基于BMU/LVDS总线的闭环总检查测试技术研究
2013-05-15 00:57宋征宇
航天控制 2013年3期
周 欢 宋征宇
北京航天自动控制研究所,北京 100854
总检查是模拟飞行(模飞)状态下对系统工作情况的全面检查[1]。运载火箭一般通过总检查测试来检验全箭电气系统的匹配性,这种测试对控制系统而言是开环的。面对复杂的飞行控制系统,开环状态下的静态参数测试和有限的系统功能性匹配检查,与系统真实状态差距较远。此外开环的总检查难以对采用迭代制导的控制系统进行有效考核。由此,本文提出了一种适应总检查特点的闭环模飞测试方案,可以对迭代算法进行较为充分的验证,同时兼顾对惯性器件静置状态下电气性能的检查。
闭环总检查测试已研究了较长时间,但一直未能很好地解决实时性问题。新一代运载火箭采用的箭地高速串行总线LVDS为箭地间的数据传输提供了高速通道,此通道可实现箭地数据的实时交互;同时地面的实时操作系统则为地面模块的实时处理提供了保证;BMU的通信邮箱则为箭地间实时数据传输提供接口。
本文介绍和论述方案提出的必要性、原理以及实现的技术支持,基于此提出了几点闭环实现的设计思路,然后建立方案平台进行实验,对火箭模型参数的准确性以及箭上制导控制算法的适应性进行了系统级的验证。
1 闭环总检查测试方案
1.1 闭环总检查测试方案的提出
现行的控制系统总检查原理如图1(a),从惯性测量组合到伺服的测试是开环的。即使采用“摄动+迭代”制导技术方案的火箭的总检查模飞测试也是开环的,在摄动制导飞行段通过设计一条供测试用的与程序角和关机时间等效的模飞弹道即可对摄动制导算法进行验证。由于迭代制导没有标准弹道,以上这种开环的测试不能对其进行验证,于是目前的迭代制导模拟飞行段就采取一种数据替换的方式,即进入迭代后,飞行软件不再使用从惯性器件采样的数据进行导航,而是采用一组事先计算好并存贮在箭载计算机内的标准弹道数据直接替代,使得总检查测试进入了箭机自循环状态。这种方法对迭代制导的考核并不充分,同样在这一飞行段内对惯性器件也无法考核。虽然在半实物仿真中可以对迭代制导算法进行考核,但并不是全系统下的。
