炭黑/硅橡胶导电复合薄膜传感特性研究*
2013-04-27 01:34:08周国庆王英杰
传感技术学报 2013年8期
廖 波,周国庆,王英杰
(1.浙江工商大学技术与工程管理系,杭州310018;2.中国矿业大学深部岩土力学与地下工程国家重点实验室,江苏徐州221008)
炭黑填充硅橡胶基导电复合材料具有优良的力敏、热敏传感特性,在机器人柔性触觉传感器、大应变拉伸测试传感器、压力传感器及温度传感器等方面都具有开发的价值[1-6]。
Wang等对炭黑充填硅橡胶基复合材料的压阻特性进行了较为系统的研究,分析了炭黑含量对压阻性的影响[1],研究发现炭黑含量不同时导电复合材料表现出完全不同的压阻特性;压缩试验发现复合材料存在电阻松弛与蠕变现象,并认为硅橡胶基体本身的粘弹性是导致电阻松弛与蠕变的主要原因[7],复合材料受压循环及预压力对压阻性有不同影响[8]。黄英团队基于柔性触觉传感器的开发对炭黑填充导电橡胶开展了大量的研究工作,主要包括压力传感器非线性特性[5]、力敏与温度传感器力敏系数[3-4]、电阻-温度模型[9]、力学灵敏度[10]等。周国庆团队利用炭黑与碳纤维填充的橡胶基导电复合材料开发了加筋带变形测试传感器[11],并在工程中获得了应用[6]。另外,王鹏、吴菊英等对炭黑/橡胶导电复合材料力敏特性方面也进行了理论与试验方面的研究[12-14]。
上述研究中,对炭黑/橡胶导电复合材料的基础特性研究及传感器开发研究均是采用块状或片状试样。本文以炭黑/硅橡胶导电复合薄膜试样作为研究对象(厚度约为0.1mm),对其进行拉伸/压缩敏感及温度敏感特性试验研究,发现薄膜结构试样具有更优越的传感特性。
1 试验
1.1 原材料及薄膜试样制备
硅橡胶选用107室温硫化型液体硅橡胶;导电填料选用导电炭黑(ECP-CB-1);将炭黑颗粒加入含有硅烷偶联剂的溶剂中进行机械搅拌并超声分散,得到纳米材料分散液;再将纳米材料分散液与液体硅橡胶机械混合搅拌,均匀后加入固化剂并注入含有预先布置铜丝网电极的模具,固化成型后便可获得薄膜试样,如图1所示,试样尺寸60 mm×10 mm×0.1 mm。

图1 试样照片
1.2 测试方法
对上述制作的薄膜试样进行拉伸与压缩试验,测试其传感特性。其中试样的电阻值由DateTaker800数据采集仪测试,其电阻测试范围为0~100 kΩ;拉伸试验利用自制的拉力试验机,在恒温恒湿机中进行,如图2所示;由于压力需求,压缩试验在伺服控制万能材料试验机(TY8000型)上进行;利用恒温恒湿机控温进行温度试验。

图2 恒温恒湿机与小型力学试验机
2 试验结果
2.1 拉伸敏感性试验
对炭黑/硅橡胶复合材料薄膜试样力敏性研究包括拉伸与压缩敏感性,首先研究拉伸-电阻特性。对薄膜试样在长度方向上进行拉伸试验并测量实时的电阻值,得到各试样电阻与拉伸应变之间的关系曲线,这里仅以C16(炭黑质量分数为16%)试样为例,测试结果如图3所示。图中所示为20℃恒温条件下C16薄膜试样拉伸试验的电阻R-拉伸应变ε曲线,从图中可以看出,试样电阻R随应变ε增大而增大,具有拉伸传感特性。对图中曲线进行线性拟合获得拟合方程为:R=45.21ε+1 605.80(相关系数约等于1),试验曲线近似直线,试样拉伸电阻与应变之间具有近似线性的关系。
