
基于自由测站的基坑水平位移监测精度探讨
2013-04-14 02:01白云贵杨雪峰周凌焱达乾龙刘成龙
铁道勘察 2013年6期
白云贵 杨雪峰 周凌焱 达乾龙 刘成龙
(1.沈阳铁路建设监理有限公司,哈尔滨 110000; 2.西南交通大学,四川成都 610031)
为了安全以及保护城市环境,城市深基坑施工场地必须进行围挡施工,场地空间往往非常狭窄,围挡外常有既有的道路和建筑物,围挡内有施工车辆等移动设备及临时堆积材料,基坑周边环境往往非常复杂[1]。以往基坑水平位移监测方法一般是采用视准线法、极坐标法等[2-3],而这些方法是基于基坑附近有相对稳定的地面基准点为基础,并保证基准点与监测点通视的条件下才能进行监测。基于以上问题,参考文献[4]中提出了采用基于自由测站的基坑水平位移监测方法的探讨,该方法具有测站点无需对中、测站摆放灵活等优点,但是该文并没有谈及《JGJ82007 建筑变形测量规范》[5]中所要求的各监测点不同周期的观测精度应固定的问题。基于这个问题,首先介绍了水平位移监测精度仿真计算方法,然后基于该方法对模拟的不同周期测站位置改变后的三种监测网形进行了监测精度估算,最后得出基于自由测站的基坑水平位移监测法测站位置改变后对监测点精度的影响情况,据此可以判断该方法是否能够满足基坑监测的精度要求。
1 基坑水平位移监测法测量原理
基于自由测站的CPⅢ控制网(以下简称CPⅢ网)是高速铁路轨道精调中所用到的高精度轨道控制网。该方法是在铁路线路附近架设全站仪,采用自由测站边角交会法测量线路两侧多对CPⅢ点的方向和距离,并联测就近的CPI或CPⅡ(CPⅢ网的上级控制点),以获取CPⅢ控制网点坐标的一种控制网建网测量的新方法。
CPⅢ网是沿线路布设的三维控制网[6],一般在线下工程施工完成后进行施测,作为轨道施工和运营维护的基准。CPⅢ网按自由测站边角交会方法测量,点间距为纵向60 m左右、横向为线路结构物宽度,测量精度为相邻点位的相对点位中误差小于1 mm。其测量方法较传统边角网测量有很大差异,传统的边角网测量仪器都是架设在控制点上进行观测,距离必须进行往返观测,但CPⅢ网是采用自由测站进行边角交会测量,无需在控制点或观测点上架设仪器,并且其距离只能进行单程观测。图1为CPⅢ网测量网形示意。

图1 CPⅢ网测量网形示意
CPⅢ网具有网形对称,精度要求高的特点,为了适应基坑的水平位移监测,可以对交会网形进行改造,此时基坑变形监测网的网形可设计成如图2所示的监测网。

图2 基于自由测站的基坑监测网网形示意
图2中,为了观测基准点和基坑监测点,可在自由测站1和自由测站2的位置架设全站仪,采用全圆观测法多测回对基准点和基坑监测点进行观测,记录自由测站到各基准点及各监测点的水平距离和水平方向观测值。
2 监测点水平位移监测精度估算方法
为了估算监测点的精度,在AutoCAD 2013软件中设计了一个标准的基坑监测网,其观测值可直接从图上量测得到,可对自由测站至各基准点及各监测点的水平距离和水平方向观测值开列误差方程。误差方程的开列方法如下。
假定网中距离观测值为S,距离改正数为vS,监测点近似坐标为X0、Y0及改正量为δx、δy,则有如下的距离平差值方程式[7]

(1)
上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得距离误差方程式为

(2)
再假定网中水平方向观测值为L,其改正数vL,待定点近似坐标为X0、Y0及改正量为δx、δy,则有如下的水平方向平差值方程式[7]
(3)
上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得水平方向误差方程式为[6]

(4)

由于网中的距离和方向是两个独立不相关的观测量,要对不同类观测值统一在进行平差,需确定这两类观测值间的权比关系。在给两类观测值定权时,可按照经验定权法确定这两类观测值间的权比关系。
以水平方向观测值的中误差为单位权方差σ0,即σ0=σL,σL为全站仪方向测量的标称精度,则距离和水平方向观测值的权分别为
(5)
式中:σL为水平方向测量中误差,a、b分别为全站仪距离测量的固定误差和比例误差,Si为自由测站到目标点的距离。
根据距离误差方程(2)式和水平方向误差方程(4)式,可列出观测值误差方程的系数阵B;根据距离和水平方向观测值的权(5)式,可组成距离和水平方向观测值的权阵P。