本文所提出的闭环总检查测试方案弥补了开环测试的不足。测试时通过箭地的数据交互,使火箭“动”了起来,满足了迭代制导对火箭当前运动状态的实时输入需求;同时将此飞行段的惯组数据利用起来,这样就可以对惯组进行检查。测试时,惯组处于静置状态,适合在火箭已组装好的情况下展开测试。综上所述,该方案能够更好地满足地面测试覆盖性与有效性的要求。
1.2 闭环总检查框架及原理
在满足控制系统总检查测试要求,不对系统测试状态的软硬件进行重大改变的前提下,借鉴闭路仿真的思路,在模拟飞行测试时向地面测发控系统(根据具体情况可以选择Vxworks前端机或是测试主控制)加入仿真模块,其物理连接如图2。地面实时地获取伺服机构摆角信息,进行箭体运动的模拟,解算出惯性器件的仿真输出,并同样实时地反馈到箭机中参与导航运算,以此往复循环就实现了闭环模飞,原理如图1(b)。
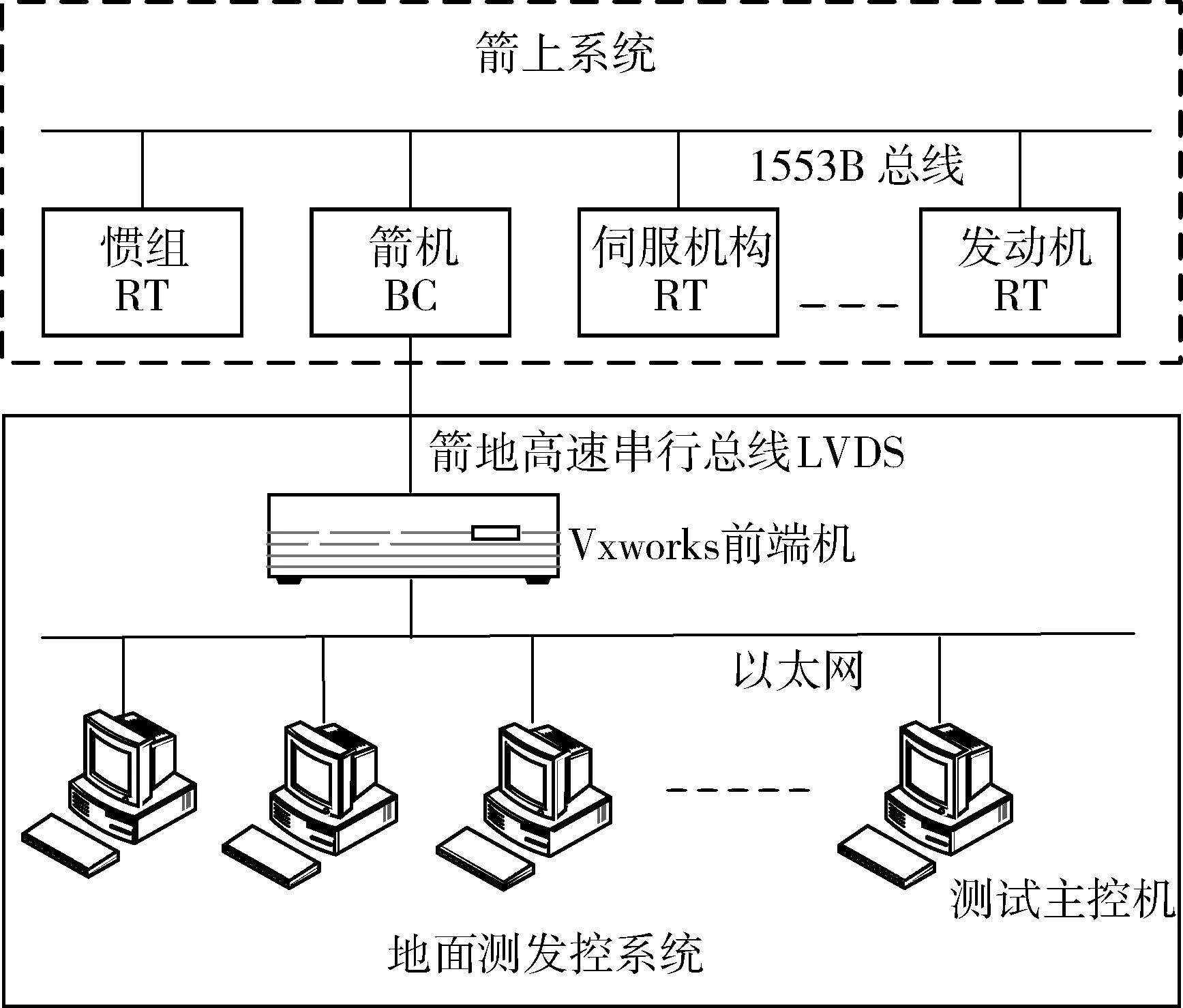
图2 总检查物理连接图
1.3 闭环测试实现的技术支持
新一代运载火箭所采用的一系列新技术为闭环总检查测试的实现提供了技术保证,尤其是BMU和LVDS总线技术的使用为解决闭环总检查测试实时性问题起到了关键作用。下面简单介绍一下BMU和LVDS总线技术。
箭机BMU通信原理如图3,BMU用于完成箭地通信控制,提供箭地主动通信邮箱、箭机总线数据自动监控并下传功能;飞行控制软件则是通过BMU访问接口完成与地面的通信控制。测试时,大量的箭上1553B总线数据通过自动监听功能下传到地面,以检测箭上运行状态;而通信邮箱则是射前准备段地面指令和箭上执行结果的传输通道。在闭环测试时正好可以把上、下行兼备的通信邮箱利用起来,为箭地数据通信提供接口通道,这样地面可以在综合实验的硬件不做任何改动的情况下获取箭上各种数据。
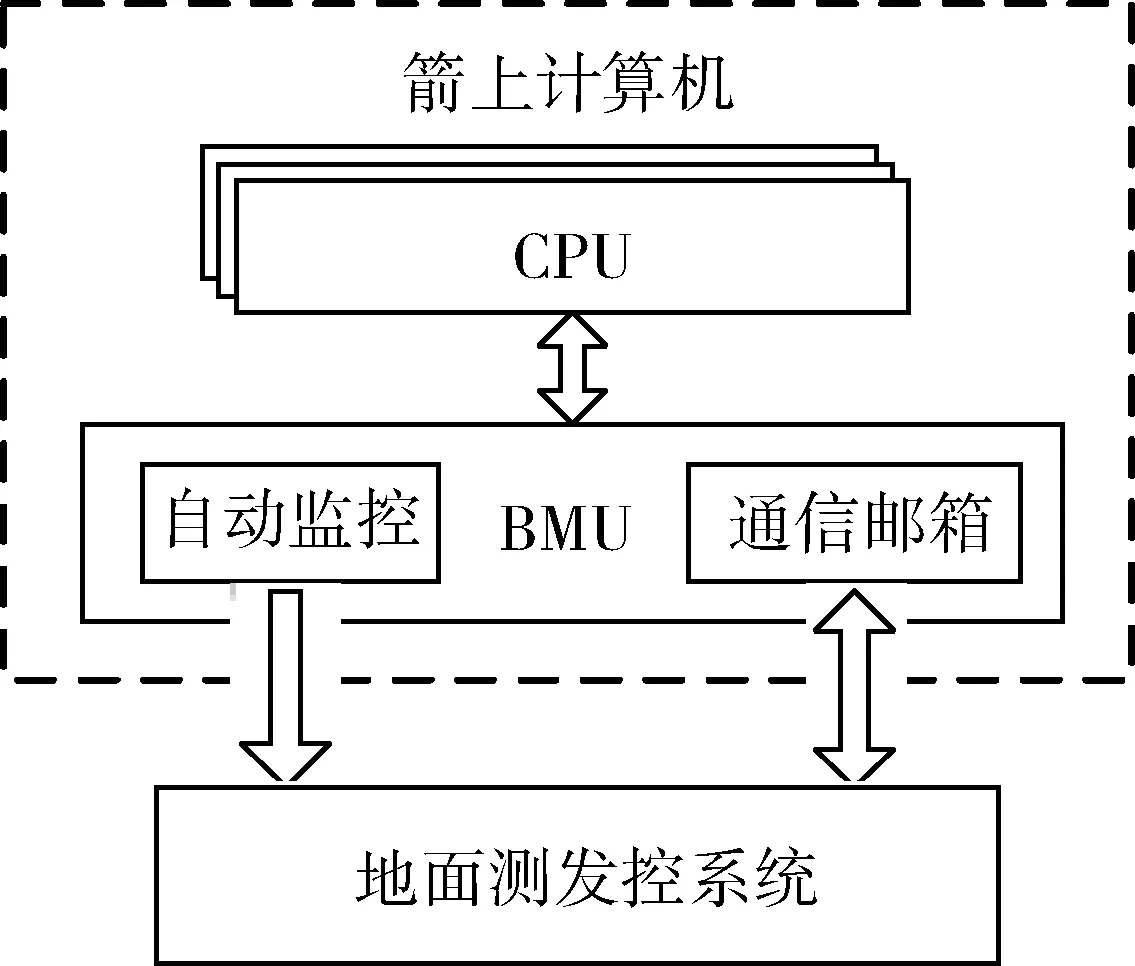
图3 箭机BMU通信原理图
