
基于均匀角点匹配的基础矩阵估计方法
2013-05-14 11:33罗桂娥
网络安全与数据管理 2013年7期
罗桂娥,李 映
(中南大学 信息科学与工程学院,湖南 长沙 410083)
在计算机视觉与图像处理中,基础矩阵(F矩阵)[1-2]可用来表示最基本的对极几何关系,基础矩阵是联系同一场景所拍摄的两幅图像之间的重要桥梁,对基础矩阵F的估计是三维重建、运动估计、摄像机标定、匹配与跟踪的基础[3]。求解基础矩阵时,首先是提取特征点,再对其进行匹配。传统的Harris提取的特征点存在聚簇现象,本文在Harris角点提取中加入了邻近点剔除策略,最终能得到分配较为均匀的匹配特征点对。在使用经典8点法[4]计算基础矩阵时,采用平均值法计算基础矩阵,从而有效提高基础矩阵的精度。
1 角点提取方法
1.1 经典Harris角点检测算法
经典 Harris算子[5]表达式如式(1)所示:

其中,M为亮度自相关矩阵,gx为 x方向梯度,gy为 y方向的梯度,G(s)为高斯模板,R为响应函数,k为默认常数,一般取值为0.04,角点即函数取得局部极大值时的点。
1.2 均匀Harris角点的提取
首先,按经典Harris角点监测算法计算图像中存在角点的R值,将R值从大到小进行排序,选取较大的部分点作为最终的角点。为防止在局部区域出现角点簇拥的现象,本文采用邻近点剔除策略减弱或消除这种方法。具体做法是:选用一个5×5模板对图像进行处理,若在该模板下存在不止一个角点,则只保留R值相对较大的角点。
1.3 角点提取效果对比
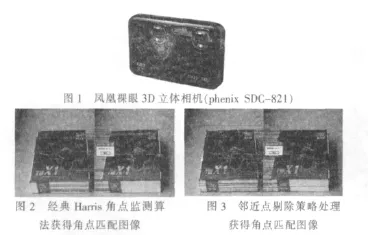
试验中采用凤凰祼眼3D立体相机 (phenix SDC-821)构成双目立体视觉系统,如图1所示。将摄像机所采集到的图像经分离之后得到左右图像。图2是所得图像未进行邻近点剔除所得146对匹配点图像,图3为所得图像通过邻近点剔除所得的138对匹配点图像,明显可以看出图3所获得的匹配角点对分布更为均匀。
2 基础矩阵的计算
加入邻近点剔除策略之后,计算各图像的匹配点对,对其进行分组(每 8对为一组),由 8点算法[6]可求得第i组的基础矩阵Fi,以每组得到的基础矩阵求平均值作为最终值,如式(2)所示:

3 实验结果及其分析
根据上述方法计算基础矩阵,首先对双目系统采集的平面图像进行分割,提取左右摄像机所拍摄的图像;再对灰度化后的平面图像进行Harris角点提取以及邻近点剔除;然后对角点进行匹配,计算出基础矩阵F;最后采用平均余差 (ARE)[3]的方法来计算基础矩阵的精度。基础矩阵F的精度越高,平均余差值越小,如式(3)所示,其中 N为角点匹配数目,Ii,I′i分别为左右图像第i个角点的齐次坐标。

