
基于DSP的非量测相机标定技术研究与实现
2013-04-24 05:12:18
计量技术 2013年7期
(1. 61363部队, 西安 710054;2.66444部队,北京 100042)
0 引言
随着微电子和半导体技术的发展,尤其是一些嵌入式微处理器(Micro Processor Unit,简称MPU)的发展,已经能够实现高效、可靠的数据运算,具备了一定的数字图像处理能力[1]。它们不仅具有体积小、功耗低、效率高、集成容易以及性能稳定等特点,而且在工作温度、抗电磁干扰、可靠性等方面相对通用计算机中的CPU都做了各种增强,比如DSP数字信号处理器等[2-3]。
随着普通数码相机的分辨率越来越高、价格越来越便宜,常被应用于数字近景摄影测量、计算机视觉等领域。但是普通数码相机会有一定的畸变,而且这些畸变往往是未知的,因而它们在用于摄影测量之前需要进行相机标定[4]。
DSP是一种高效、可靠的嵌入式微处理器,特别适合于各种数字信号的处理运算。为了验证DSP能够实现相机标定的运算处理以及标定结果的可靠性、稳定性,这里就以它作为数据处理的核心硬件,同时,也为后续开发嵌入式系统奠定基础。本文将DSP技术与相机标定相结合,设计了一种基于DSP的非量测相机标定方法,分别对DSP的开发、相机标定算法的实现过程等进行了深入的研究。
1 基于DSP的相机标定系统的硬件设计
基于DSP的相机标定系统的硬件主要有DSP芯片、计算机、显示器及数据线等,其中DSP芯片是整个系统的核心部件,主要任务是完成相机标定算法,其硬件原理框图如图1所示。

图1 相机标定系统原理框图
本文采用TI公司推出的一款32位高性能浮点TMS320C6713 DSP芯片,如图2所示。其工作主频最高可以达到200MHz,含有8个可并行处理的运算单元,芯片处理速度高达1600MIPS。片内含有264KB×8位储存器,其中包括有4KB×8位L1D cache、4KB×8位L1P cache以及256KB×8位L2RAM/cache[5]。另外,它还采用了VLIW体系结构、流水线技术以及特殊指令集,因而运算速度得到了大幅度提高。
图2 TMS320C6713 DSP芯片
由于实验条件限制,无法将TMS320C6713与数码相机直接连接运行,并且它的储存容量十分有限,因此,只有借助于PC机以及其它设备来辅助测试相机的标定。从硬件原理框架图可知,本文将PC机与数码相机相连,目的是利用PC机来获取影像数据并自动识别人工标志;将PC机与显示器相连,目的是演示最后解算的结果;将TMS320 C6713 与PC机相连,目的是使TMS320C6713能够顺利获取相机标定所需要的数据,以便验证利用TMS320C6713来进行相机标定的可行性,硬件的设计方案达到实验要求。