(6)
这样,基坑监测点X和Y方向坐标中误差及其点位误差分别为
(7)
通过以上方法即可估算出两期监测点的坐标中误差,然后通过比较两期同名监测点的中误差,就可判断两期观测的精度差异。
3 基坑水平位移监测精度仿真计算
以模拟的某一长300 m、宽200 m的基坑为例,其监测点布点示意图如图3所示。JC1至JC6为监测点点号,各监测点顺时针依次布设在基坑边缘。为了模拟自由测站变化后的情况,设计了如图4所示的三种网形作为该基坑三个周期水平位移监测的观测网形,其中KZ1、KZ2为该基坑水平位移监测的基准点,布设于远离基坑、不受其变形影响的位置,ST1、ST2为自由测站点位。按上节所列公式对三种网形的监测点的精度进行估算,估算结果见表1所示。
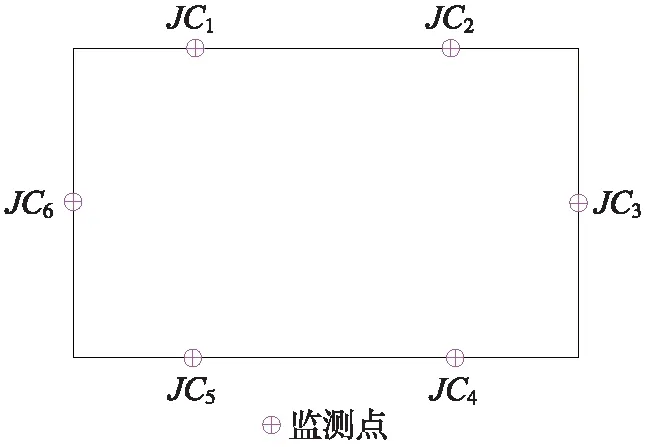
图3 某基坑监测点点位布设示意

图4 变动自由测站点位置后三期监测网形示意

监测点第一期监测点估算的坐标点位中误差第二期监测点估算的坐标点位中误差第三期监测点估算的坐标点位中误差较差最大值JC11.622.011.960.39JC21.842.011.590.43JC31.731.801.560.24JC41.601.591.580.03JC51.831.591.950.36JC61.721.792.050.33
由表1中三期监测点的点位中误差估算结果可以看出,每个监测点只被两个测站交会测量的情况下,三个周期监测的点位中误差最大值仅为2.05 mm,能够满足二级基坑水平位移监测的精度要求。如果增加测量的测回数和测站数的话,可进一步提高监测精度。
由表1中三期监测点的点位中误差较差情况可以发现,同一点不同期的点位中误差较差均没有超过0.5 mm,相差很小,其中较差最大值是0.43 mm。由此可得,基于自由测站的基坑水平位移监测法,改变自由测站的位置,其监测点监测精度受测站位置的变化影响较小,表明该方法监测精度稳定可靠,从而从精度上证明该方法是可行的。
4 结论
(1)基于自由测站的基坑水平位移监测法,全站仪无需对中,从而消除了仪器的对中误差。在测角精度为1″和测距精度为±(1+1×10-6D)mm观测条件下,该方法能够满足基坑水平位移的监测,达到二级基坑监测的精度要求。如果进一步增加测回数和测站数,该方法也能达到一级基坑水平位移监测的精度要求。
(2)该方法具有监测点监测精度受测站位置变化影响小的特点。因此,在实际监测中,测站选择约束条件小,可以灵活摆放,对于地形复杂、受施工干扰较大的基坑位移监测,不仅方便外业测量,而且能提高作业效率。
(3)基于自由测站的基坑水平位移监测法,测站所受约束条件小,不仅能够满足一般条件下的测量,而
且特别适用于基准点之间不通视,以及测站点只能观测到一个甚至无法观测基准点的情形,能够最大程度地实施在基坑监测后期、监测点被构筑物严重遮挡等情况下的水平位移监测。
(4)该监测方法对基准点与基准点之间,以及基准点与监测点之间的通视条件要求较低,因此基准点可以布设于距离监测点较远的位置,从而解决了基准点因基坑开挖影响周围土体变形而不稳定的问题。
[1]孙国峰.浅谈深基坑水平位移监测[J].科技创新导报,2008(2):49-50
[2]林泽耿.自由设站法监测基坑水平位移[J].广州建筑,2003(2):35-37
[3]金建平,赵仲荣.自由设站法在深基坑水平位移监测中的应用与分析[J].勘察科学技术,2008(5):55-58
[4]杨雪峰,刘成龙,罗雁文.基于自由测站的基坑水平位移监测方法探讨[J] .测绘科学,2011,36(5):153-154
[5]JGJ82007,建筑变形测量规范[S]
[6]刘成龙,杨友涛,徐小左.高速铁路CPⅢ交会网必要测量精度的仿真计算[J].西南交通大学学报,2008(6):718-723
[7]武汉大学测绘学院,测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2005(3):108-114
[8]杨雪峰,龚涛,汪精河.测量平差中求解协因数的简化算法[J].测绘科学,2009(1):85-86
[9]熊春宝,潘延玲,岳树信.基坑水平位移监测的方法比较与精度分析[J].城市勘测,1996(4):14-21
猜你喜欢
煤气与热力(2022年4期)2022-05-23
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
测绘地理信息(2022年2期)2022-04-02
水利水电科技进展(2021年6期)2022-01-07
陕西水利(2021年5期)2021-06-21
水电站设计(2020年4期)2020-07-16
全球定位系统(2020年1期)2020-03-31
江西建材(2018年4期)2018-04-10
山东工业技术(2017年24期)2017-12-29
