
基于神经网络的五相内置式永磁电动机的模型参考自适应控制
2013-04-09 06:54:32赵振民张洋
机械制造与自动化 2013年2期
赵振民,张洋
(黑龙江科技学院 研究生院,黑龙江 哈尔滨 150007)
0 引言
内置式永磁电动机因其高功率密度,高效率和低噪声等而被广泛应用。永磁加工工艺和技术的提高,永磁电动机的价格也在不断的下降。而电力电子器件的改进,无级变速控制技术的提高使永磁电动机越来越被关注。永磁电动机的输出转矩有两部分组成,1)由永磁铁产生的电磁转矩,2)由d,q 轴磁阻不等产生的磁阻转矩。当然,永磁电动机的大磁阻转矩和高强度转子也使它有一个非常大的弱磁控制区域,高强度的转子可以适应高转速的要求[1]。
对多相电动机研究了不少年[2-5],为了区分多相和三相电动机,可以用单相额定功率来确定,多相电动机与三相电动机相比,单独一相的功率负载要小的多,因此,对变频器的半导体器件的电流、电压的要求降低了。换句话说就是即便半导体器件的额定功率不变,多相电动机和变频器的总额定功率也可以大幅提高。当然多相电动机也其他的优点,由于其转矩波动的频率增加而幅度减小所以其电动机运行的噪声低,震动小。通过适当的设计,相数的增加意味着更好的容错能力,电动机的容错能力在有些对安全可靠要求高的应用中起到很大的作用[4]。更大的控制自由度可以更好地驱动电动机[2],下文会详细讨论,这里就不赘述了。
但多相电动机的复合转矩产生原理和高的转子磁饱和性将会影响内置式永磁电动机的性能。因此,对高性能的电动机驱动就被提上议题,特别是对变速控制或负载周期变化的应用场合中,本文正是基于此点要求设计的。
1 五相永磁内置电动机的数学模型
1.1 五相永磁同步内置电动机方程
本节中,五相永磁内置电动机的数学模型由多参考系坐标转换导出,多参考系坐标转换近似于三相电动机的帕克转换。
由自然坐标系到旋转坐标系的扩展帕克变换矩阵:

其中θ 是电动机转子空间角度。
定子参考坐标系下的五相参数需要转化为两个旋转坐标系:同步速度旋转的d-q 参考坐标系,以三倍同步速度旋转的d3-q3参考坐标系。这两个参考坐标系是正交的,信号的基波注入d-q 坐标系,而三次谐波注入d3-q3坐标系。
定子电压等式由多参考坐标系导出:

其中:vd,vq,vd3,vq3是相应的d,q,d3,q3轴的定子电压。id,iq,id3,iq3是相应的旋转坐标系中的定子电流。λm和λm3分别是转化的磁链的基波和三次谐波部分。ωe是电动机转子的转速。Ld,Lq,Ld3,Lq3是旋转坐标系下的电感。
电磁转矩方程由共能方法得到。也就是转子能量不大时,电磁转矩表示为[2]:

如果转子结构由于Ld和Lq不等而能量不能忽略,则电磁转矩方程变换为:

对于大多数内置永磁电动机的制作来说,如果没有任何的谐波的成分那么反电动势呈现不了完美的正弦波形。三次谐波成分在五相永磁内置电动机反电动势中一般都是起主要作用的。所以,对大多数五相永磁内置电动机λm3通常不为零,电磁转矩的性能可以由三次谐波电流的注入来提高。
1.2 最优三次谐波
最优的三次谐波由电磁转矩方程式(6)给出。为了分析的简化,电磁转矩方程中的磁阻可以忽略。稳态下,电磁转矩等于负载转矩,近似转矩就可以如下式得出:

通过转矩方程式(6),q 轴电流由转矩方程得出:

电动机驱动的设计准则之一是最小化RMS 相电流,如下:

将式(9)代入式(10)得到式(11):

唯一的变量是iq3,可以通过最小化式(11)得到:
把式(12)代回式(9),可以得到基波电流:
比较式(12)和式(13),显然:

目前,得出的最优三次谐波电流方程能够用最小的RMS 相电流产生同样的电磁转矩,这一点可以用在任何的永磁内置电动机驱动中,仅要求负载反电动势为零。而且,通过注入最优的三次谐波电流,电动机的转矩波动会最小化,电动机也会运行的更平稳,详细的分析请阅参考文献[7]。
1.3 五相内置永磁电动机的动态模型的推导
本节中,为了简化提出的电动机驱动系统分析,内置永磁电动机建模为一阶连续时间非线性动态系统。电动机的动态机械模型如下:

其中:J 是旋转部分的转动惯量;ω 是转子机械速度;B 是阻尼常数;TL是机械负载,Te是电磁转矩。如果反电动势中的三次谐波分量可以忽略,而且没有三次谐波电流的注入,那么动电动机转矩方程式(7)可以简化为:

近似于正常的三相内置永磁电动机的电磁转矩方程。为了利用内置永磁电动机的磁阻转矩,最大电流转矩控制需要d 轴的电流注入。最大电流转矩控制下的电流id计算如下[8]:

把式(16)和式(17)代入式(15),电动机模型由如下的一次动态方程表示:

其中:f(ω,iq)是速度ω 和q 轴的电流iq的非线性函数,表示为:

由于参数不易获取,详细的f(ω,iq)模型不可知,而且因为电动机的大速度范围和弱磁控制的需要id的式(17)可能会变成式(20)[9]。

此外,五相内置永磁电动机中的电磁转矩方程式(7)替代简单的方程式(16),也会增加函数f 的复杂性。下面的分析仅仅假设函数f 是由高非线性的ω 和iq函数构成的。
2 模型参考自适应控制设计
2.1 模型参考自适应控制方案
模型参考自适应控制的目的是设计一种控制律,这种控制律可以生成q 轴的参考电流,此外还有调整律,调整律是为了调整主控制器参数的,这样使系统输出ω 跟踪参考信号,系统的闭环动态性能跟踪线性参考模型[10]。只要控制器设计合适则由模型参考自适应控制的本身特性来保证系统的动态性能。
通过观察内置永磁电动机的模型式(18)可以看出电动机的机械动态特性由速度的一阶导数决定,因此,参考模型需要选择一个稳定的一阶线性模型,模型由如下的微分方程给出:

其中:a 和k 都是远大于零的常数,目标的闭环动态性能是由此来决定的。图1 所示的模型参考自适应控制结构会用于提出的电动机驱动模型。参考模型由式(21)所示。主控制器是一种新型的人工神经网络型控制器。电流控制器是带宽可调的滞后型控制器。图2 所示为提出的电动机驱动系统的完整方框图。速度的参考和测量信号间的误差为设计的模型参考自适应控制器的输入,输出做为q 轴的电流参考信号。是通过全电流发生器产生的,这个发生器也会控制转矩电流iq和磁阻电流id。如果需要对电动机驱动注入三次谐波电流,参考电流也可以用这个发生器产生。滞后电流控制的输出是五相开关信号,这些信号是驱动逆变器来直接控制内置永磁电动机。


2.2 人工神经网络主控制器的设计
图1 的主要人工神经网络控制器是以下面的公式为参考设计的:

其中:Nf做为非线性函数f 的替代函数,利用径向基函数神经网络来实现;w 是Nf的参数矢量,通过在线学习来最小化神经网络模拟器Nf和未知的非线性f 函数之间的误差。误差信号定义为:

把式(22)和式(21)代入式(18),以误差信号e(t)来表示:

经过对神经网络函数Nf的适当训练,误差趋向于零,如果a >0,式(24)在稳定平衡点原点周围是渐进稳定的。
用于模拟非线性函数f 的神经网络是高斯型径向基函数神经网络。
图3 说明了径向基函数神经网络的基本结构。其中采用了三层结构。第一层是输入层,输入额定值,中间层由几个模拟非线性特性的非线性传递函数组成。n 是神经网络中的隐藏神经元的数量。一般情况下,大多神经元都集中在中间层,网络训练越容易,计算量就越大。因为系统运行时神经网络是在线训练的,所以隐藏的神经元数量就非常关键了。本文是在训练和误差的基础上选择的数量值。网络的输出层为每个非线性传递函数分配不同的权值和计算总和。
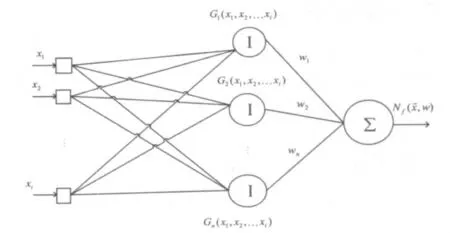
图3 高斯型径向基函数网络
本文选择高斯函数做为径向基函数神经网络的传递函数。高斯函数是很常用的基础函数,表示为:

其中:x 是函数中的输入向量,c 函数的是中心向量,δ 是函数的半径。输入向量由归一化的速度ω 和q 轴电流iq组成。
权值向量的调整律是基于速度误差和前一个权值向量。在连续时间域,权值调整律表达式为:

其中:Λ 和Ω 是所有对角矩阵大于零的对角线元素,e(t)是速度误差信号,Q(t)权值部分的输出向量。

详细的稳定性分析超出了本文的范围,但是可以在参考文献[11]中阅读。
3 仿真结果
本节给出了关键的仿真结果来验证提出的电动机驱动系统的有效性。仿真是在Matlab/Simulink 软件中做的。仿真中的内置永磁电动机的参数如下:
d 轴电感Ld=381 μH;
q 轴电感Lq=956 μH;
互感Lm13=0H;
定子相电阻rs=0.21 Ω;
旋转惯性矩J=0.015 kg·m2;
阻尼系数B=0.001 Nm·rad·s;
永磁磁链λm=0.043 Wb;
三次谐波永磁磁链λm3=0.005 05 Wb;
五相永磁电动机模型用的是转矩方程式(7)。测量的速度信号和q 轴电流在注入径向基函数神经网络前都归一化了。隐藏层的数值设为50.中心向量c 的范围是-2 和2 之间,半径是0.5。仿真时,模型参考自适应结构的参数a=1,k=1,因此,参考模型的传递函数为:
径向基函数神经网络的权值向量调整参数选择如下:


图4 根据提出的电动机驱动得出的五相电机模拟速度响应
图4 显示所提出的电动机驱动系统的模拟响应速度是在电动机满负荷情况下得出的。可以看出提出的速度控制器具有快速、准确的响应。参考速度在600 r/min 和900 r/min 间切换。电动机跟踪参考信号时间在5 s 之内,而且没有超调。说明闭环系统的性能和参考模型匹配较好。
图5 显示了只有基波的A 相和B 相的电流,图6 现实了有三次谐波注入时的电流图像。在同样的负载条件下,合适的三次谐波注入可以是电动机的驱动电流变小。


4 结论
本文提出了一种比较成功的基于模型参考自适应控制五相永磁电动机的新型神经网络的实现。模型参考自适应控制结构是用来保证电动机驱动系统在参数变化或负载改变的情况下的动态性能。主控器设计为一个基于神经网络的控制器,可以在线训练以适应参数的变化。理论分析,计算机模拟结果表明电动机的转速和速度参考信号跟踪密切。提出的基于神经网络的模型参考自适应控制可以在五相永磁电动机上实现,预计也可以通过简单的相数修正应用到所有矢量控制的交流电动机上。测量数据参考文献[11]。条件所限没有做实物验证,希望研究人员可以验证,指正我的不足。
[1]L.Parsa H.A.Toliyat,五相内置永磁电机驱动无传感器直接扭矩控制[J].IEEE 工业应用图像处理汇刊,2007,(4):952-959.
[2]L.Parsa H.A.Toliyat,五相永磁电机驱动[J].IEEE 工业应用图像处理汇刊,2005,(1):30-37.
[3]C.C.Chan et al.一种新型的高功率密度永磁变速电机[J].IEEE 能量变换图像处理汇刊,1993,(2):297-303.
[4]S.Dwari L.Parsa,开环错误的多相永磁电机的一种最优控制技术[J].IEEE 工业电子图像处理汇刊,2008,(5):1988-1995.
[5]L.Parsa K.Namhun H.A.Toliyat,高转矩密度的五相永磁电机驱动的弱磁场操作[C].2005 年电机和驱动国际会议,2005:1507-1512.
[6]M.Tursini F.Parasiliti D.Zhang,高性能永磁同步电机驱动PI 控制器的实时增益调整[J].IEEE 工业应用图像处理汇刊,2002,(4):1018-1026.
[7]L.Guo L.Parsa,使用最佳电流分析技术的内置式永磁电机转矩波纹抑制模块[C].IEEE 电机与驱动国际会议,2009.
[8]Y.A.-R.I.Mohamed T.K.Lee 内置式永磁同步电机驱动系统的自适应自整定MTPA 矢量控制器[J].IEEE 工业应用图像处理汇利,2006,(3):634-644.
[9]M.N.Uddin T.S.Radwan M.A.Rahman,内置式永磁电机驱动在超宽调度范围内的性能[J].IEEE 能量变换图像处理汇刊,2002,(1):79-84.
[10]H.D.Patino D.Liu,基于神经网络的模型参考自适应控制系统[J].IEEE 系统图像处理汇刊,2000,(1):198-204.
[11]赵品志,杨贵杰,李勇 三次谐波注入式五相永磁同步电机转矩密度优化[J].中国电机工程学报,2010,(33):71-77.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:39:10
防爆电机(2020年6期)2020-12-14 07:16:54
电子测试(2018年14期)2018-09-26 06:04:00
中国继续医学教育(2015年3期)2016-01-06 01:36:34
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