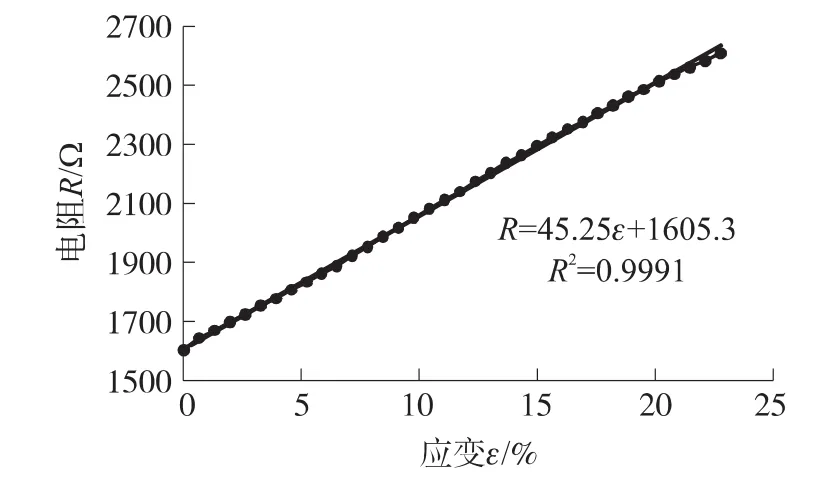
图3 拉伸作用下电阻-应变曲线(20℃,C16)
从图3中还可以看到,最大拉伸应变接近25%,此时试样仍具有较好的线性敏感性。由此可见,这种敏感元件具有测试大应变的能力(普通应变片应变测试范围仅为0.5%左右),在大变形拉伸测试传感器方面具有开发潜力。
2.2 压缩敏感性试验
对薄膜试样进行压缩(压缩方向为其厚度方向),获得试样电阻R与压缩应力σ的关系曲线,图4给出了室内温度约15℃条件下C16试样的电阻R-应力σ曲线。
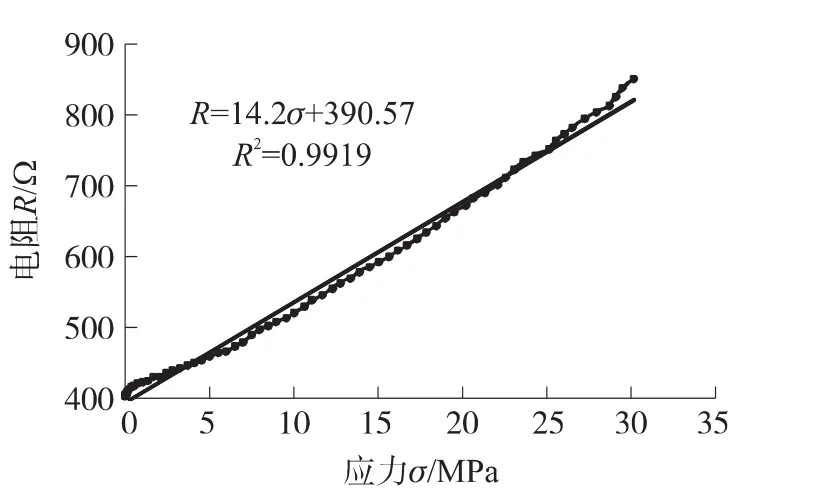
图4 压缩作用下电阻-应力曲线(15℃左右,C16)
从图4可知,随着压力增大试样电阻不断增大,拟合曲线也说明其具有较好的线性关系。试验中,所施加的最大压缩应力达到了30 MPa以上,此时薄膜试样仍具有压-阻敏感特性,这是硅橡胶基复合材料块状或片状试样无法达到的,膜状结构使得这种复合材料具有了更宽的压力测试量程。厚度为92 μm的C16试样,受压时薄膜在厚度方向上的变形必小于此厚度,所以它比普通压力盒压力测试时产生的变形量(大于0.1 mm)要小,使用薄膜元件进行压力测量其压缩变形将进一步减小。
2.3 温度敏感性试验
在热荷载下,薄膜试样同样具有优良的温度敏感特性,图5所示为C16试样在温度变化过程中的电阻-时间曲线。从图中可以看出,随着温度的降低,试样电阻也随之降低,且两者趋势基本一致。
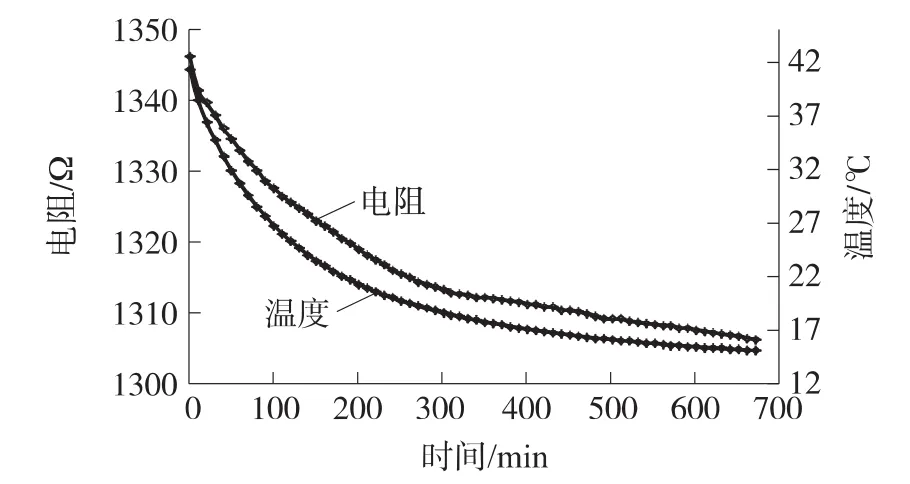
图5 温度作用下电阻及温度关于时间的曲线(C16,无外力荷载)
图3至图5的测试结果表明,炭黑/硅橡胶复合材料制作的薄膜试样,同时具有较优良的拉力-电阻、压力-电阻与温度-电阻敏感特性,具有研发传感器的潜力。
3 传感特性分析
目前,关于填充型导电聚合物复合材料的导电传感机理尚没有统一的理论。Wang等在对炭黑填充硅橡胶基复合材料的压-阻特性研究中,以隧道效应理论为基础建立了导电压-阻模型[1]:
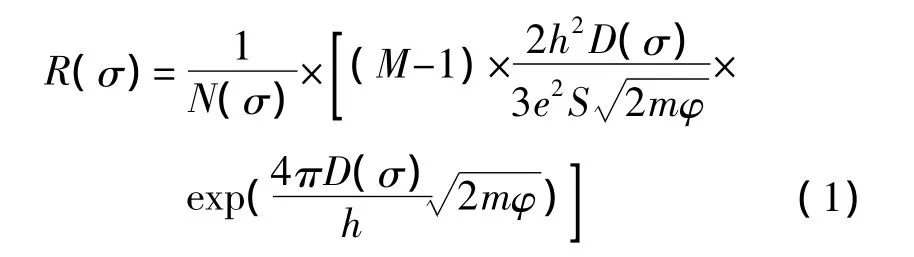
式中h为普朗克常数;m、e为电子质量和带电量;φ为势垒高度;S为有效隧道通道平均截面积;N与D分别为有效导电通路数目和导电粒子间隙,都是关于应力σ的函数;M为一条有效导电通路上的平均导电颗粒数目。此模型较好的解释了试验获得的压-阻特性。
本文薄膜试样两端的电极厚度与薄膜的厚度近似,可对试样建立一维结构的导电通道模型。如图6所示,炭黑颗粒在薄膜长度方向上通过相互接触与隧道效应两种导电模式形成导电通路,使得复合材料具有导电性。在此导电模型基础上,对其传感特性进行分析。

图6 导电通道模型
3.1 拉伸敏感性
当薄膜试样受到拉力后,在长度方向上产生伸长变形,电极之间炭黑颗粒组成的导电网络将受到扰动,如图7所示。此扰动主要表现在:(1)部分初始状态相互接触的炭黑颗粒受到拉伸后不再接触或转为隧道效应导电;(2)部分初始状态依靠隧道效应导电的炭黑颗粒之间的隧道间距ω变大,以致隧道电阻变大或失去隧道效应变为断路状态。以上两种扰动的综合结果均为总电阻将随拉伸形变增大而不断增大。

