激光干涉法近场扫描架平面度高精度测量及误差分析
2013-04-26 09:33王宏伟张文雯
计测技术 2013年2期
王宏伟,张文雯
(四川航天计量测试研究所,四川成都610100)
0 引言
近场平面扫描架是带动已知的探头在被测天线的表面上进行扫描的专用装置,在天线平面近场测量系统[1]中起着重要作用。近场平面扫描架Z向平面度测量属于大型非实体平面的平面度测量,本文针对该大型非实体平面的构成特点,运用激光干涉测量直线度原理,参考现有平面度评定方法,对大型非实体平面的平面度高精度测量提出了新的测量方法。
1 扫描平面度测量模型
根据近场平面扫描架的结构 (如图1所示,塔架结构)和运动特点,对扫描架X轴和Y轴所走轨迹在Z向扫描而成的平面,参考现有平面度检定方法[2],运用非封闭网格法布线,将X轴分成等间隔10段,即Y向11个截面,X向1个截面,共12个测量截面,如图2所示。测量时先测X向截面,再依次测量Y向截面在Z向的直线度。考虑到两运动轴的运动特性也将会影响平面度的测量精度,参考定位精度和重复定位精度评定标准[3],12个测量截面正反向行程各测3次,用各测点正反向均值作为各测点直线度误差的估计值。
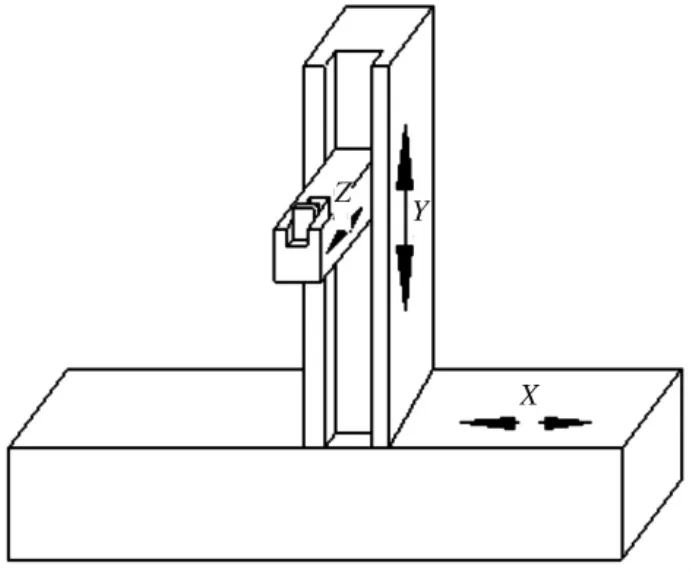
图1 近场平面扫描架示意图
平面度计算采用最小二乘法[4]。首先将各测点直线度误差的估计值进行坐标统一计算,统一后的数据与各测点所在位置即各测点坐标有关,因此可用被测扫描面上各测点坐标求出最小二乘平面方程,采样点的偏差值最高点和最低点到该最小二乘平面距离之和作为平面度误差。
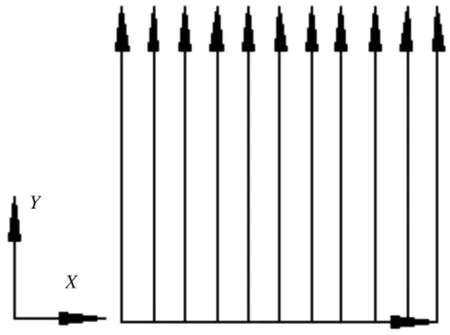
图2 近场平面扫描架XY平面非封闭网格布线
2 测量实现
扫描架扫描平面的平面度测量具有一定的特殊性。首先,与平常实际平面度测量有所不同,所求平面为扫描架水平和垂直运动轴所走轨迹扫描形成的平面,非实体平面;其次,扫描架X轴和Y轴所走轨迹形成的扫描平面较大,为3000 mm×3000 mm;再次,扫描架平面度要求为0.2 mm,需要测量仪器有较大的示值范围,选用双频激光干涉仪及其短程直线度附件为测量设备,其轴向量程达到4.0 m,其直线度示值范围为±2.5 mm,均能满足该项目的测量要求。
用双频激光干涉仪及其短程直线度附件来实现直线度测量,可分为对水平坐标轴 (如图3所示)和对垂直坐标轴 (如图4所示)的直线度测量。

