
基于仿真雷达图像的低空风切变类型识别研究
2013-04-01 05:26蒋立辉张春庆熊兴隆庄子波
激光与红外 2013年3期
蒋立辉,张春庆,熊兴隆,庄子波
(1.民航气象研究所中国民航大学,天津300300;2.智能信号与图像处理天津市重点实验室中国民航大学,天津300300)
1 引言
风切变是一种严重影响飞机飞行的大气现象,具有持续时间短、尺度小、强度大等特点。国际航空界公认低空风切变是飞机起飞和着陆阶段的一个重要危险因素。自1975年以来,由于天气原因在美国发生的恶性空难事故中,有80%是低空风切变造成的。
目前对于低空风切变的识别这方面的课题研究还不是很成熟,如何有效地识别风切变日益成为保障民航安全运输的一个重要课题,国内外在此方面也取得了一定的进展。1982年美国JAWS(joint airportweather study)研究报告[1]中证明了多普勒雷达可探测微下击暴流。美国强风暴实验室研究出某些阈值以区别中气旋切变与其他切变;Steven D.Campbell等研制了WX1系统,利用人工智能的方法实现对风切变的自动识别[2]。国内方面,胡明宝等曾利用单多普勒雷达风场资料探测低空风切变[3]。
夏海云、孙东松等[4-5]从理论分析和试验两方面证明了激光雷达探测低空对流层风场的能力和准确性,并且通过试验,验证了多普勒激光雷达探测风场数据与风廓线雷达和有线探空测风仪实际探测数据的一致性。但是由于实验室条件有限,加之激光雷达实际探测风切变数据缺乏,难以获取。因此,对于风切变的探测以及识别只能依靠利用模拟仿真获得的基于激光雷达的单体切变风场数据,但这对更好地理解风切变风场的特性和有效地识别真实风场有着不可小觑的重要价值和意义。
近年来采用基于CFD(computational fluid dynamics)的数值模拟方法成为目前研究风切变风场结构的一种新思路。通过模拟仿真得到的几种简单三维低空变化风场,进而依据多普勒激光雷达的波束扫描方式,扫描仿真的三维变化风场,得到雷达扫描径向资料信息,并生成相应的风切变雷达图像。许多天气系统在多普勒径向风场信息中都有其独特的二维特征结构[6]。本文通过基于CFD数值模拟仿真生成的雷达扫描数据,生成仿真风切变雷达图像,并利用图像识别的方法针对不同风切变风场的不同结构的特点,进行风切变的探测、识别研究。
2 由仿真激光雷达数据生成仿真雷达图像
现有的仿真雷达数据是由matlab程序模拟激光雷达扫描模拟风场数据而生成的。格式为80×360的点阵数据,保存扫描获得的雷达所测的风场径向数据。其中径向距离为8 km,径向分辨率为100 m,扫描范围0°~360°,扫描仰角为5°。为了能够完整地还原雷达数据的方位和径向距离信息,需要将仿真雷达数据由直角坐标转换到极坐标下进行显示。
仿真雷达获得的数据信息是径向圆(极坐标)扫描方式,径向点坐标可表示为(r,θ),而计算机显示器显示的数据信息是以直角坐标(x,y)的方式扫描的,即从左到右的行扫和从上到下的帧扫,所以,要实现雷达数据的显示,关键是进行极坐标到直角坐标的转换,图1给出了转换的原理[7]。

图1 雷达极坐标与直角坐标转换Fig.1 the transformation between radar polar coordinates and cartesian coordinates
依照习惯,以雷达在设备坐标中的点作为雷达极坐标系的原点,如图1所示,以轴正方向为正北方,雷达天线按逆时针方向旋转。极坐标与直角坐标的转换关系[7]采用直接坐标变换算法,可以得到各种类型的低空风切变仿真雷达图像。
3 建立激光雷达探测低空风切变的数据样本库
为了有效地进行低空风切变类型的识别,我们需要在模拟低空风切变风场的不同位置扫描风场,生成位于不同区域的仿真雷达图像,从而建立充足的低空风切变样本库。通过选取多普勒激光雷达相对于变化风场的多个不同位置,我们建立激光雷达探测低空风切变的数据样本库。
图2为激光雷达探测低空风切变样本建立方式示意图。图中右侧的三维空间长方体为仿真的三维变化风场所在区域,风场区域尺寸为8000 m×8000 m×2000 m,坐标缩尺为1∶1000。图中的红点就代表激光雷达相对风场的位置,总共选取了117个不同位置。通过激光雷达相对风场的不同位置对三维风场进行探测,以此来建立激光雷达探测风切变的样本数据库。
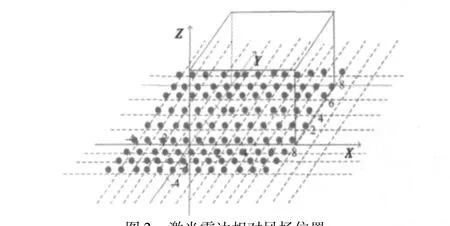
图2 激光雷达相对风场位置Fig.2 the relative postion between radar and wind field
本文将仿真的三维风场设置在坐标系的第四象限,其余三个象限都设定为均匀背景风场,其风速为2 m/s,风向与X轴正方向相同。把第一、二、三象限区域设为均匀风场,第四象限分别设为侧风切变风场、顺风切变风场、低空急流风场和微下击暴流风场,便可建立充裕的不同类型的低空风切变样本库。
激光雷达在位于坐标原点(0,0)处获得的四种类型的风切变仿真雷达图像分别如图3所示,其中图3(a)为侧风切变,图3(b)为顺风切变,图3(c)为低空急流,图3(d)为下击暴流,从图3我们可以看到,这四种类型的切变图像存在明显的不同。其他位置的仿真雷达图像,限于篇幅不再一一列出。

