基于MATLAB与Pro/E码垛机器人动力学分析*
2013-06-01 12:39廖玉城曾小宁
机电工程技术 2013年12期
廖玉城,曾小宁
(广东省机械研究所,广东广州 510635)
0 引言
随着企业劳动力成本不断上升,现代企业纷纷对现有生产方式进行自动化改造,许多搬运、物料的码垛堆放等都需要以机械替代人工。因此码垛机器人的研究应用具有很大的价值[1]。计算机器人完成特定的任务时各轴所需要的力矩,通常通过解机器人逆运动学方程求得。由于解逆运动学方程比较复杂,给开发工业机器人造成了一定的难度。本文介绍了Pro/E软件在分析码垛机器人动力学领域的应用。码垛机器人在完成典型任务时由已知的运动轨迹,通过Pro/E机构分析模拟求得机器人各输入轴的运动参数,然后用这些运动参数作为各轴伺服电机的驱动参数,模拟仿真机器人的运动,以求得机器人各轴的力矩。
1 码垛机器人结构分析及运动学建模
1.1 码垛机器人结构分析
码垛机器人机构简图如图1所示。

图1 码垛机器人机构简图
本机器人共有4 个自由度,其中Ⅰ轴绕竖直轴(z轴)在水平面(xy平面)内转动的转动由电机经减速机直接驱动,它使末端点的轨迹为一个旋转体;大臂绕Ⅱ轴做俯仰运动,由水平安装的电机径减速机直接驱动;小臂绕Ⅲ轴的运动,由电机的转动经曲柄、拉杆转化为小臂的绕Ⅲ轴转动;末端执行器绕Ⅳ轴的转动由电机经减速机直接驱动。此外由于该机器人采用双平行四边形结构,使得末端执行器中心轴线始终保持竖直[2]。
1.2 机器人运动学建模
首先如图2 所示建立机器人的D-H 后置坐标系。根据图2 所示列出后置坐标系的机器人D-H参数表,如表1所示。

图2 码垛机器人机构简图

表1 机器人的D-H 参表
相邻两连杆之间的齐次变幻矩阵通式为:

把表1的数据代入(1)式得:

末端连杆相对基坐标系的位姿变矩阵:

其中:ci=cos(θi),si=sin(θi)(下同)。
此外,由图1 可知机器人的末端执行器与末端连杆的几何关系,根据式(6)求得机器人末端执行器相对基坐标系的位姿变幻矩阵:
由(7)式可得机器人工作空间的参数方程,其中关节变量θ1、θ2、θ3变化范围由表1给出:

1.3 机器人工作空间
为了能直观地观看到机器人的工作空间,根据式(8),在不考虑机械干涉的条件下,使用MATLAB对机器人工作空间参数方程编程[3],求解其工作空间三维图,如图3~5所示。

图3 机器人工作空间三维图

图4 机器人工作空间在xy面投影图
2 模拟仿真机器人完成典型任务
2.1 任务假设条件
(1)升降行程200 mm 平移行程500 mm(如图6);
(2)周期要求:1 800 包/h,即30 包/min,2 s一个来回;
(3)负载20 kg。
2.2 时间规划
根据任务假设条件制定如表2 所示,单个行程进行时间规划:上升时间0~0.4 s、平移时间0.3~0.8 s,下降时间0.7~1 s。

图5 机器人工作空间在xz面投影图

图6 行程

表2 机器人运动时间参表
2.3 计算末端执行器的相对位移
计算公式如下所示

由式(9)、(10)、(11)、(12)算得末端执行点运动轨迹如图7所示。

图7 运动轨迹
2.4 选择工作区域
结合机器人工作空间(图5)和完成典型任务时机器人末端的工作轨迹选择如图8 所示工作区域。

图8 工作区域
其中各点坐标分别为A(1 050,-250,590)、B(1 050,-250,790)、C(1 050,250,790)、D(1 050,250,590)。
所以末端执行器的绝对位移为:


图9 Ⅰ轴位移、速度、加速度图
2.5 运动仿真分析
根据机器人末端运动轨迹由Pro/E机构分析模块求出Ⅰ、Ⅱ、Ⅲ轴完成典型任务时的运动参数如图9、图10、图11所示。
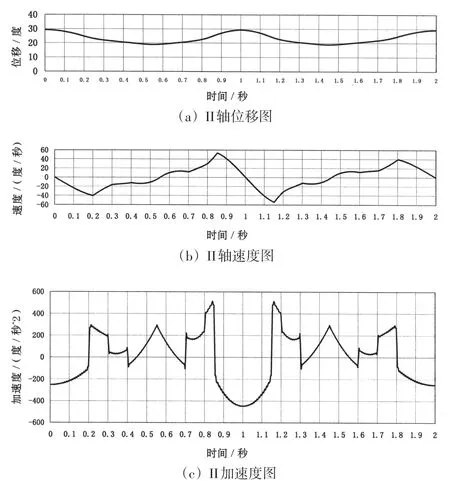
图10 Ⅱ轴位移、速度、加速度图

图11 Ⅲ轴位移、速度、加速度图
把运动参数作为各轴伺服电机的驱动参数,模拟仿真机器人的运动,求得机器人Ⅰ、Ⅱ、Ⅲ轴的力矩如图12、13、14所示。

图12 Ⅰ轴力矩图

图13 Ⅱ轴力矩图

图14 Ⅲ轴力矩图
3 结束语
本文针对完成典型任务时机器人各轴电机、减速机的选择校核的前期力矩计算进行了详细仿真分析,为进一步开发码垛机器人提供了精确的数据。通过MATLAB 计算机器人运动空间,进行运动规划。利用Pro/E强大的建模能力建立机器人的3D模型,并用其机构分析模块对机器人进行动力学分析,由Ⅰ、Ⅱ、Ⅲ轴运动参数求得各轴力矩。
[1]毕胜.国内外工业机器人的发展现状[J].机械工程师,2008(7):5-7.
[2]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[3]王智兴,樊文欣,张保成,等.基于Matlab 的工业机器人运动学分析与仿真[J].机电工程,2012(01):33-37.
猜你喜欢
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
河北省科学院学报(2020年1期)2020-05-25
电子制作(2019年20期)2019-12-04
测控技术(2018年12期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11