图3 X轴在Z方向上的直线度测量
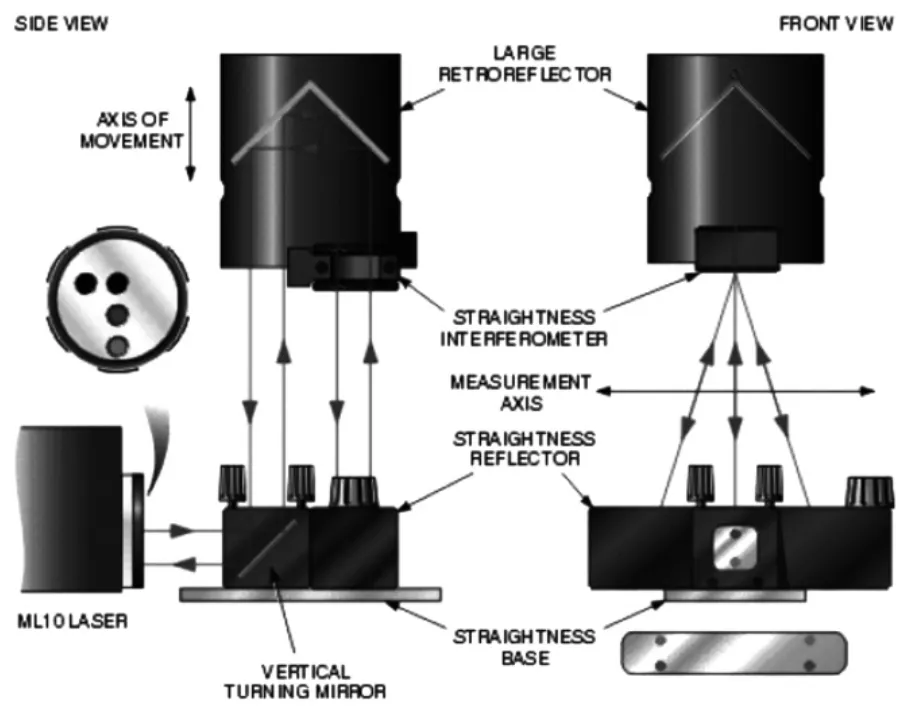
图4 Y轴在Z方向上的直线度测量
3 最小二乘平面方程的数学模型
Z向直线度测量中所得的实测值与各测点位置x,y有关,故实测点数据z看作某函数的因变量,x,y即为函数的两个自变量,则数学模型[5]为

式中:fi,j为相互独立且服从同一正态分布的随机变量,xi,yi,j分别为 x 轴、y 轴对应测点坐标,zi,j为统一坐标后的实测值。写成矩阵形式:

式中:

用最小二乘法估计参数β,设b0,b1,b2分别为参数β0,β1,β2的最小二乘估计,则对应最小二乘方程为

由最小二乘法得
4 数据处理
对测量值统一坐标后的数据如表1所示。
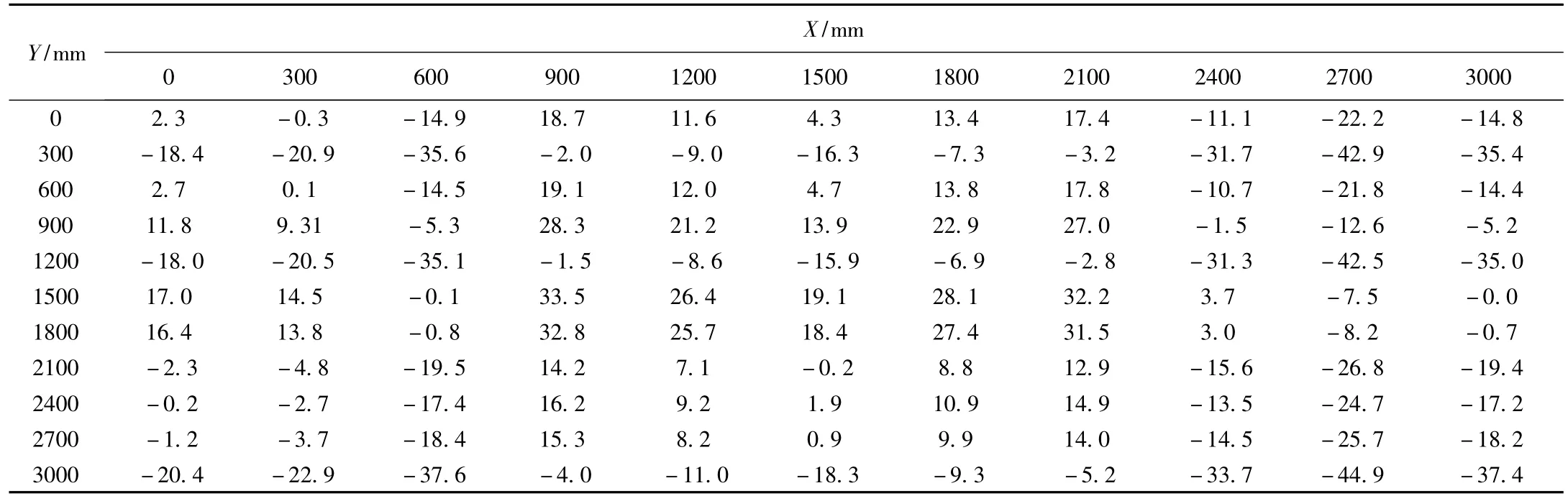
表1 各测点在Z向直线度 μm
由于需处理数据量较大,运用矩阵可简化处理过程,采用MATLAB进行计算并绘出三维图形。经处理,得 b= [6.73, -0.00492, -0.00143]T。
最小二乘平面方程为

各测点到最小二乘平面距离为

为了便于较直观认识扫描架X轴和Y轴所走轨迹扫描而成平面的平面度,运用MATLAB绘出各测量点在Z向相对最小二乘平面的距离,如图5所示。
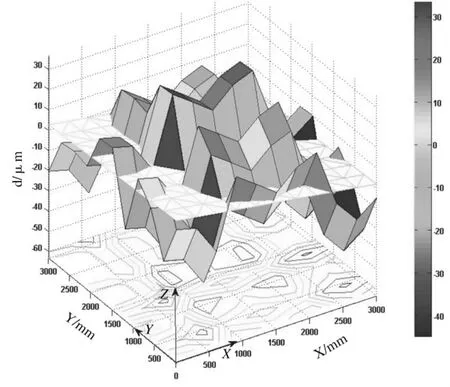
图5 扫描架平面度误差三维图
5 影响直线度误差因素分析
5.1 基准光束准直精度
激光准直精度主要受激光束漂移、光线弯曲和大气扰动三方面制约[6]。激光束漂移,主要表现为平漂和角漂,双频激光直线度测量装置在原理上不受激光束平行漂移的影响[7],同时在实际运用中,也可忽略激光束角漂移的显著影响,即对光束漂移有自适应性。光线弯曲主要由温度、气压和水汽分压影响空气折射率不均匀 (梯度存在)导致。另外,大气湍流的存在,导致局部空气折射率随机变化,从而导致光束随机抖动。对于光线弯曲和大气扰动,通过环境补偿可减小其对测量影响。
5.2 双面反射镜误差对测量影响
双面反射镜误差对测量影响主要体现在平面度误差和双面反射镜左右两边制造误差对直线度测量的影响。双面反射的平面度误差会引起附加光程差,附加光程差将带来被测方向的高低变化量 (约0.6 μm)。
由于直线度反射镜玻璃材料的不均匀性和制造误差[8],反射镜左右两边对光线的作用有着细微的差别,引入了测量误差为±0.15M2μm(M为行程距离)。为了得到更高的精度,在完成第一组测量之后,需要将反射镜旋转180°再重复测量一组数据,将两组数据的均值作为最终的评定结果,这样可抵消反射镜左右两侧的仪器误差。
5.3 斜率误差
斜率误差是由于被测位移轴线和直线度反射镜的光学轴线之间不平行引起,测量数据存在随动镜移动而递增的趋势,斜率误差过大会带来较大的测量误差。为了尽可能消除斜率误差,采用在测量之前多次调准光路使光线轴与被测位移轴线尽可能平行 (调至显示值小于20 μm,调整原理如图6所示),数据分析时再运用数学方法去除残余斜率误差的策略。
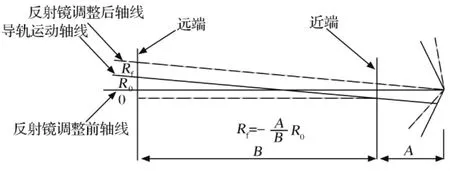
图8 近端清零远端调节反射镜
5.4 导轨运动副的运动误差对直线度测量影响
测量装置在直线度测量过程中,感受器件 (渥拉斯顿棱镜)是靠一磁性座吸在导轨副上沿导轨一起运动,导轨副会带着感受器件一起做6个自由度运动(沿3个轴的平动和绕3个轴的转动,见图7)。对本例测X轴Z向直线度分析,主要受4个因素影响,Y向直线度、绕X轴滚转、绕Y轴偏摆和绕Z轴俯仰。绕Y轴偏摆,若感受器件是渥拉斯顿棱镜,相当于激光束的角漂;绕Z轴俯仰、绕X轴滚转和沿Y向直线度影响相当于激光束平漂影响。渥拉斯顿棱镜对激光束的平漂和角漂具有自适应性,故这4个因素对直线度误差测量影响小 (但对两光束重合度有影响),在实际测量中可忽略。