2 基于DSP的相机标定系统的软件设计
2.1 相机标定系统工作流程
采用的图像采集设备是非量测数码相机,图像分辨力达到2150万像素,人工标志自动识别算法较复杂且需要开辟一定的储存空间,然而TMS320C6713的储存空间又十分有限,所以本文实验直接利用PC机来完成人工标志的自动识别。整个系统的工作流程如图3所示。首先,PC机通过USB接口数据线从数码相机获取影像数据,并对图像中的人工标志进行自动识别处理,获得编码标志的编号及点位信息;然后,TMS320C6713通过RS232标准串口从PC机中分配获取相机标定所需要的原始数据,并利用它们来进行相机标定解算,解算出像片的内外方位元素以及数码相机的畸变参数;最后,将解算的结果传回给PC机并通过显示器演示出来。
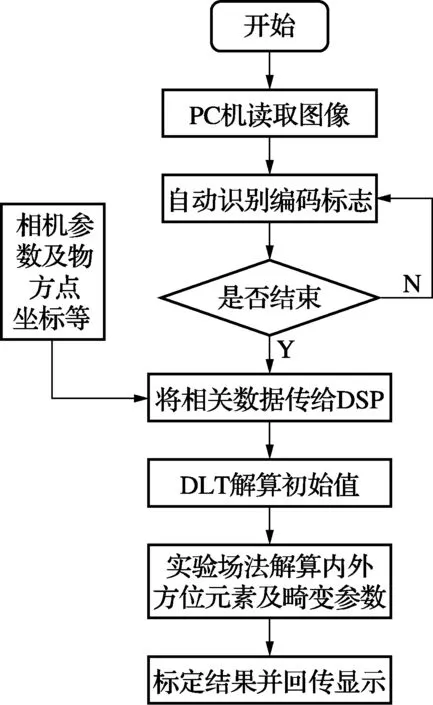
图3 相机标定系统流程图
文献[6-7]等对近景摄影测量系统中相机标定技术均进行了深入的研究,对标定算法的研究不是本文研究的重点,故此采用DLT算法和试验场法算法设计相机标定系统。
2.2 TMS320C6713与PC机之间的通信
关于DSP串口通信方式现有多种方式,例如通过软件模拟或外部可编程芯片实现数据收发等[8]。本文采用的是后一种方式,即利用异步串口通信收发器来辅助TMS320C6713完成数据收发。
2.2.1 TMS320C6713串口通信
本文将采用轮询方式实现串行通信,即CPU不断查询串口状态进行接收和发送,如LSR寄存器可以输入输出端口的变化,以此来告诉TMS320C6713是接收还是发送数据抑或是等待状态。当LSR等于0时,说明有数据发送过来,这时TMS320C6713对数据进行采样存储到寄存器中;当LSR等于1时,说明要发送数据出去,这时TMS320C6713将8位并行数据转换成串行数据发送给PC机。具体过程如图4。

图4 DSP串口传输过程图
2.2.2 PC机串口通信
本文实验在VC环境下,直接采用Microsoft公司提供的MSComm串口通信控件来实现数据的异步传输[9],编程步骤如下:
1)在当前的工程中插入MSComm控件,并添加相应的类和对象;
2)对串口进行初始化,设置其属性参数;
3)添加串口捕捉程序OnComm(),采用事件驱动的方法,即有事件(如串口接收到数据)时通知程序;
4)编辑串口读写函数和其他功能程序。
在数据传输过程中,采用的是D型串口线,只能以字节为单位进行传输,而要实现摄影测量定位解算,其数据(包括内方位元素、像点坐标及对应的物点坐标等等)往往是双浮点型的,因此,在数据传输前,先要进行数据格式的转换。
3 实验
3.1 实验条件
