
基于变结构控制的反鱼雷鱼雷导引律设计
2013-05-28 06:07:54李宗吉张西勇
水下无人系统学报 2013年1期
刘 洋 , 李宗吉 , 张西勇
基于变结构控制的反鱼雷鱼雷导引律设计
刘 洋1, 李宗吉2, 张西勇2
(1. 海军工程大学 训练部, 湖北 武汉, 430033; 2. 海军工程大学 兵器工程系, 湖北 武汉, 430033)
针对传统鱼雷导引律命中精度低、弹道法向过载大的不足, 设计了基于变结构控制的反鱼雷鱼雷(ATT)导引律。该导引律以反鱼雷鱼雷和目标鱼雷之间运动关系数学模型为基础, 建立了以航向角作为控制量, 视线角速度作为滑模面的变结构控制模型, 该模型所需参数少, 且模型参数能够自适应调整。理论推导和仿真结果表明, 该导引律对模型参数及环境干扰具有很强的鲁棒性, 弹道稳定平滑, 具有非常高的命中精度。
反鱼雷鱼雷; 变结构控制; 导引律; 鲁棒性
0 引言
随着科学技术的发展, 鱼雷武器正朝着智能化, 精确制导方向发展, 对水面舰艇以及潜艇构成的威胁越来越大。鉴于此, 世界各国投入巨资开展舰艇反鱼雷武器的研究, 其中硬杀伤的反鱼雷鱼雷(anti-torpedo torpedo, ATT)成为研究的热点[1-2]。
和常规鱼雷相比, ATT因其攻击目标速度快、目标尺寸小及机动性强, 而具有更高的命中精度。在复杂的水文条件下, 测量误差和参数摄动以及目标机动的存在, 使得常规鱼雷导引律无法满足ATT的要求, 因此, 需要针对ATT的特点设计相应的导引律。滑模变结构控制对参数摄动和干扰具有强鲁棒性, 结合平行接近导引法, 本文设计了一种基于变结构控制的反鱼雷鱼雷导引律, 仿真结果表明, 该导引律具有很高的命中精度和抗干扰能力。
1 反鱼雷鱼雷导引问题的数学描述
以平面内情况为例, ATT-鱼雷相对运动关系如图1 所示。由图1可以导出如下关系式

式中: 代表ATT与鱼雷之间的相对距离; 和分别表示目标速率和ATT速率; 表示视线角; 和分别代表目标和ATT的速度方向角。
令




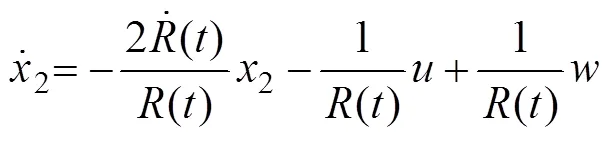
把式(4)~式(7)代入式(2)和式(3), 结合式(1), 得

2 反鱼雷鱼雷导引律设计
2.1 传统鱼雷导引律及存在的问题
鱼雷导引律是鱼雷导向目标的运动规律, 对鱼雷命中精度起决定性作用。传统鱼雷导引律包括比例导引法、提前角导引法和最优控制导引法。比例导引法要求鱼雷旋转角速率与视线角变化角速率成正比, 理论上比例导引法能够达到很高的命中精度, 但前提条件是模型参数能够准确无误, 在复杂的水文条件下, 由于干扰和噪声的存在, 以及测量条件的限制, 难免会产生参数摄动和干扰, 而比例导引法的抗干扰能力差, 在工程上无法满足ATT的精度要求[3-4]。
固定提前角法是比例导引法的特例, 在前半球开始导引时, 要绕到目标的背后, 而ATT恰恰是从前半球拦截, 其精度也不能满足ATT拦截的需要。最优制导律虽然在理论上可获得比比例导引更好的性能, 但是由于最优制导律形式复杂, 需要较多的制导参数(这些参数往往需要通过复杂的滤波算法得到, 增加了制导计算量而且难以获得准确的结果), 并且严格依赖所采用的动力学模型, 所以鲁棒性较差。
鱼雷目标探测装置很难直接探测到目标的加速度、角加速度等信息, 采用算法进行估计又存在较大误差, 在导引律中一般作为干扰来处理, 而变结构滑模控制由于具有鲁棒性强, 对模型参数变化不敏感等特点。目标和ATT之间的视线角以及目标和ATT的航向角通过声纳装置很容易确定, 本文通过ATT和目标之间的运动关系数学模型, 设计了基于变结构控制的ATT导引律。
2.2 变结构导引律设计
基于准平行接近原理, 选取切换平面为
根据式(11) , 构造滑模趋近律