4 通过图像分割提取风切变区域
由于风切变的特征是风场中风速的剧烈改变,必然存在一个风速值大于周围的区域,这可以通过阈值分割提取该区域。本文的图像采取索引图像格式进行存储和显示,其中色图矩阵colormap采取matlab默认的jet色图,它是64×3的颜色映射矩阵,其中行数64表示它有64级的分辨率,每行的3个值表示颜色组成的RGB分量值。数据矩阵也采用64级分辨率进行存储,取值范围为0~63。风切变区域的分割采用阈值分割来进行提取,由于风速的极大值映射为图像的红色部分区域,因此取分割阈值为40对图像进行分割,可以得到分割后的上文所述的各种类型的风切变图像如图4所示。

由于切割后的风切变区域大小不一,需要对其进行归一化,本文将其归一化为30×30的索引图像。
5 小波分解提取纹理特征
不同类型的风切变图像其纹理信息存在明显的不同,可以通过提取分割后的风切变图像的纹理特征,作为相似性度量。
小波变换是时间和频率的局域变换,它具有多分辨率分析的特点,而且在时域频域都具有表征信号局部特征的能力。由于小波变换能将原始图像的能量集中到少部分小波系数上,且分解后的小波系数在3个方向的细节分量有高度的局部相关性,这为特征提取提供了有利的条件[8-9],因此本文提出采用小波变换提取图像的纹理特征,实验结果表明了该方法能够取得较好的识别分类结果。
对图像进行小波分解的示意图如图5所示。其中,L表示低频,H表示高频,图像在每个尺度上被分解成四个子带,其中LL为低频子带,是原图像的平滑逼近;LH是沿水平方向的高频子带,反映图像的水平边缘情况;HL是沿垂直方向的高频子带,反映图像的垂直边缘情况;HH是沿对角方向的高频子带,反映图像的斜边缘情况。
一般来说,随着小波分解层次的增加,提取的纹理特征也越来越准确,但分解层次越多,计算量也越大。在本文中,限于图像的分辨率精度,对图像进行两层小波分解即可满足要求。
在图像处理中,小波的对称性用在图像处理中避免相移,消失矩阶数大的小波变换使能量更集中,这样有利于选取主要成分作为特征。本文选择sym4小波基。sym小波基的构造类似于db小波基,但它比db小波基有更好的对称性,更适合于图像处理。

图5 图像的小波分解示意图Fig.5 schematic diagram ofwavelet decomposition
基于小波变换的纹理特征提取算法如下:
(1)对归一化后的风切变分割图像进行两层小波分解。
(2)求分解后每个子带小波系数的均值和标准差。设小波分解后的子带为…,7,则:

(3)得到特征向量T:将各个子带小波系数的均值和标准差作为图像的纹理特征向量中的各个分量,则特征向量 T=[u1,σ1,u2,σ2,…,u13,σ13]。
(4)特征归一化:由于上述7个特征相量的物理意义和取值范围不同,所以需要进行归一化。高斯归一化是一种较好的归一化方法,其特点是少量超大或超小的元素值对整个归一化后的元素值分布影响不大。设原始特征向量为[f1,f2,f3,fN],计算出其均值m和标准差σ,设归一化后的特征向量为[F1,F2,F3,FN],则:

利用式(11)对特征向量进行归一化,可将各个分量归一化到[-1,1]。
位于坐标原点(0,0)处的四种类型风切变的雷达扫描图像的二层小波分解图像分别如图6(a)~图6(d)所示。
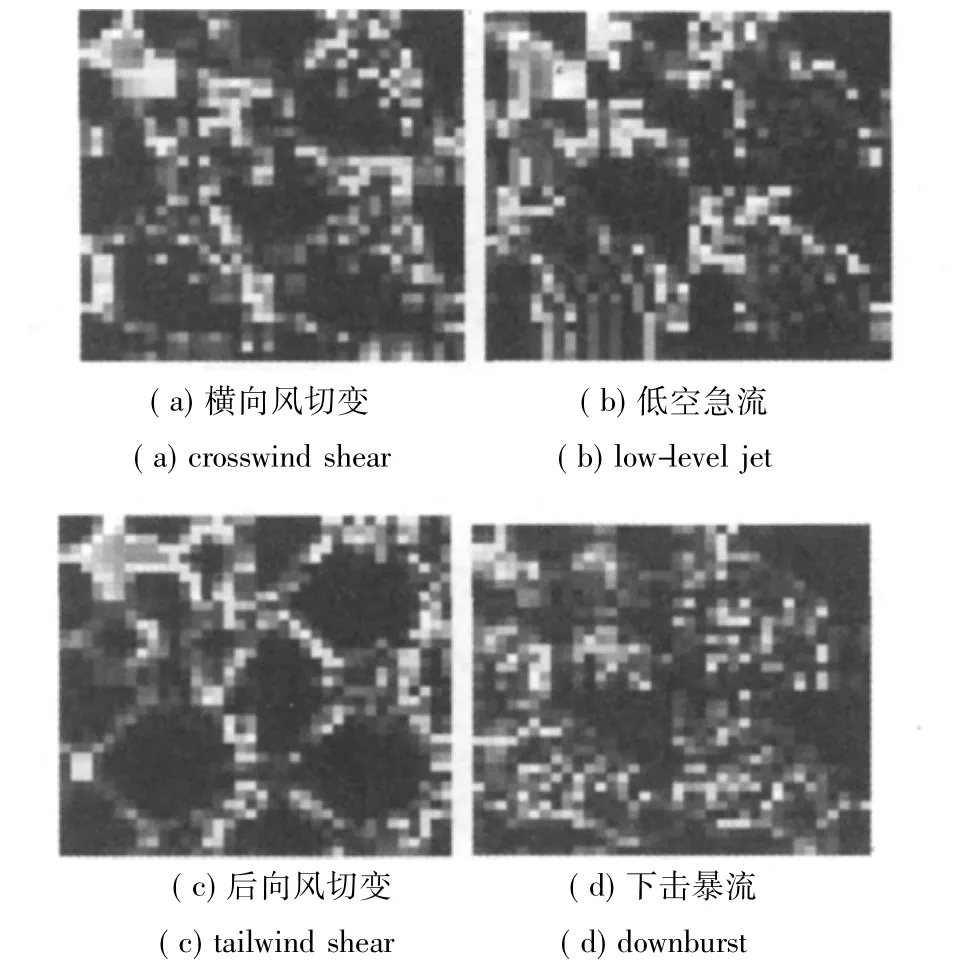
图6 不同风切变的小波分解图像Fig.6 wavelet decomposition Images of differentwind-shears
6 基于BP神经网络识别图像
人工神经网络(Artificial Neural Network)由于其具有大规模并行信息处理,良好的自适应与自学习等许多特点,近年来被广泛应用于包括模式识别在内的很多领域。基于神经网络的模式识别法相对于其他方法来说,其优势在于:①它要求对问题的了解较少;②它可以实现特征空间较复杂的划分;③它宜用高速并行处理系统实现[10]。
在众多神经网络结构中,目前应用最广的为BP神经网络。80%~90%的人工神经网络模型都是采用BP网络或它的变化形式。BP神经网络是一种典型的前馈神经网络[11],其网络的基本结构如图7所示,BP算法属于有监督式的学习算法,其主要思想是:输入学习样本,使用反向传播算法对网络的权值和偏差进行反复的调整训练,使输出的向量与期望向量尽可能地接近,当网络输出层的误差平方和小于指定的误差时训练完成,保存网络的权值和偏差。

图7 BP网络结构图Fig.7 structure image of BP network
BP神经网络分类实质上属于监督分类的范畴,网络的性能与训练样本规模和质量密切相关。本文选取上述的侧风,低空急流,顺风和下击暴流四种类型风切变的仿真雷达图像各87幅,作为训练输入样本库。其余的四种类别的图像各30幅作为测试样本库。在分别对仿真雷达图像进行图像阈值分割和小波分解提取特征向量后,可以获得348个7维的特征向量。将获得的348组特征向量作为输入向量,输入BP神经网络对其进行训练。创建的三层神经网络其输入节点根据提取的特征向量的维数确定为7个神经元,输出层节点为4个神经元,分别用输出[1 0 0 0],[0 1 0 0],[0 0 1 0]和[0 0 0 1]代表四种风切变类型。隐层和输出层神经元的传递函数f(x)均取logsig函数logsig(x)因为它的输出范围是0~1,正好适合在学习后输出值。学习函数是梯度下降动量学习函数learngdm,学习速率初始值选在0.01~0.6之间。性能函数选取平方和误差 mse,训练误差为0.01,学习最大次数为5000次。