LVDS(Low Voltage Differential Signaling)即低电压差分信号,是20世纪90年代才出现的一种数据传输和接口技术。这种技术的核心是采用极低的电压摆幅高速差动传输数据,可以实现点对点或一点对多点的连接,具有低功耗、低误码率、低串扰和低辐射等特点。因此LVDS在对信号完整性、低抖动及共模特性要求较高的新一代运载火箭控制系统中得到了应用。
LVDS总线采用中断接收方式,在系统测试时,LVDS总线能够实时监测箭机DSP运行状况,对其数据总线、地址总线以及控制总线进行实时监控,并根据需求输出监控结果;同时也可以上传飞行软件、诸元数据和指令信息。高速串行通信总线最小单元是32bit,其中数据区占65535字节,通信速率一般可设置为5Mbps,10Mbps等。对于闭环方案需要增加的箭地交互变量数据,若每个变量设置为4个字节,即使增加100个变量(即400个字节)也完全在LVDS总线的承受范围内。
2 闭环总检查的设计要点
控制系统综合实验的闭环设计不同于半实物闭环仿真。一般的半实物闭环仿真是把仿真模块搭载在1553B总线上,利用1553B板卡模拟箭上终端RT实现闭环的。这样的闭环改变了箭上的物理连接,破坏了箭上系统的完整性,不适合在火箭控制系统综合实验中开展,更不适合在火箭已组装好的情况下开展。
针对系统级测试所设计的闭环总检查不对箭上系统的硬件做任何改变,它的仿真模块置于较为灵活的地面测发控系统。这就涉及到通信链路的设计、惯性器件的检查、仿真模块结构的设计以及箭地软件的设计。
2.1 闭环通信接口及链路的设计
从图3可以看出地面数据的上传必须通过箭机BMU的通信邮箱,所以地面测发控的箭地通信机需要将原有最高优先级的自动监控功能变为通信邮箱,以保证箭地数据交互的实时性;同时,提高地面测发控对通信邮箱的优先级。
总检查闭环设计的数据流如图4所示,地面往箭上传的数据有脉冲和导航数据(包括速度、位置和角度等信息),箭上往地面传的数据有舵偏角和指令信息。地面仿真模块上传的脉冲全量数据按照真实惯组在1553B上的格式及顺序传到箭上,同样导航信息也按照导航的数据格式顺序传至箭上。

