基于稀疏表示的视觉机器人运动目标跟踪研究*
2013-06-01 12:39许文龙朱加雷陈国华
机电工程技术 2013年9期
许文龙,朱加雷,王 飞,陈国华
(1.北京化工大学机电工程学院,北京 100029);2.北京石油化工学院能源工程先进连接技术北京市工程研究中心,北京 102600);3.中国石油长庆石化公司,陕西咸阳 712000)
0 前言
目标跟踪一直是机器人视觉伺服控制的研究任务和热点,不断发展的快速而稳定的跟踪算法[1]促进了机器人技术的工程应用与普及。早期使用的背景差分法和帧间差法对光照、背景扰动等情况鲁棒性差,一般只用于静态背景下的目标跟踪。著名的光流法抗干扰性强,但其采用迭代方法计算光流场比较耗时,且遵循的灰度守恒假设限制了使用范围。基于颜色直方图的均值漂移法(Mean-shift)采用核函数建模,对目标变形、遮挡和旋转等不敏感,但直方图对目标特征描述能力较弱,跟踪性能在目标和背景颜色相似时会大大折扣,该算法的变种Camshift[2]同样存在这些固有的缺陷。近年来图像局部特征算子SIFT[3]和SURF[4]因其良好的尺度不变性常用于目标的特征跟踪与匹配,但算子本身计算复杂度偏高。文献[5]则利用目标主动轮廓进行某种相关准则运算以实现跟踪的目的。学者们后来发现在跟踪的过程中引入学习和预测机制[6],主要包括分类器学习(贝叶斯分类器、决策树、Boosting 等)和预测模型(卡尔曼滤波、拓展卡尔曼滤波、隐马尔科夫模型、粒子滤波等)等数学工具,不仅提高了跟踪的性能,还能进一步实现目标的检测,但普遍存在的问题是需要学习大量样本才能发挥功能的分类器常常面临维数灾难,而滤波器模型参数无法通过先验知识获得。
针对分类器学习常常面临高维数据的问题,本文借助稀疏表示理论[7]对目标多尺度Harr特征[8]进行数据降维,采用高斯分布对稀疏后的Harr 特征值分布进行近似,并构建朴素贝叶斯分类器[9]进行目标正负样本的学习和更新,选择具有最大分类器响应值的状态向量作为目标的当前状态,实现了对运动目标的快速而有效的跟踪。实验结果表明该方法适用于视觉机器人运动目标跟踪,在提高实时性的同时能保持一定的鲁棒性。
1 稀疏表示理论简介

将长度为m的原始信号xm×1,在某一个矩阵Φ∈Rn×m(n ≪m)做线性随机投影得到一个长度为n 的输出样本yn×1,在满足某种条件时由yn×1完全可以恢复出原始信号xm×1,而稀疏表示理论的核心在于构建合适的变换基Φ(或投影矩阵)。
2 基于稀疏表示的运动目标跟踪
2.1 投影矩阵的设计
典型的投影矩阵是随机高斯矩阵R ∈Rn×m,rij~N(0,1),但是当m较大的时候R的致密性会带来较重的内存存储与计算负担,因此本文参考文献[10]对R 的元素进行重新定义来构建稀疏测量矩阵,如下所示:
使用该矩阵进行投影能保存原始目标特征空间分布信息,得到和传统的随机高斯矩阵一样的准确度,且该矩阵的构建仅仅需要一个均匀随机数发生器。特别地,s=3时投影矩阵R自身也变得非常稀疏(2/3 的元素全为0),能有效减少2/3 的计算负荷。本文利用均匀随机产生的s ∈{2,3,4 }构建测量矩阵R,每一行只有2 ~4项元素需要计算,因此一次投影的计算复杂度很低。此外,只需要存储R 中的非零项,这大大降低了内存负担。
2.2 跟踪目标的Harr特征稀疏表示
对于给定的大小为w×h 的目标,利用不同尺度的随机矩形滤波器hi,j(x,y)对其做卷积运算,滤波器的构造如下所示:

稀疏降维后的特征向量v中的每个元素vi都是不同尺度下Harr 特征的线性表示,保留着原始目标的图像特征信息,这样可以大胆的对压缩后的特征vi进行分类器快速学习而不用担心维数的问题。
2.3 朴素贝叶斯分类器的创建和更新
其中p(y=1)=p(y=0),用来区别vi是否隶属于目标。
英国环保署R&D128方法是由英格兰和威尔士基于评价欧洲委员会栖息地指令中2000个自然厂址的辐射效应开发的,由海洋、淡水和陆生环境的一系列微软Excel电子数据表模型组成。该方法模型可采用默认的一般参数或者厂址特定数据进行计算。计算非人类物种剂量的基础与ERICA模型类似(由参考生物的尺寸、放射性核素的摄入量和环境外照射决定),但考虑的参考生物和核素种类较少。特别是,R&D128方法包含惰性气体对非人类物种的影响评价,这在ERICA模型中没有包括。R&D128方法也包含ERICA模型默认的参考生物中未予考虑的英国重要的保护性生物。
实际上高维随机向量的随机投影总是遵循高斯分布,因此采用高斯分布对稀疏后的特征值分布进行近似,于是上式中的条件分布遵循高斯分布如下所示:

其中方差和均值遵循以下的跟新公式:

2.4 基于稀疏表示的目标跟踪框架
作为一种自上而下的跟踪方法,本文采用经典的贝叶斯跟踪框架并引入时下流行的正负样本学习机制,具体流程如下:

(2)分别提取多尺度的Harr 特征向量x 并在投影矩阵R上投影得到一系列低维向量v;
(4)得到Iz后用(1)同样的方法采集两种待学习样本,一种离目标比较近,作为正样本,一种较远,作为负样本,即:

(5)利用(2)的方法得到正负样本的低维特征,送入贝叶斯分类器学习,并用式(6)来更新分类器参数;
(6)第(t+1)帧里同(1)循环,实现运动目标跟踪。
3 实验研究和理论分析
3.1 跟踪的实时性
分别利用SIFT-KLT[3]、Camshift[2]、融合多特征的粒子滤波法PF[11]和本文方法针对静态背景下的身份证正面和监控视频中的行人进行跟踪定位,测试平台为双核计算机(Intel T4400+1G RAM)、微软HD3000 摄像头以及计算机视觉库Opencv2.3.1,计算平均处理时间得到图像帧率(fps)如表1所示。