本文实验采用TI公司推出的TMS320C6713 浮点DSP芯片、PC机。相机标定所需的实验场为室内试验场,如图5所示,主要由质地坚硬的钢管与墙体组成,可以确保物方点具有较高的稳定性、可靠性;其上布有大量的人工标志点,可以自动提取标志点并自动附上编码,如图6所示,进而实现相机的自动标定。

图5 相机标定试验场
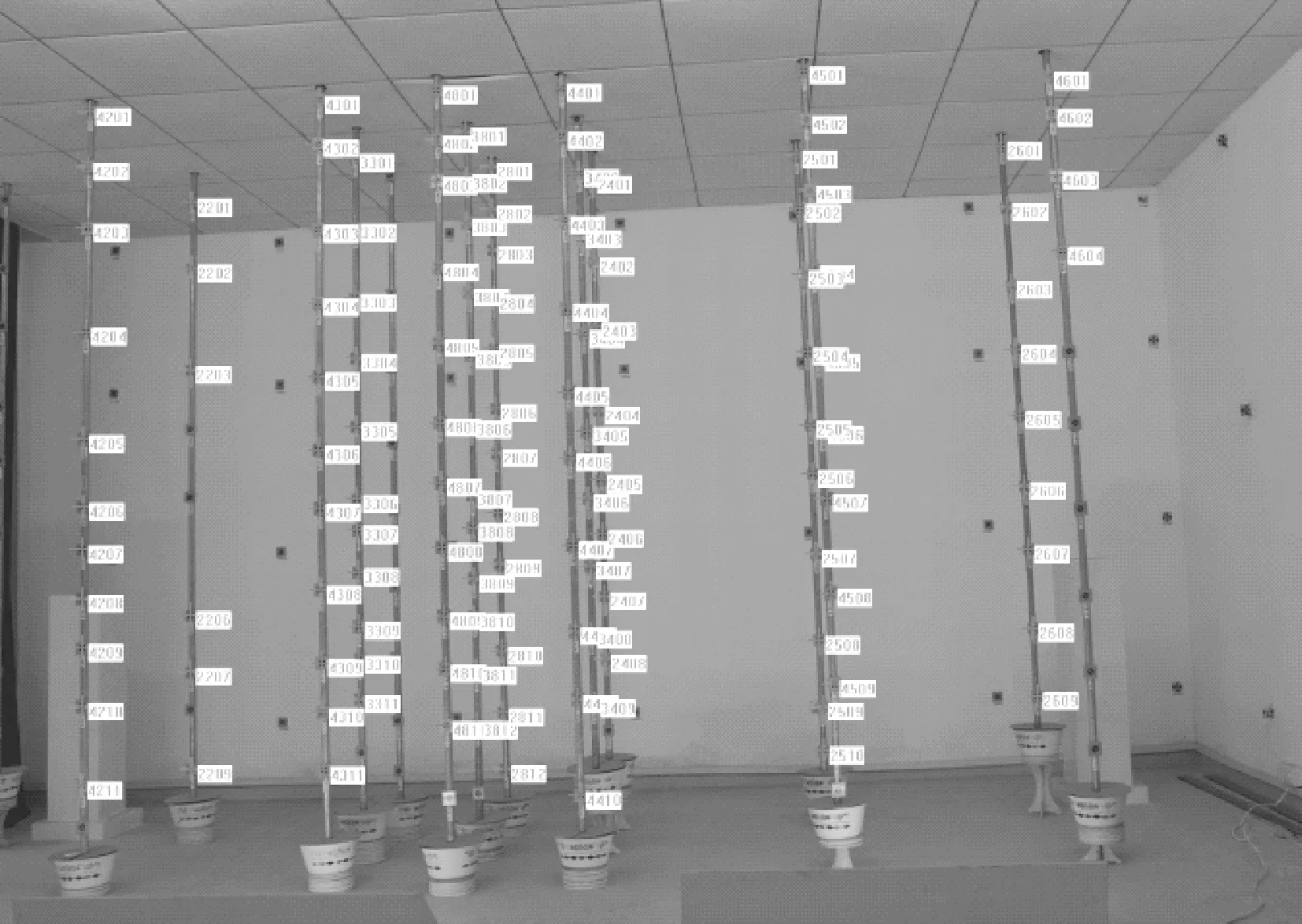
图6 编码标志识别结果
3.2 实验过程
首先,提取图像中的人工标志点,获得标志点的像素坐标并附上编码;由人工标志点的像素坐标计算其像平面坐标,其中,相机的像元大小为0.0055mm;结合已知的人工标志点的物点、像点坐标,利用DLT方法解算出像片的内外方位元素;然后以这些元素值为初始值代入试验场法所提供的方程中,解算出像片的外方位元素及相机的畸变参数;最后,验证该方法的精度,分析基于DSP的非量测相机标定的可行性。
3.3 实验结果
以得到的像点坐标和已知的对应物点坐标为源数据,利用DLT方法解出方程系数值,进而解得像片的内、外方位元素,结果如表1所示,其中(x0,y0)为像主点坐标,(XS,YS,ZS,φ,ω,κ)为像片的外方位元素。以解算得到的内、外方位元素为初始值,利用实验场法对相机进行标定,相机畸变参数结果如表2所示,其中k1,k2,k3为相机镜头径向畸变参数;P1,P2为相机偏心畸变参数;b1,b2为相机像平面畸变参数。相机标定所得到的像片内外方位元素及中误差与参考值之间的比较,结果如表3所示,其中参考值由目前最高精度的美国GSI公司商用化工业摄影测量软件V-STARS系统测量,文献[10]表明在摄影距离2m范围内V-STARS系统单相机测量的点位精度优于0.02mm,可以将其相机光束法自标定结果作为基准。利用解算出相应的像点坐标(x′,y′),与提取定位出来的像点坐标(x,y)相减可以得到坐标误差,根据如下误差计算公式计算X、Y、Z轴方向上的精度。

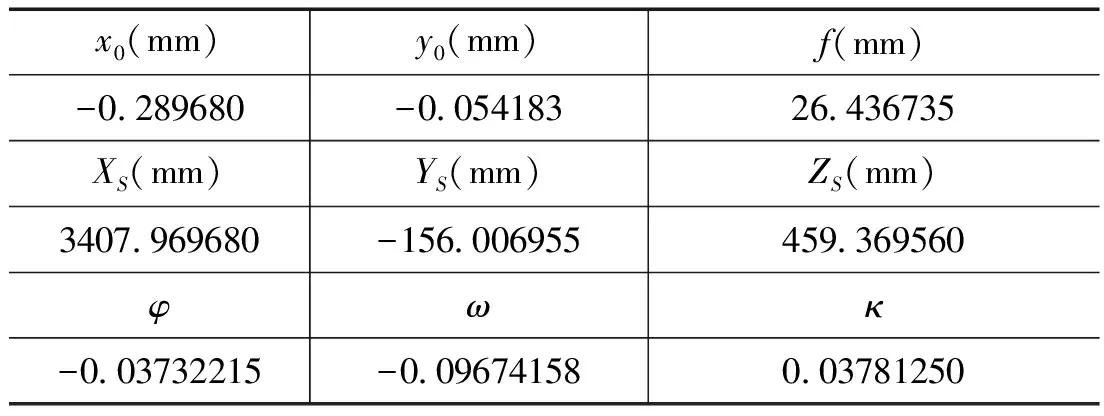
表1 像片内外方位元素 (角度单位:弧度)
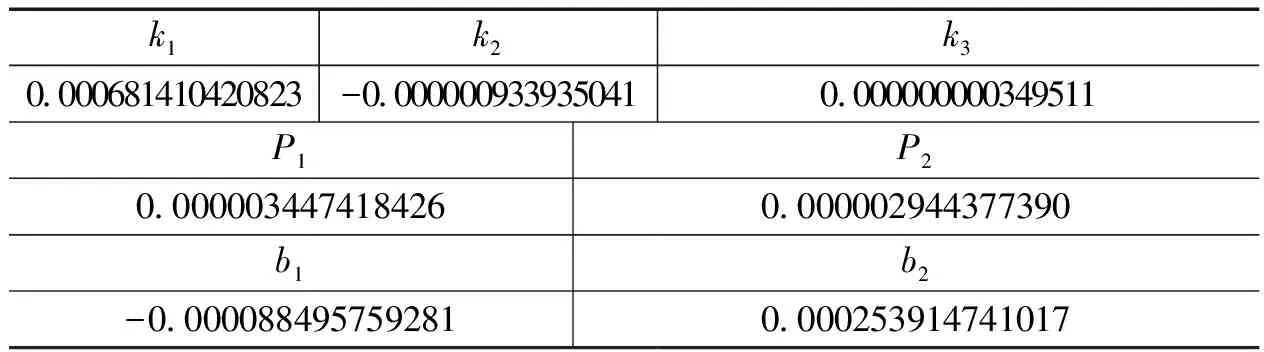
表2 相机畸变参数
4 结束语

表3 相机标定结果与参考值的比较 (角度单位:弧度)
1)由表3可知:10参数法在X方向上的精度比参考结果要好,而在Y方向上要差一些,但整体上,二者精度是一致的;由实验可知:虽然本文使用的DSP主频远不及通用CPU,但其具有乘累加器、可流水线操作等硬件优势,可大大提高运算的速度。
2)本文实验验证了用DSP进行近景摄影测量相机标定工作的精度是可靠的,与常规条件下解算的精度是相当的。由于实验设备有限,未能探测到整个程序运行的时间,但是,实际上其所花费的时间不足1s,是完全能够满足实时性要求的,因此,本文提出的基于DSP的相机标定方法是有效可行的。