图4 闭环数据流图
从测试的起飞时刻开始,箭地间闭环开始时间为Ts。为了让Ts的设置更为灵活,在地面模块中添加对箭体进行控制的GNC模块,该模块是简化版的飞行软件。从起飞到Ts时刻,箭体运动模型与GNC模型通信,传递脉冲和舵偏角,同时箭体模型接收箭上的指令信息;当Ts时刻箭体运动模型收到闭环标志时,停止与GNC模块通信,开始与箭上通信,如图4的虚线框数据流。
2.2 闭环同时对惯性器件的检查
新一代运载火箭均是采用“摄动+迭代”的制导方案,而在迭代飞行段的总检查模飞测试时真实惯组输出并没有参与测试(具体测试方式见2.1)。为增加测试的覆盖性,在闭环测试的同时应考虑对惯组的检查。
实现惯组功能的检查,需在地面仿真模块输出事先扣去惯性器件在理论状态下随地球自转的输出,再将真实惯组值和地面仿真值一起输入到箭机中进行导航。这样,在导航输入量真实反应箭体运动特性的基础上,将惯组的随机误差项引入箭机,当惯组标定参数不准或精度超标时,导航结果就会体现差异,真实惯组的数据就参与到整个火箭的飞行控制过程,从而实现对惯性器件功能的检查。
对于新一代运载火箭控制系统而言,这样的一减一加操作可以做到严格的时间同步。如果说单独对惯组采取以上复杂的检查方式是完全没有必要的,但是以上对惯组的检查是在整个测试系统闭环的基础上,与闭环是一起的,而不是单独抽离的一项实验,这只是在设计方案时考虑了开环测试时所遗漏的一点。
2.3 仿真模块流程设计
图5是简化的地面仿真模块流程图,模飞测试起飞时刻开始调用Sim程序,每周期调用一次,Sim程序包括自循环模块和闭环模块。从图4可以看出自循环模块包括箭体运动模型和GNC模型,而闭环模块则为扣去惯组静置状态下理论值的箭体运动模型。
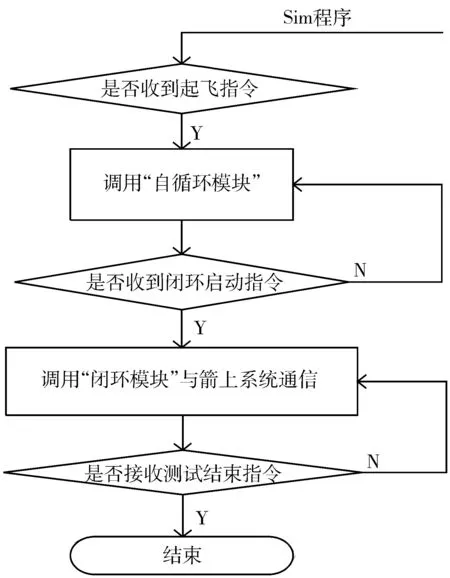
图5 地面仿真流程图