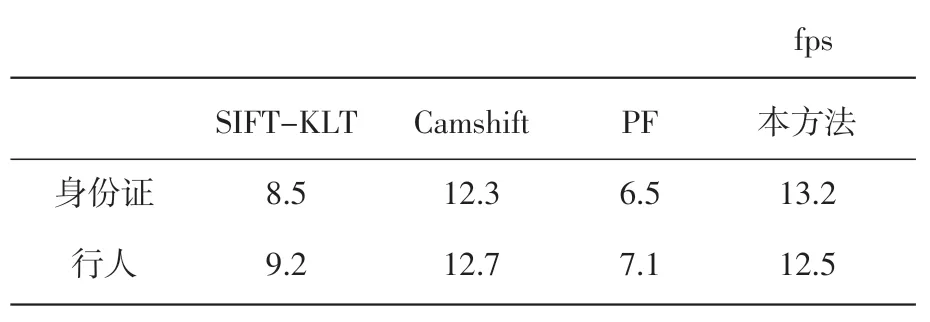
表1 处理时间对比
对比结果可知本文方法具有良好的实时性,究其原因是本方法将稀疏理论引入经典的贝叶斯跟踪中,稀疏降维后的样本特征学习和更新效率得到明显的提高,此外,稀疏后的特征向量依然保留原始图像特征信息,因此本文方法在提高实时性的同时不会引起跟踪性能的降低。
3.2 跟踪的鲁棒性
针对目标旋转、模糊以及光照变化等进行了PC-Webcam 平台上的跟踪性能试验,效果如图1所示,可知本文跟踪算法针对光照变化和旋转具有较强的鲁棒性,针对目标模糊具有一定的鲁棒性。由于本文使用的Harr 特征是一种基于灰度计算的矩形特征,常用于人脸检测和识别,对目标旋转的敏感度很小,而朴素贝叶斯分类器对正负样本强大的学习功能能够不断更新目标外观模型,从而提高了对光照变化的鲁棒性。但是参数r、α 、β 、λ 的取值大小直接作用于稀疏后的Harr 特征值高斯分布特性,取值越大分布相对越集中,检测模糊性越小,这会给目标模糊检测带来一定的影响。
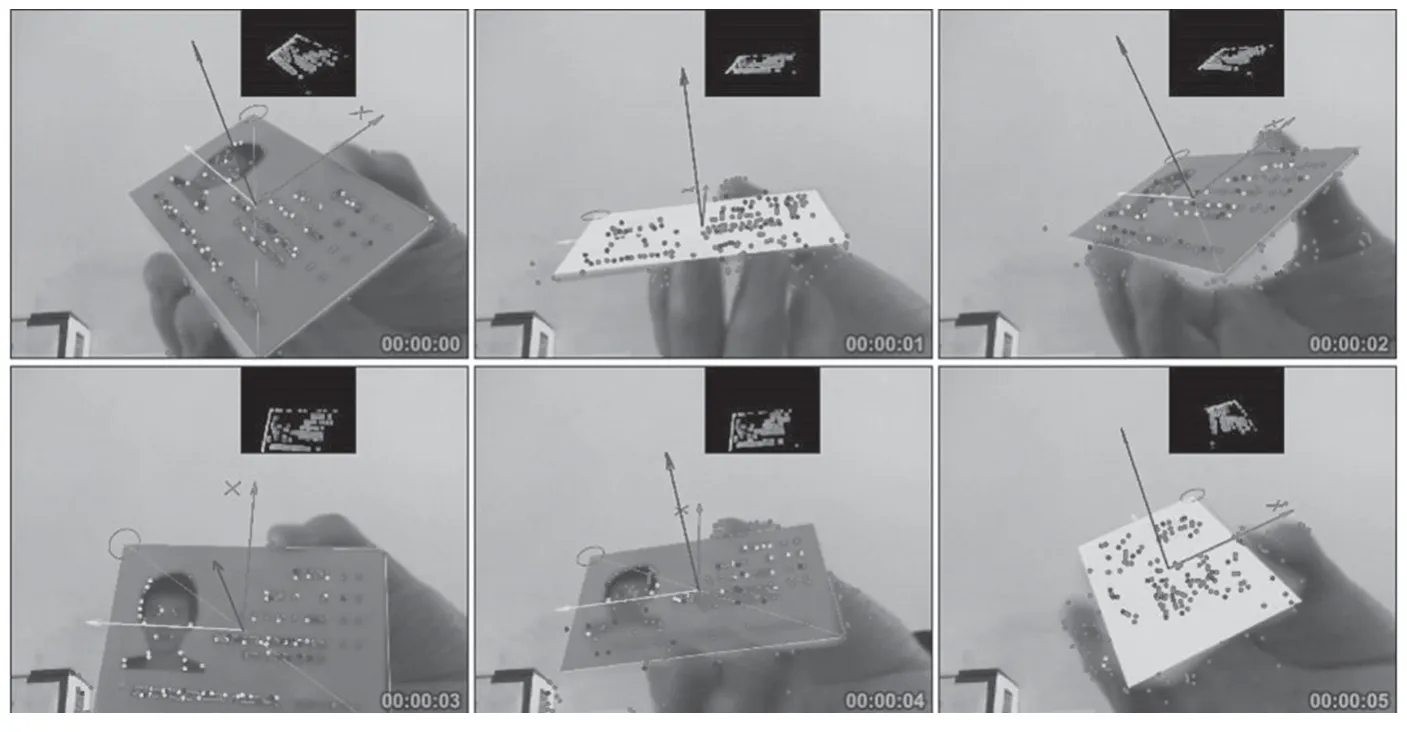
图1 跟踪效果(r=5,α=10,β=50,λ=0.85)
3.3 视觉机器人的目标跟踪定位测试
在单目视觉伺服机器人MOTOMAN-UP6上进行目标跟踪定位测试,图2 为机器人结构图,将目标物块沿着正方形工作台面上的箭头方向移动,手眼一体(eye-in-hand)机器人捕获运动目标视觉信息用于伺服反馈,驱动手臂到达跟踪目标中心位置。为了便于比较,取实际移动直线的6 等分点作为参考,综合物体实际移动直线、视觉图像处理理论计算得到的目标中心位置连线以及手臂移动位置连接线绘成图3。
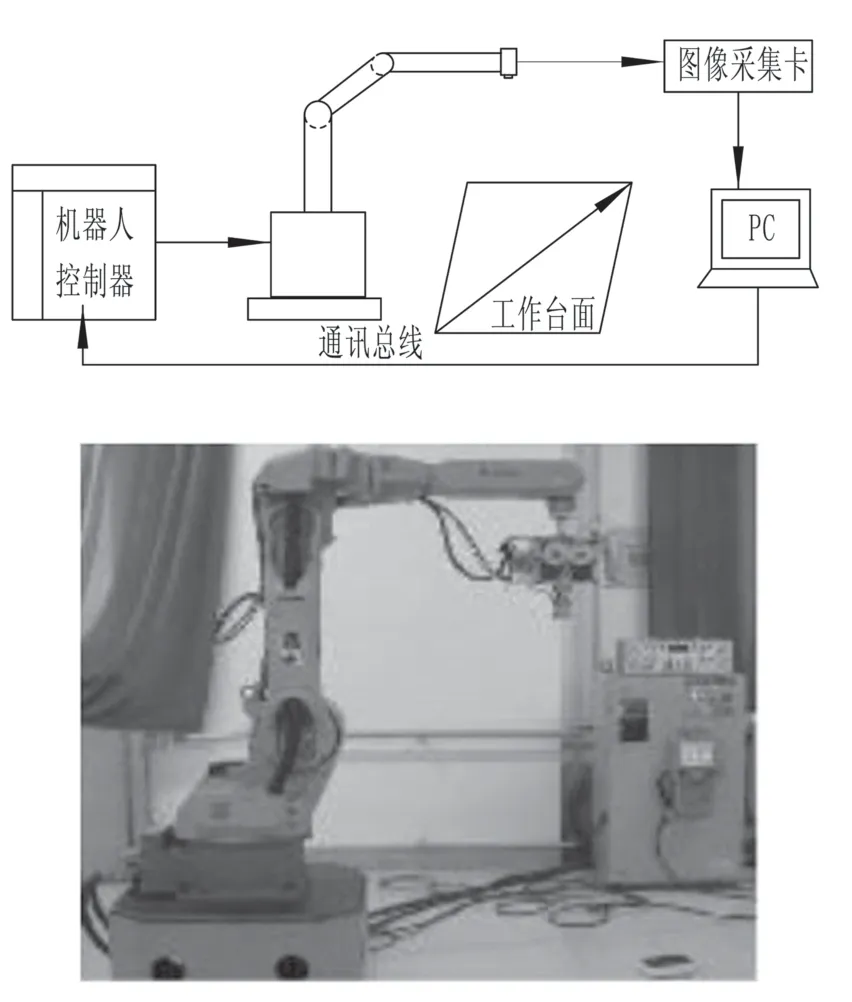
图2 机器人系统结构(上)和实物(下)
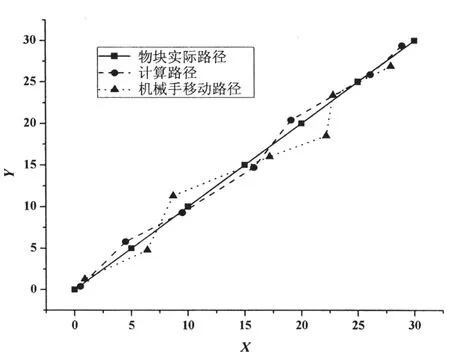
图3 轨迹比较图(坐标轴单位与工作平台一致为50 mm)
可知,图像处理得到跟踪目标中心点轨迹和实际情况吻合度较好,说明本文目标跟踪算法满足机器人对运动目标的定位要求,而机器人手臂移动轨迹与实际路径存在一些差距,推测原因是PC端图像处理和机器人关节控制的不同步直接导致图像雅各布矩阵的传递产生滞后。
4 结论
本文的创新之处是在经典贝叶斯跟踪框架的基础上借助稀疏表示理论对目标多尺度Harr 特征进行有效降维,有效提高了贝叶斯分类器的样本学习和更新效率。由于稀疏后的特征保留了目标图像特征信息,因此本文方法在提高运动目标跟踪实时性的同时依然表现出良好的鲁棒性,试验结果表明本文方法适用于视觉伺服机器人的运动目标跟踪与定位。
