan,Wu Yaxiang,et al.Study and simulation on fuzzy logic control strategy for hybrid electric vehicle[J].Automotive Engineering,2006,28(4):322.
[8] 张德丰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2010:304-316.
Zhang Defeng.Earnest Examples of MATLAB/Simulink Modeling and Simulation[M].Beijing:Mechanical Industry Press,2010:304-316.
Simulation Research on PHEV Based on Fuzzy Logic Control Strategies
Li Jun,Zou Faming,Tu Xiong,Liu Biao,Wang Wenbin
(School of Mechatronics and Automotive Engineering,Chongqing Jiaotong University,Chongqing 400074,China)
In view of PHEV,a fuzzy logic control strategy for power distribution was designed,based on the electrical auxiliary control strategy.Its model was embedded in the simulation software ADVISOR,which was simulated in the condition of CYC_EUDC cycling road condition.The simulation results show that:compared with electric auxiliary control strategy,the designed control strategy based on fuzzy logic has a better economy,emission performance,robustness,and makes the engine work as near as possible to the optimizing working curve,as well as ensures that the SOC of the battery is changing in a small range.
parallel hybrid electric vehicle(PHEV);fuzzy logic control;simulation
U469.7
A
1674-0696(2013)02-0329-06
10.3969/j.issn.1674-0696.2013.02.34
2012-04-09;
2012-08-15
重庆市教委自然科学基金项目(KJ090408);重庆市教委项目(0903070)
李 军(1964—),男,重庆人,教授,主要从事汽车发动机排放与控制研究。E-mail:cqleejun@sina.com。
邹发明(1986—),男,江西抚州人,硕士研究生,主要从事汽车发动机排放与控制研究。E-mail:zfm8686886@163.com。
猜你喜欢
四川冶金(2018年1期)2018-09-25
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
电源技术(2015年11期)2015-08-22