将式(11)和式(12)代入式(13), 得滑模制导律

2.3 稳定性分析

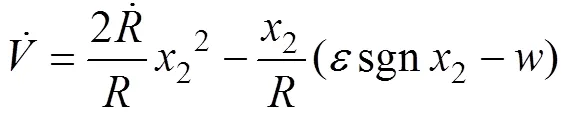
把式(14)代入式(16), 得
3 仿真结果与分析
以此为初始条件, 联立式(1)、式(7)、式(11)、式(14), 建立仿真模型
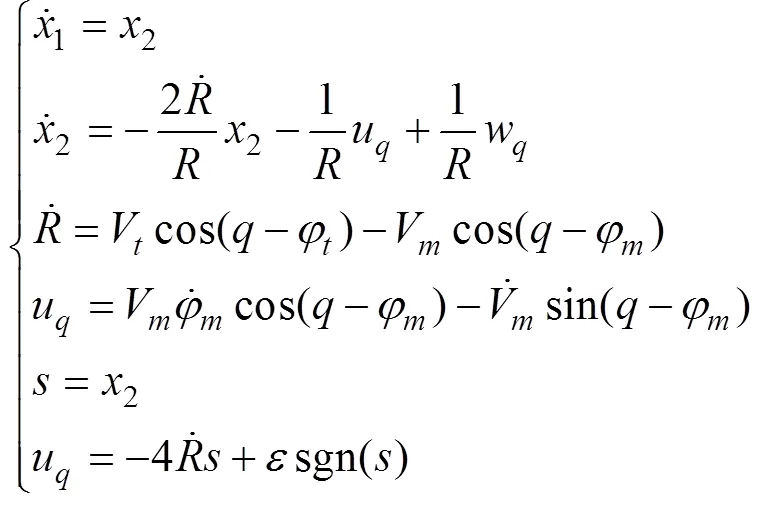