图7 渥拉斯顿棱镜随导轨副运动示意图
5.5 环境对直线度测量影响
外界环境对直线度测量影响因素主要是空气波动和机械振动。机械振动会增大采样的随机误差,也会使固定激光器的调整机构存在机械位移,造成激光光线缓慢的角度漂移。为了减小随机误差的影响,直线度测量运用长时间取平均值 (4 s内采集4096个顺序读数求平均值并显示结果)。另外,由于直线度测量本质是测量两束光的光程差,影响线性测长的因素仍会对直线度测量结果产生影响,尤其是大量程测量,光束完全分开,有必要对光束引入环境补偿,补偿环境对直线度测量影响。
6 结束语
激光干涉原理测量直线度,属于对直线度的直接测量,是目前精度最高的直线度测量技术,通过对误差分析可知其对光束漂移和导轨运动副的附加运动有自适应性,可实时补偿环境误差,适合在现场使用。
其次,本文提出的平面度测量方法,准确充分地利用全部原始观测数据所提供信息,运用MATLAB软件快速、直观得评定出平面度误差,该方法得出的结果具有无偏性和有效性,有效得解决了大型非实体平面测量问题,测量不确定度达到U=11 μm(k=2)。
另外,本方案对一些专用测量设备的检测有一定的启示作用。按照本方案的这种思路,根据设备运行机理和特点,合理选用测量设备,追溯到当前的通用测量方法,建立测量模型,去完成专用设备的校验。
[1]李清杰,钟鹰.天线平面近场测量系统发展概况 [J],空间电子技术,2001,1:61-64.
[2]国家质量监督检验检疫总局.JJG 117-2005平板 [S].北京:中国计量出版社,2005.
[3] ISO 230 -2:2006(E)Test Code for machine tools—Part 2:Determination of accuracy and repeatability of positioning numerically controlled axes[S].
[4]杜茂华.用回归分析法评定平面度误差 [J].机械,2001,28(2):21-22.
[5]费业泰.误差理论与数据处理 [M].北京:机械工业出版社,2004.
[6]方仲彦,段纯永,梁晋文.高精度激光准直技术的研究(一)[J].航空计测技术,1997,17(1):3-6.
[7]张礅,张斌,冯其波.激光光线漂移抑制与补偿方法综述[J].光学仪器,2006,28(6):89-93.
[8]赵东升,贾敏强,张会庆,等.激光干涉仪测量直线度误差因素分析 [J].计量技术,2010(3):32-35.
猜你喜欢
新能源科技(2022年9期)2022-11-20
计量学报(2022年7期)2022-08-23
环境技术(2020年1期)2020-03-06
物理学报(2018年17期)2018-09-21
科技风(2018年19期)2018-05-14
制造技术与机床(2017年6期)2018-01-19
科技创新与应用(2017年11期)2017-04-27
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
重型机械(2016年1期)2016-03-01