基于虚拟仪器的高频角振动测试系统研制
2013-04-26 09:33陈璐
计测技术 2013年2期
陈璐
(中航工业北京长城计量测试技术研究所,北京100095)
0 引言
角振动传感器在航空、航天、舰船及兵器等领域均有重要的应用。在对传感器进行动态校准,或进行反馈控制中,需要同时准确获取幅频特性和相频特性参数时,角振动传感器的精准溯源显得尤为重要[1]。
为保证这些角振动传感器的研制与生产,提高其技术指标的测量准确度,建立可实现量值溯源的绝对法测试系统具有重要意义[2]。目前国家或国防最高计量标准中都不包含角振动量,实际使用中的角振动量无法进行量值溯源。国内现有角振动台的研制水平,与最高计量标准对角振动台的要求还有一些距离,而且由于传感器的动态特性要求比实际测试设备的工作频率范围要超出400 Hz,甚至600 Hz,另外惯性器件也正在朝高频响、小型化的方向发展,这就需要我们对角振动台的频率范围提出更高的要求。
高频角振动测试系统基于高频激光测速仪的设计原理,以平面光栅为合作目标,采用激光多普勒动态参数测量方法和光栅差动式激光干涉技术,复现角振动量值,并直接溯源于长度和时间,从根本上解决了普通激光干涉仪测量固体表面横向运动时不可避免的多普勒信号的随机相位效应,并提高了多普勒信号的信噪比。传统的角振动测试系统需要对信号发生设备、激励设备及各种传感器件等多个仪器进行操控,步骤繁琐,费时费力,整个系统体积大、自动化程度低、不便于设备升级。
虚拟仪器技术利用高性能的模块化硬件,结合高效、灵活的软件来完成各种测试、测量和自动化的应用。具有如下特点:①集成度高、体积小 (虚拟仪器使用计算机软件完成大部分数据分析和处理功能,省去了大量的硬件,避免了显示和存储硬件的重复投资,大大减小了体积和重量);②配置灵活,便于维护、扩展和升级 (由于虚拟仪器系统的主要功能由软件完成,用户可以根据需求量身订制,便于升级,大大延长了仪器的技术寿命);③开放性、模块化 (虚拟仪器硬件体系结构由主机箱、控制器、各种外围功能模块组成。用户可根据需要自由地构建硬件系统);④自动化程度高 (虚拟仪器中,测试任务的调度,数据的采集、分析、处理、存储和输出都可自动完成,大大降低人工处理数据中的错误率)。
在本文所阐述的基于虚拟仪器的高频角振动测量系统中,将传统角振动测量系统的激励源发生与控制,振动台状态监测,包括气压、温度、电压、电流等参数的监测都集中由虚拟仪器软件进行控制,简化了测量步骤,节省了人力,从而提高了工作效率,缩短了测量时间。
本文主要介绍高频角振动测量系统设计,对光栅信号处理算法进行重点研究,介绍了测量系统中虚拟仪器技术的应用,并对测量系统进行能力验证[3]。
1 高频角振动测量系统
高频角振动测量系统结构框图,如图1所示。传感器安装在角振动台的台面上,由信号源产生不同频率和幅值的电压信号通过控制器控制功率放大器来驱动角振动台,角振动台将以某一给定的频率和振幅产生正弦角运动。校准过程中,标准传感器与被校传感器同时安装在角振动台的台面上 (比较法测量)或直接采用角振动台的角度测量元件的输出信号为标准信号 (绝对法测量)进行测量。
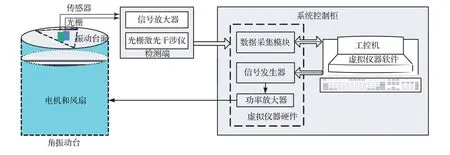
图1 高频角振动测量系统结构框图
硬件部分主要包括光栅激光干涉仪、信号放大器、角振动台和系统控制柜。其中,光栅激光干涉仪主要用来测量标准信号,将角振动量值直接溯源到长度量值;角振动台作为激励系统;系统控制柜则包含了数据采集、信号发生器和功率放大器,这部分集成了整个系统的核心设备,即虚拟仪器硬件。高频角振动测试系统设备实物图如图2所示。

图2 高频角振动测试系统设备
在高频角振动测量系统中,光栅信号的解调处理、降低波形失真是系统设计中的关键技术,也是本系统中借助虚拟仪器技术重点研究的对象。
高等职业院校要有教师信息能力和素养提升与发展的平台,通过高等职业院校数字化资源的利用建立起教师信息化和数字化培养与发展体系,使教师通过数字化、信息化平台认知大数据技术,熟练掌握高等职业院校教育教学中应该具备的能力和方法,真正能够利用大数据成果更好地整合现有的高等职业院校教育教学资源,形成独特的教育教学风格以适应高等职业院校改革教育的自身发展的需要。
2 信号处理方法
2.1 光栅信号解调
在图1中,光栅输出两路相位差为π/2电信号,经信号调理器放大后可以表示为