表1是角点匹配点数与8点法和改进8点法求得的平均余差值之间的关系,图4是表1所对应的曲线图,由图4可以看出,改进的8点算法明显比一般8点法的余差值要小,因此,改进的8点法精度更高。
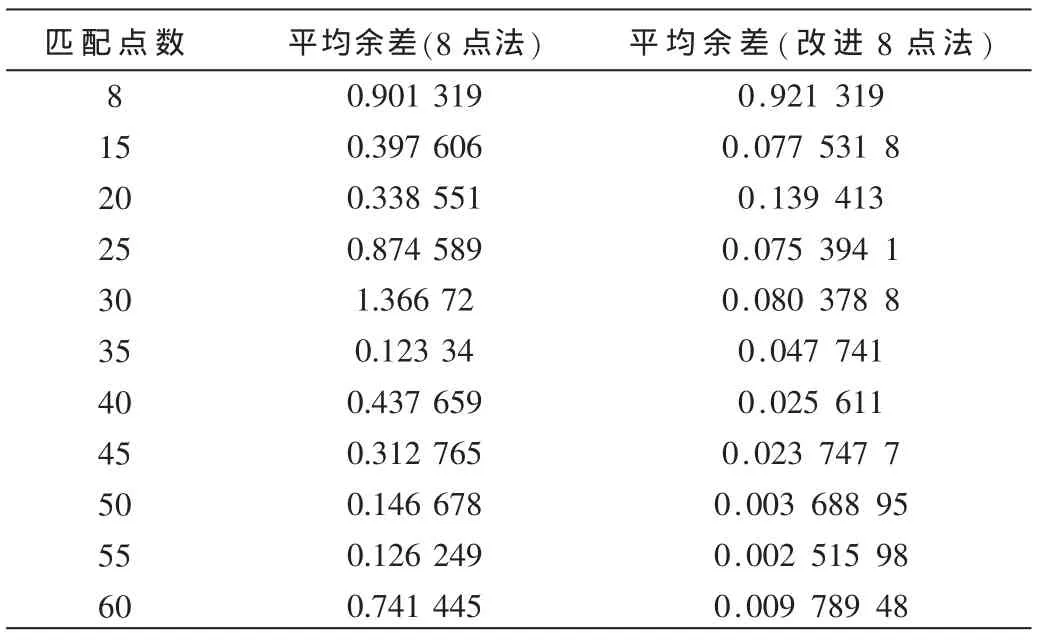
表1 匹配点数与平均余差关系
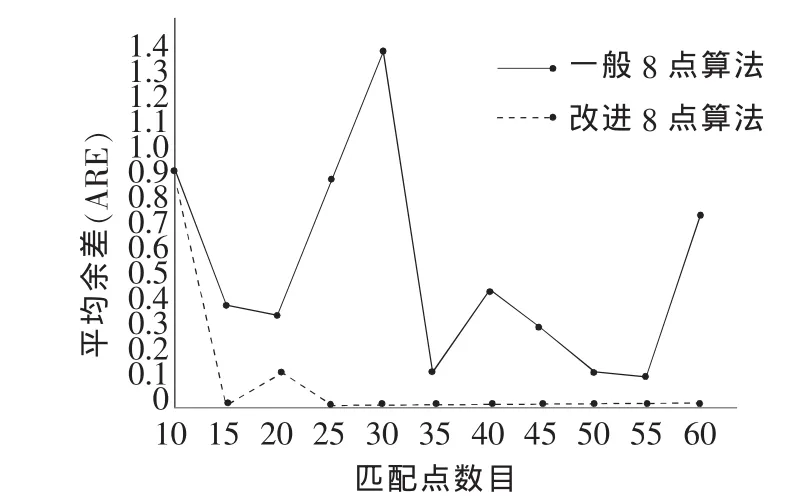
图4 平均余差曲线图
本文对基本矩阵的求解进行了研究,对使用Harris检测算子提取的角点,通过引入邻近点剔除策略从而提取到分布较为均匀的角点。通过对匹配点对进行分组求取基础矩阵,以平均值为最终值能有效的保证基础矩阵F的精度,用平均余差来计算基础矩阵的精度,实验结果表明,采用改进的8点算法对均匀角点求解基础矩阵,其精度可以明显较高。
[1]吴福朝.计算机视觉中的数学方法[M].北京:科学出版社,2008.
[2]陈付幸,王润生.基础矩阵估计的聚类分析算法[J].计算机辅助设计与图形学学报,2005,17(10):2251-2265.
[3]孙亦南,刘伟军,马永壮,等.一种加权计算基础矩阵的高精度算法[J].计算机工程,2005,31(15):186-188.
[4]Longuet-Higgins H C.A computer algorithm for reconstructing a scene from two projections[J].Nature, 1981, 293(9):133-135.
[5]刘忠红,储珺.特征提取与模板匹配结合的图像拼接方法[J].微计算机信息,2010,1:117-118.
[6]HARTLEY R.In Defense of the 8-point Algorithm[J].In:Grimson E (Ed.), Proceedings of the 5thInternational Conference on Computer Vision, Cambridge: IEEE Computer Science Press, 1995: 1064-1070.
猜你喜欢
高师理科学刊(2020年2期)2020-11-26
电子技术与软件工程(2018年10期)2018-07-16
中成药(2017年6期)2017-06-13
中国公共安全(2017年11期)2017-02-06
电子科技(2016年12期)2016-12-26
办公自动化(2016年18期)2016-12-17
系统工程与电子技术(2016年4期)2016-08-24
新闻前哨(2015年2期)2015-03-11
自然资源遥感(2012年4期)2012-12-27
中国钢铁业(2012年11期)2012-08-22