图7 材料受到拉伸变形
根据式(1)可知,随着拉伸应变(应力)的增大,薄膜试样长度方向的有效导电通路数目N将减小,导电粒子间隙D将增大,最终使得试样的总电阻R增大。
3.2 压缩敏感性
同理,当薄膜试样在厚度方向受到压力产生压缩变形后,在长度方向上将产生类似拉伸试验中的伸长变形(橡胶的泊松比在0.49左右),如图8所示。在电极之间的导电通路方向上,颗粒之间的间距同样变大,有效导电通路数目也将减小,由式(1)及上述关于扰动的分析可知,试样总电阻R也将随压力的增大而增大。
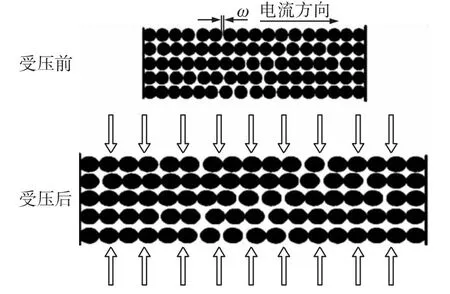
图8 薄膜受压模型图
上述分析可知,拉伸和压缩试验对试样电极之间的导电通路的最终效果是一致的,炭黑颗粒之间的间距都将随荷载(包括拉力与压力)的增大而增大,总电阻都将随拉力或压力的增大而增大,从而表现出图3与图4的力敏传感特性结果。
3.3 温度敏感性
橡胶材料热膨胀系数约为 210×10-6K-1,薄膜试样的体积将随温度的升高而产生膨胀,反之收缩。对于依靠隧道效应导电的炭黑颗粒,它们之间都有一层薄薄的橡胶基体材料,当温度变化后,这层橡胶材料将产生膨胀或收缩,导致隧道间距改变。同样,橡胶材料的热胀冷缩也会引起试样整体的形变,对相互接触的炭黑颗粒也将产生影响,导电网络出现扰动,从而使得薄膜试样表现出温度-敏感特性。如图5所示,温度降低时橡胶基体材料产生收缩变形,这有利于材料结构中导电通路的建立,使得试样总电阻R降低。
4 结论
(1)利用溶剂法工艺制备了炭黑/硅橡胶导电复合材料薄膜,对其进行了力敏与热敏特性试验研究。
(2)力敏试验结果表明,复合薄膜具有优良的拉伸/压缩敏感特性,试样电阻随拉伸变形或压力的增大而不断增大,其电阻与应力(应变)之间都具有良好的线性关系。复合薄膜具有较宽的检测范围,拉伸应变测试范围可达到25%,压力可达30 MPa。
(3)导电复合薄膜对温度的变化具有较好的敏感特性,其电阻随温度的降低而减小,且变化趋势基本一致。
(4)本文制作的炭黑/硅橡胶复合材料薄膜元件,由于其结构本身特有的尺度特性,可满足更大应变的拉伸变形测试,更宽应力范围的压力测试,且具有较好的线性度,这将有利于以此为基础的传感器研发及应用。
[1] Wang Luheng,Ding Tianhuai,Wang Peng.Influence of Carbon Black Concentration on Piezoresistivity for Carbon-Black-Filled Silicone Rubber Composite[J].Carbon,2009,47:3151-3157.
[2] 徐菲.基于力敏导电橡胶的新型三维力柔性触觉传感器仿真研究[J].传感技术学报,2012,25(3):359-364.
[3] 黄英,刘平,廉超,等.炭黑填充导电橡胶的温度传感器灵敏系数[J].复合材料学报,2012,29(3):30-35.
[4] 刘平,黄英,廉超,等.炭黑填充导电橡胶的力敏传感器灵敏系数[J].复合材料学报,2012,29(1):16-20.