[1] 周根林.嵌入式系统原理与应用[M].南京大学出版社,2006
[2] 吴东晖,田元.基于DSP的声发射信号采集及分析系统的研究[J].计量技术,2012(3):16-20
[3] Knittel,G.A.reconfigurable processing system for DSP applications [J].Circuits and Systems,1996,IEEE 39th Midwest symposium on,vol.2:864-867
[4] 张建新,段发阶.用于三维尺寸检测的双目视觉传感器[J].计量学报,1999,20(2):48-51
[5] 张雄伟,曹铁勇,陈亮,杨吉斌.DSP芯片的原理与开发应用[M].电子工业出版社,2010
[6] 范亚兵.大型高温锻件热态在位测量中三相机结构参数现场标定方法研究与实现[J].计量技术,2012(3):12-15
[7] 于英,黄桂平,等.双目动态摄影测量技术研究与实现[J].计量学报,2010,31,(3):204-207
[8] 杨剑,贾冲,杨吉斌.基于DSP同步串口的异步串行通信接口的设计与实现[J].集成电路应用,2006,(1):112-114
[9] Choi.Y.S.,Yim.Z.K.,Chung.J.H.Real-time implementation of image encoding for DVR systems using TMS320C6201[J].Circuits and Systems,2000.Proceedings of the 43rd IEEE Midwest Symposium on,vol.3:1104-1107
[10] 黄桂平,卢成静,钦桂勤.数字近景摄影测量大尺寸三维坐标测量系统V-STARS的测试与应用[J].宇航计测技术,2009,29(2):5-9
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
测控技术(2018年12期)2018-11-25 09:37:20
现代测绘(2018年3期)2018-09-13 09:34:46
传感器与微系统(2018年7期)2018-08-29 00:44:24
电脑与电信(2018年12期)2018-03-23 02:37:40
制造技术与机床(2017年9期)2017-11-27 02:13:55
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
电子制作(2017年23期)2017-02-02 07:16:47
星星·散文诗(2015年34期)2015-10-26 19:25:18