箭上根据飞行时间向地面发送飞行状态标志,进入闭环设置为进入迭代制导的同一时刻Ts。地面根据收到的状态进入相应的仿真模块:当收到起飞指令时调用仿真自循环模块;当收到闭环指令时,停止调用自循环模块,转为闭环模块与箭上通信;当收到测试结束指令时,闭环总检查测试也就结束了。
2.4 箭地软件的设计
飞行软件每个20ms中断的操作内容顺序是固定的,地面仿真模型要与箭上通信,就只有利用飞行软件每周期操作内的间隙来执行闭环模块调用任务。
本方案所设计的闭环模块调用开始后的时间数据流如图6所示。从闭环启动时刻t0开始,在(t0+5)ms时箭机将录取到的舵偏角、时间及指令信息储存于通信邮箱中待地面接收;地面收到邮箱传下来的信息后调用箭体运动模型,然后将计算出的脉冲和导航信息传至通信邮箱;(t0+16)ms时箭上从通信邮箱中取走脉冲信号进行导航制导姿态计算出舵偏供下一周期使用。下一周期同样按照上述顺序操作,直到模飞测试结束。
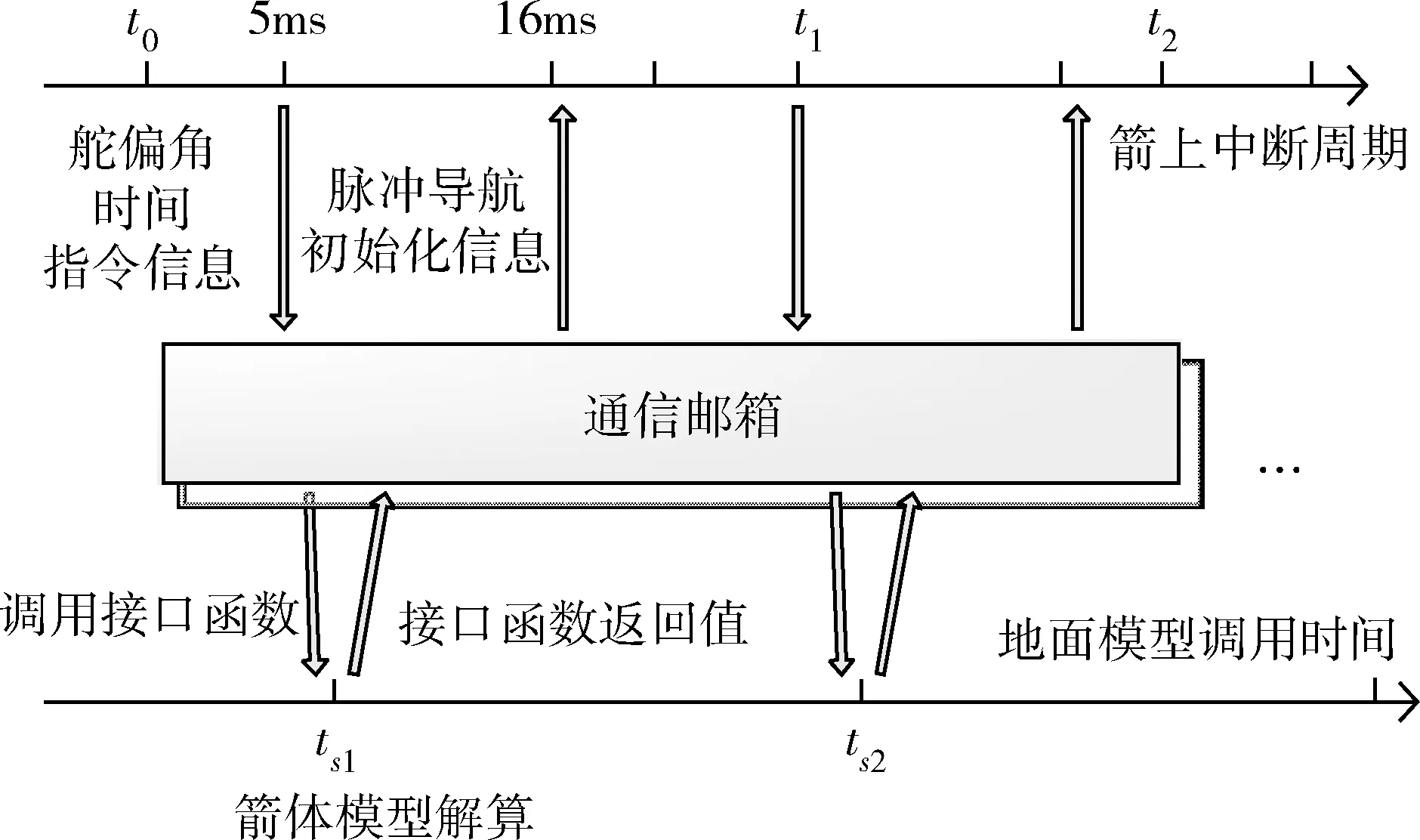
图6 闭环时间数据流图
按照方案设计的数据调用顺序以及对惯性器件的检查,地面和箭上软件需进行针对性的设计。从图6中可以看出,箭上是先发送数据后接收数据,而地面软件则是先收再发,箭地软件的收发数据都要增加,在箭地面的通信协议里增加交互数据。
地面软件还涉及到将较高优先级的BMU内的自动监控改为通信邮箱、添加Sim仿真程序等。箭上的飞行控制软件需要把原有迭代制导模拟飞行段导航的替换数据改为地面仿真脉冲值与真实惯组值之和。由于地面模飞和真实飞行实验的飞行控制软件代码是一致的,而飞行状态是不需要仿真脉冲值的,为避免因以上情况导致飞行状态下出现故障,可设置相应的诸元区分。在模飞条件下,箭机同时取惯组真实和模拟值;在真实飞行条件下,箭机取惯组的真实值。这样即使因某故障跳转到模飞分支,也能将惯组之外的输入信号有效切除。
3 实验验证及结果分析
通过对以上闭环总检查实验方案的研究,以某新型号火箭的控制系统综合实验为基础建立了上述测试平台系统,来验证闭环总检查测试系统的测试有效性和覆盖性。