式中:h和k表示直流分量;a和b表示交流分量的幅值;φ表示两路信号的相位。
当光栅运动时,相位随之变化,Ux和Uy的交流分量按正弦规律变化并且两者的相位差为π/2。如果将Ux和Uy输出至示波器的x和y轴,将会产生一个旋转矢量,形成李萨育圆。旋转矢量每旋转一周代表相位变化2π,对应的被测目标角位移为λ/2(λ为光栅栅距,此处为1200线/mm),角位移和电信号的相位关系可表示为

经过调整光路及信号调理器,可使交流分量的幅值相等,通过滤波去除直流分量,此时两路正交信号的相位可以表示为

Ux和Uy信号被数据采集系统数字化后形成2个离散信号系列 Ux[n],Uy[n]。被测目标的位移 s[n]可通过下式计算:

由式 (5)中位移随时间变化的离散时间系列数据,可以计算出被测目标的角位移、角速度、角加速度。
公式中的k的计算是非常重要的。正交信号的相位变化如图3所示,A,B,C,D,E是数据采样点,当光信号的相位增加时,采样到的信号按从A至E的时间顺序变化,在A向B点过渡时以及D向E点过渡时,k加1;反之,当光信号相位减少时,信号相位从E至A减少,在E向D过渡及B向A过渡时,k减1。在计算过程中反正切计算值取主值区间-0.5π至0.5π。k值变化可以简单地确定,当信号相位从-0.5π向0.5π变化时,假定数据采集系统至少采集到3个点(图中的 B,C,D),各相邻点间的相位变化小于0.5π,如果相邻点间的相位变化大于0.5π,那就意味着k发生了变化,当相邻点间相位变化Δθ>0.5π时,k加1,当Δθ< -0.5π,k减1。

图3 正交信号相位展开图
软件框图程序,如图4所示。

图4 光栅信号解调处理软件框图
2.2 降低波形失真
2.2.1 信号非线性补偿
由于各种干扰的存在,导致两路测量的光电信号存在一个相位差,其输出电压表达式为

式中:δ为正交信号相位偏差。这种非线性的直观表示就是李萨育图形不再是圆,而是椭圆。综合上两式,可获得椭圆方程

式中:B,C,D,E,F为椭圆方程系数。
已知数据采集系统获得的Ux和Uy系列,可以采样最小二乘法拟和出椭圆方程的系数,进而由B,C,D,E,F计算出h,k,a,b及δ。采用下式进行非线性补偿 (椭圆修正)后获得正交信号的相位:

非线性补偿的过程不可能完全实时进行,一般要先测量一定量的数据计算出椭圆方程的系数,然后进行修正。当测量系统的椭圆方程系数在某个测量条件下保持不变时,可以实时进行非线性修正。图5为Ux和Uy系列进行非线性补偿前和补偿后的李萨育图形。
2.2.2 去干扰信号
对于干扰信号,由于其来源不同,其表现形式也多种多样,本文针对系统中存在的两种典型的干扰信号 (调频干扰信号和周期性干扰信号)进行滤波处理。调频干扰信号时域表达式为