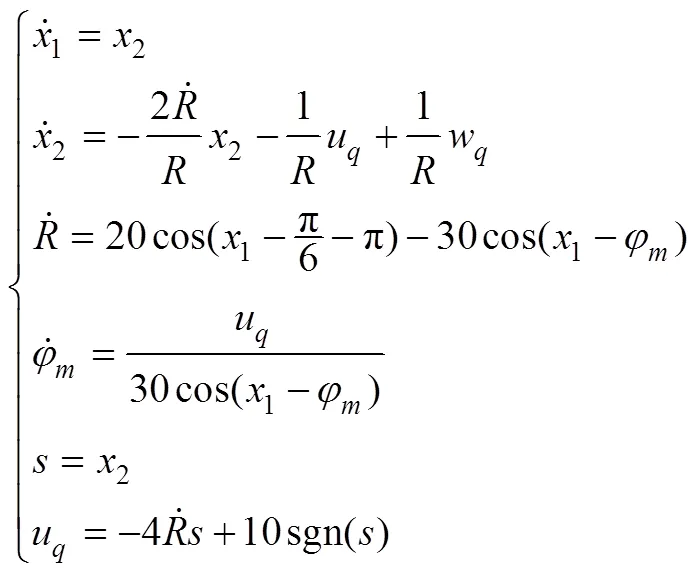

图2 ATT和目标鱼雷视线角随时间变化曲线

图3 ATT和目标鱼雷视线角速度随时间变化曲线
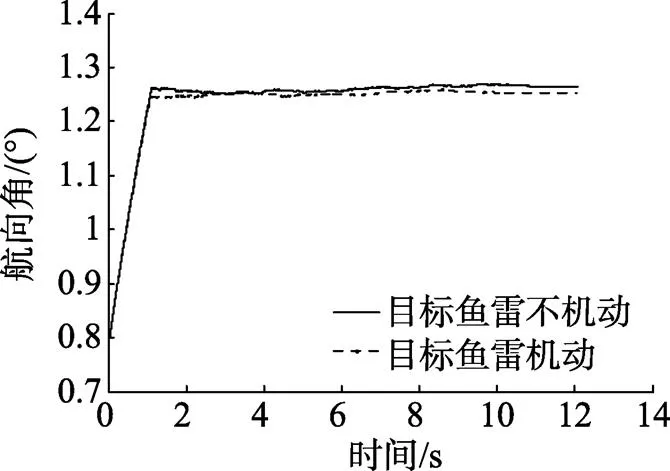
图4 ATT航向角随时间变化曲线
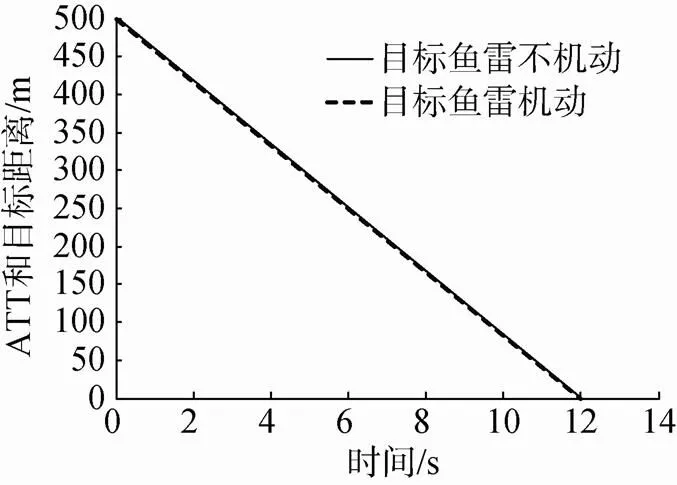
图5 ATT和目标鱼雷距离随时间变化曲线
由仿真结果可以得出, 目标鱼雷的机动不影响变结构滑模导引律准确导向目标, 系统进入滑模状态的时间和命中目标的时间前后相比较基本没有变化, ATT和目标鱼雷的视线角很快收敛到一恒定值。
4 结束语
本文设计了基于变结构的反鱼雷鱼雷导引律,通过控制ATT的航向角来导向目标鱼雷, 并在理论上证明了该导引律能够使ATT稳定地以准平行接近方式导向目标鱼雷, 并对目标鱼雷的机动和环境干扰具有很强的鲁棒性。
以ATT和目标运动关系数学模型和变结构控制模型为基础, 建立了在本文所设计的导引律导引下ATT 航行的仿真模型。从仿真结果可以看出, ATT和目标鱼雷的视线角很快稳定在一恒定值, 具有零脱靶量和百分之百的命中精度, 当目标鱼雷存在机动时, 仍然可以保持这一可贵特性。
该导引律还具有自适应特点, 模型参数随着ATT和目标距离的变化而变化。另外该导引律所需的参数少, 只需航向角作为控制量, 降低了控制系统复杂度。
[1] Shtessel Y B, Shkolnikov I A, Levant A. Guidance and Control of Missile Interceptor Using Second-order Sliding Modes[J]. IEEE Transactions on Aerospace and Electronic System, 2009, 45(1): 110-124.
[2] Wu Peng, Yang Ming. Integrated Guidance and Control Design for Missile with Terminal Impact Angle Constraint Based on Sliding Model Control[J]. Journal of Systems Engineering and Electronics, 2010, 16(4): 56-60.
[3] 高为炳.变结构控制理论基础[M]. 北京: 中国科学技术出版社, 1990.
[4] 禹春来, 许化龙, 刘云峰, 等. 导弹姿态控制系统快速输出采样离散变结构自适应控制[J]. 弹箭与制导学报, 2008, 28(2): 77-80.Yu Chun-lai, Xu Hua-long, Liu Yun-feng, et al. Discrete Variable Structure Control for Missile Attitude Control with Fast Output Sampling Feedback and Adaptive Control[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(2): 77-80.
[5] 高磊, 徐德民, 任章.被动式鱼雷的自适应变结构制导律设计[J]. 兵工学报, 2001, 22(2): 280-283 Gao Lei, Xu De-min, Ren Zhang. Adaptive Variable Structure Guidance Law For Passive Torpedo[J]. Acta Armamentarii, 2001, 22(2): 280-283.
[6] 詹致祥.鱼雷制导规律及命中精度[M]. 西安: 西北工业大学出版社, 1995: 116-232.
[7] Cheng S S. Nonlinear Robust Digital Controller Based on Fuzzy Model for Homing Missiles [J]. Chaos, Solutions and Fractals, 2008(38): 192-198.
Design of Guidance Law for Anti-torpedo Torpedo Based on Variable Structure Control
LIU Yang1, LI Zong-Ji2, ZHANG Xi-Yong2
(1. Training Department, Naval University of Engineering, Wuhan 430033, China; 2. Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
Aiming at the low hitting precision and big normal overload of traditional torpedo guidance law, a guidance law for an anti-torpedo torpedo(ATT) based on variable structure control is designed. This ATT guidance law is on the basis of a mathematical model of movement relation between an ATT and a target torpedo. A variable structure control model is established taking course angle as control parameter and angular speed of line-of-sight as sliding mode surface. The proposed model needs a few parameters, and the parameters can be self-adaptively adjusted. Theoretical analysis and simulation show that the ATT guidance law is very robust for model parameters and environmental interference, and can gain high hitting precision and stable trajectory.
anti-torpedo torpedo (ATT); variable structure control; guidance law; robustness
TJ630.33; TJ765
A
1673-1948(2013)01-0039-04
2012-05-18;
2012-06-29.
船舶工业国防科技预研基金项目资助(401060901-0261-002).
刘洋(1983-), 男, 在读硕士, 研究方向为鱼雷制导与控制技术.
(责任编辑: 杨力军)
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
特区文学·诗(2021年6期)2021-12-22 01:02:51
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
当代贵州(2015年19期)2015-06-13 09:42:32
太空探索(2014年1期)2014-07-10 13:41:49