平台建立步骤如下:1)建立火箭六自由度运动模型(火箭二级启动后才进入迭代飞行段,所以为简化模型,只建立针对火箭二级段的运动模型)、惯组误差模型等相关模型为Sim程序;2)将程序置于地面测发控系统中,修改箭地软件;3)进行调试。
调试成功的标志是模型的仿真姿态角sim、箭上程序角ref和箭上导航解算姿态角ctrl一致,俯仰通道如图7所示。平台验证了方案的可行性,标准状态下闭环模飞段轴向视加速度曲线如图8,从图中可以看出在400多秒时测试由开环状态转为闭环。

图7 标准状态下箭地俯仰角

图8 火箭轴向视加速度曲线
3.1 火箭模型参数的检查
为验证系统对模型参数测试的有效性,进行了惯组标定值加误差实验。在零干扰的标准状态下火箭按照程序角飞行,姿态角与程序角一致,这说明地面仿真软件和箭上软件使用的模型参数是一致的。
图9是在仿真模型的惯组标定数据加入一定误差的试验结果,可以看出箭上姿态角和地面仿真姿态角出现了明显偏离,而且随着时间的增加偏离越来越大。所以在地面模型惯组标定值正确的情况下,可以通过此方法来判断箭上惯组标定值的准确性。同理,其他的箭上模型参数也可以通过闭环的测试检查出来。以上实验对模型参数的检查是基于飞控软件和仿真软件均正常的假设下开展的。
3.2 箭上制导控制算法适应性的检查
本方案还可用于飞行软件迭代制导方法的系统级检查,尤其是对算法的适应性检验。本次实验为验证迭代算法对故障状态的适应性,在地面模型加入故障,设置500s时刻发动机总推力发生突变,减小25%的故障状态。在故障点由于推重比发生突变,迭代制导重新计算的最优弹道发生变化,这从图10可以看出,“STD”代表标准弹道程序角,“Interative”表示故障状态下的迭代程序角。表1分别是火箭无扰动的标准状态和故障干扰状态下火箭的入轨精度对比。从实验结果可以看出,大扰动情况下火箭的入轨点参数偏差仍在要求范围内,且接近于标准下的火箭入轨点参数偏差。这表明即使在大干扰下迭代算法也能保持较高的制导精度,验证了迭代制导算法对大干扰的适应性。

图10 故障状态下迭代程序角