[5] 刘平,黄英,廉超,等.基于炭黑填充导电橡胶的压力传感器非线性特性[J].高分子材料科学与工程,2012,28(8):72-75.
[6] 廖波,周国庆,赵光思,等.胶基电敏复合材料传感技术实测加筋土墙的变形[J].煤炭学报,2012,37(2):221-225.
[7] Wang Luheng,Ma Fangfang,Shi Qaianshu,et al.Study on Compressive Resistance Creep and Recovery of Flexible Pressure Sensitive Material Based on Carbon Black Filled Silicone Rubber Composite[J].Sensors and Actuators A:Physical,2010.
[8] Wang Luheng,Ding Tianhuai,Wang Peng.Effects of Compression Cycles and Precompression Pressure on the Repeatability of Piezoresistivity for Carbon Black-Filled Silicone Rubber Composite[J].Journal of Polymer Science:Part B:Polymer Physics,2008(46):1050-1061.
[9] 刘平,黄英,廉超,等.柔性触觉传感器用温度敏感导电橡胶的电阻-温度模型[J].高分子材料科学与工程,2012,28(6):107-109.
[10]黄英,刘平,黄钰,等.柔性触觉传感器用力敏导电橡胶力学灵敏度研究[J].复旦学报(自然科学版),2009,48(1):46-57.
[11]周国庆,廖波,赵光思,等.一种加筋带变形测试装置及其测试方法[P].中国专利:ZL200910029083.6,2009-1-19.
[12]王鹏,丁天怀,徐峰,等.炭黑/硅橡胶复合材料的压阻特性及改进[J].传感技术学报,2004(1):15-18.
[13]王鹏,丁天怀,徐峰,等.炭黑填充型导电复合材料的压阻计算模型及实验验证[J].复合材料学报,2004,21(6):34-38.
[14]吴菊英,黄渝鸿,范敬辉,等.炭黑/橡胶力敏复合材料压阻特性研究[J].橡胶工业,2010,57:34-38.
猜你喜欢
中国测试(2018年10期)2018-11-17 01:58:42
橡胶科技(2018年4期)2018-02-17 06:08:42
大连工业大学学报(2015年4期)2015-12-11 04:06:50
智能建筑电气技术(2015年5期)2015-12-10 05:52:23
橡胶工业(2015年8期)2015-07-29 09:22:46
橡胶工业(2015年6期)2015-07-29 09:20:48
真空与低温(2015年4期)2015-06-18 10:47:22
发明与创新(2015年30期)2015-02-27 10:39:51
橡胶科技(2015年3期)2015-02-26 14:45:02
橡胶科技(2015年5期)2015-02-24 04:57:57