[1]侯志强,韩崇昭.视觉跟踪技术综述[J].自动化学报,2006(04):603-617.
[2]郭世龙,李文锋,李波.基于Camshift 算法的移动机器人视觉跟踪系统[J].华中科技大学学报:自然科学版,2008(S1):156-158+166.
[3]刘玉,王敬东,李鹏.一种基于sift 和klt 相结合的特征点跟踪方法研究[J].宇航学报,2011,32(07):1618-1625.
[4]彭欣,刘富强,宋华军.基于surf 目标跟踪算法研究[J].长春理工大学学报:自然科学版,2011,34(02):138-141+153.
[5]丛奎荣,韩杰,常发亮.视觉机器人货物轮廓提取与定位[J].山东大学学报:工学版,2010(01):15-18.
[6]CHAUMETTE F,HUTCHINSON S.Visual servo control.II.Advanced approaches [Tutorial][J].Robotics& Automation Magazine,IEEE,2007,14(1):109-118.
[7]邓承志.图像稀疏表示理论及其应用研究[D].武汉:华中科技大学,2008.
[8]Grabner,H.,M.Grabner.Real-time tracking via on-line boosting [A].Proc.BMVC [C].British Machine Vision Association,2006.
[9]蒋良孝.朴素贝叶斯分类器及其改进算法研究[D].北京:中国地质大学,2009.
[10]LIU L,FIEGUTH P.Texture classification from random features[J].Pattern Analysis and Machine Intelligence,2012,34(3):574-86.
[11]赵璇,何波,吉德志.基于粒子滤波的机器人定位及动态目标跟踪[J].系统仿真学报,2008,20(24):6490-6493,6497.
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
电子测试(2018年1期)2018-04-18
数理化解题研究(2017年4期)2017-05-04
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
项目管理技术(2016年12期)2016-06-15
铁道通信信号(2016年6期)2016-06-01
西南交通大学学报(2016年6期)2016-05-04
电子器件(2015年5期)2015-12-29