表1 不同状态下的入轨根数偏差
表1中,Δi为轨道倾角偏差;ΔΩ为轨道升交点经度偏差;Δω为轨道近地点幅角偏差;Δa为轨道半长轴偏差;Δe为轨道偏心率偏差。
在地面仿真软件中还可以加入箭体模型的各种偏差和干扰,例如目标轨道临时调整、发动机结构干扰和各种故障模式等,从而考核箭上控制算法的适应性,增加系统级总检查测试的覆盖性,其余试验结果不再介绍。
4 结束语
新型火箭的服役对总检查模拟飞行提出了新的更高的要求。本文提出的适应总检查特点的闭环模飞测试方案,适用于具有BMU以及高速箭地串行总线LVDS(或是更高速的箭地通讯线)的火箭型号,可移植性强。闭环后的总检查模飞更接近火箭在实际飞行中的状态,更好地满足了地面测试的有效性和覆盖性。针对所提出的方案,先是介绍和论述了方案提出的必要性、原理以及实现的技术支持;然后指出了闭环总检查设计的几项要点;最后以某型号火箭为例建立闭环实验平台,实验表明方案是可行的,同时可增强对系统级测试的有效性和覆盖性。闭环总检查测试可作为控制系统地面测试的一条新技术途径,具有较高的工程应用参考价值。
参 考 文 献
[1] 徐延万.弹道导弹、运载火箭控制系统设计与分析[M].北京:宇航出版社,1989.
[2] 贾沛然,等.远程火箭弹道学[M].长沙:国防科技大学出版社,2009.
[3] 吴杰,等.飞行器定位与导航技术[M].国防科技大学,2010.
猜你喜欢
测控技术(2018年2期)2018-12-09
黑龙江电力(2017年1期)2017-05-17
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
环境科技(2016年5期)2016-11-10
导航定位与授时(2016年4期)2016-03-16
北京航空航天大学学报(2016年4期)2016-02-27
中国惯性技术学报(2015年1期)2015-12-19
导航定位与授时(2015年5期)2015-03-10
系统工程学报(2015年2期)2015-02-28