表1 BP神经网络不同隐含层节点数目的识别结果Tab.1 the recognition results of different hidden layer nodes numbers
7 结语
本文针对威胁民航飞机飞行的低空风切变的识别工作进行了研究。通过利用激光雷达扫描已有的基于CFD软件模拟仿真出的不同类型的三维低空变化风场,获得仿真雷达扫描数据,并生成相应的风切变雷达图像,建立由不同扫描位置生成的仿真雷达图像样本库。在风切变类型识别算法方面,首先通过阈值分割,获得风切变区域,然后通过二层小波分解提取图像纹理特征,并生成特征向量。最后通过BP神经网络对其进行分类识别。实验结果表明,本算法的识别效果比较理想。如何进一步提高识别率,是下一步研究工作要解决的问题。
[1] Wilson JW,Roberts R D,Kessinger C,et al.Microburst wind structure and evaluation of doppler radar for airport wind shear detection[J].J Appl Meteor,1984,23:898-915.
[2] Campbell SD,Olson S H.Recognizing low-altitude wind shear hazards from doppler weather radar:An artificial intelligence approach[J].JAtmos Oceanic Technol,1987,4:5-18.
[3] Hu Mingbao,Tan Shuqing,Tang Dazhang,et al.A study on themethod for detecting low-level wind shear over airport with single doppler radar[J].Journal of Nanjing Institute of Meteorology,2000,23(1):113 -118.(in Chinese)胡明宝,谈曙青,汤达章,等.单部多卜勒雷达探测低空风切变方法[J].南京气象学院学报,2000,23(1):113-118.
[4] Zhong Zhiqing,Sun Dongsong,Wang Bangxin,et al.Dopplerwind lidar based on Fabry-Perotetalon[J].Infrared and Laser Engineering,2006,35(6):687 - 690.(in Chinese)钟志庆,孙东松,王邦新,等.基于Fabry-Perot标准具的多普勒测风激光雷达[J].红外与激光工程,2006,35(6):687-690.
[5] Xia Haiyun,Sun Dongsong et al.Fabry-Perot interferometer based mie Doppler lidar for low tropospheric wind observation[J].Appl.Opt.,2007,46(29):7120 -7131.
[6] Tao Zuyu,Zeng Lixin.Simulated Doppler image of mesoscale system[J].Journal of Applied Meteorology,1993,4(1):8 -15.(in Chinese)陶祖钰,曾立新.中尺度系统的模拟Doppler图像[J].应用气象学报,1993,4(1):8 -15.
[7] Jin Hongbin,Xu Yu,Dong Feng.Research on coordinate transformation under radar information processing systems[J].Journal of Air Force Radar Academy,2003,17(3):54 -58.(in Chinese)金宏斌,徐毓,董峰.雷达信息处理中的坐标变换问题研究[J].空军雷达学院学报,2003,17(3):54 -58.
[8] Wang Gaimei,Liu Ruiguang,Liu Fang.Texture image retrieval based-on wavelet package transformation[J].Computer Engineering and Applications,2004,(18):43- 44.(in Chinese)王改梅,刘瑞光,刘芳.基于小波包变换的纹理图像检索[J].计算机工程与应用,2004,(18):43 - 44.
[9] Li Haibin,Zhang Qiang.Research of sub-line segment matching based on dyadic wavelet transformation[J].Chinese Journal of Sensors and Actuators,2007,20(5):11 62 -1166.(in Chinese)李海滨,张强.基于二进小波变换的子线段匹配方法研究[J].传感技术学报,2007,20(5):1162 -1166.
[10] Jia Yonghong.Digital image processing[M].Wuhan:Wuhan University Press,2003:178 -179.(in Chinese)贾永红.数字图像处理[M].武汉:武汉大学出版社,2003:178-179.
[11] He Qingbi,Zhou Jianli.The convergence and improvements of BP neural network[J].Journal of Chongqing Jiaotong University,2005,2:143 -145.(in Chinese)贺清碧,周建丽.BP神经网络收敛性问题的改进措施[J].重庆交通学院学报,2005,2:143 -145.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
空间电子技术(2021年4期)2021-11-10
电子制作(2019年22期)2020-01-14
北京航空航天大学学报(2017年9期)2017-12-18
能源(2017年8期)2017-10-18
南方文学(2016年3期)2016-06-12
系统工程与电子技术(2016年2期)2016-04-16
通信电源技术(2016年1期)2016-04-16
中国房地产业(2016年8期)2016-03-01
兵器知识(2016年2期)2016-01-29