图5 光栅信号的李萨育图形

式中:Uj为调频干扰信号的幅度;ωj为调频干扰信号的中心频率;kfm为调频斜率。在去除此类型干扰信号的过程中,首先将正弦信号按整周期进行分解,分别求取调频干扰信号的中心频率和调频斜率,从而拟合出干扰信号,再逐一从有用正弦信号中减掉干扰信号成分,即实现滤波。系统中,信号频率fn小于等于50 Hz时,采用此法进行滤波处理。其滤波前后的效果如图6所示。其中浅色部分为滤波后的有用信号,深色部分为滤波前混有噪声的信号。
图6 调频干扰信号滤波前后的效果图
对于周期性干扰信号,滤波过程相对简单,本文采用巴特沃斯低通滤波器实现滤波,并利用相位补偿方法弥补由于滤波带来的相位损失。测量系统中,信号频率fn大于50 Hz时,采用此法进行滤波处理。其滤波前后的效果如图7所示。
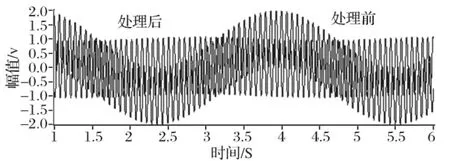
图7 周期干扰信号滤波前后的效果图
3 高频角振动测量系统的虚拟仪器软件
高频角振动测试系统软件针对光栅式外差激光干涉仪角振动校准装置设计而成,主要用于对角加速度传感器、角位移传感器和角速度传感器的测试与校准。整个软件由硬件驱动模块、数据处理模块以及数据管理模块三个功能模块构成。测量系统计算机控制界面如图8所示。
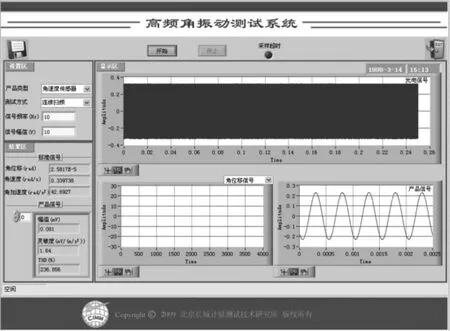
图8 高频角振动测量系统软件界面
硬件驱动模块包括系统参数设置、信号源控制和数据采集控制等。可实现对NI6115两个模拟输入通道的控制,NI6220多个模拟输入通道的控制,以及通过GPIB接口实现对Tektronix AFG3022B信号源的控制。
数据处理模块实现光电信号的解调和测试结果的处理,包括信号解调、滤波处理等算法。
数据管理模块实现了数据保存、打印等功能。数据保存包括原始数据和波形图片的保存,并能够通过打印的方式将结果输出。
本测试系统软件主程序流程如图9所示。测试系统支持单频率和扫频两种模式的信号源。
本系统通过虚拟仪器技术实现对仪器硬件的控制,能够根据用户的设置产生不同频率和幅值的正弦波、三角波、方波等信号,即单一频率控制;也能够根据用户设置的起始/终止频率、扫频时间和信号幅值等参数,产生幅值不变,信号频率在一定频率范围内进行线性变化的扫频信号。
通过硬件的GPIB接口和相应的控制指令及语法,可以通过系统的虚拟仪器软件设置仪器硬件的输出。一般控制指令包括设置指令和查询指令,前者可以用来改变仪器的某些参数或执行一些特殊的操作;通过后者则可以获取仪器的某些状态信息或仪器的一些数据。
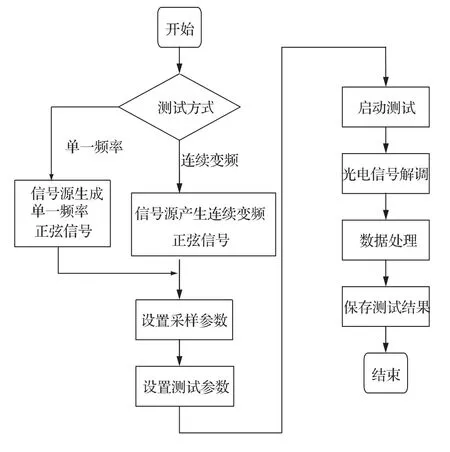
图9 测试系统软件流程图
本系统的虚拟仪器硬件是Tektronix AFG3022B,软件设计中利用虚拟仪器软件结构即VISA接口对硬件进行控制。首先,在LabVIEW平台下,通过VISA Find Resource()和VISA Open()函数获取硬件资源并打开一个与仪器的对话,这里资源名称为“GPIB0::11::INSTR”,然后按照指令结构编辑各种指令,利用VISA库中的VISA Write()和VISA Read()函数实现与仪器设备的对话即完成各种控制操作,最后通过VISA Close()函数关闭此次对话并清空缓存释放资源。
4 高频角振动测量系统能力测试
在系统角振动台面上安装某型号陀螺,作为被校对象,其输出信号即被校通道输出,将光栅激光干涉仪信号解调结果作为标准通道的输出,设置不同的振动频率和幅值进行能力测试,其位移失真度控制在3%以内,系统测试结果以及标准偏差如表1所示。
从试验数据可以看出,在允许的失真度范围内,系统完全能够实现10~700 Hz频率范围内的测量,角加速度测量偏差能控制在5%以内,位移失真度最大不超过2.5%。
5 结论
本文研制的基于虚拟仪器的高频角振动测试系统,在实现了对角振动量的绝对法测量的基础上,又进一步提高了测量系统的自动化程度,扩大了能力范围。基于虚拟仪器的高频角振动测试系统的成功研制保证了陀螺性能指标的准确性测试,加快了陀螺研究和生产的步伐,同时也为我所对陀螺的研制和应用提供了有力的计量保障和动态测试手段,具有较大的社会效益和实用价值。

表1 高频角振动测量和系统的测试结果以及标准偏差
[1]谢列金.激光陀螺及其应用 [M].北京:航空工业出版社,1992.
[2]姜亚南.环形激光陀螺仪 [M].北京:清华大学出版社,1985.
[3] CHEN Lu,LI Xinliang,ZHANG Dazhi.Virtual Instrument Based High Frequency Angular Vibration Testing System [A].Proceedings of CIMM-PTB SEMINAR ON DYNAMIC MEASUREMENTS AND NANOMETROLOGY[C].北京:2011.
[4] LabVIEW Manual[Z].2010.
[5] Uchiyama N.Takagi S.Sano S.Design of discrete-time adaptive repetitive controllers and application to feed drive systems[J].Journal of Systems and Control Engineering,2007,221(1):39-47.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
电气技术(2021年3期)2021-03-26
通信电源技术(2020年22期)2020-03-27
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
工业设计(2016年6期)2016-04-17
电源技术(2016年9期)2016-02-27
振动工程学报(2015年1期)2015-03-01
海军航空大学学报(2015年4期)2015-02-27