
一种提高相位测距精度的方法
2013-04-01 05:26王元庆
激光与红外 2013年3期
曾 真,王元庆
(南京大学电子科学与工程学院,江苏南京210093)
1 引言
现有测相方法主要可以分为自动数字测相法、数字同步解调法、频域数字测相法。而频域数字测相方法与其他测相方法相比有以下的优点:首先,频域数字测相方法的测距精度很高,同等条件下频域数字测相的测相误差为数字同步解调方法的二分之一;且由DSP对数字序列做N点FFT变换,速度快,电路实现简单[1];其次,由于设计为相位敏感系统,当信号的幅度有所变化时,若使用DSP做信号处理,测相器有固定的相位分辨率,可以克服由于模拟信号的幅度变化引起的测相误差;再次,频域数字测相方法的测相速度快,计算量比较小,特别是在位数较多的时候,这一优点更加明显,在实际应用中更能体现出实时的特性[2]。现普遍使用的频域数字测相方法为FFT谱分析法[2-3],由于FFT和谱分析只能在有限区间内进行,这就不可避免地存在由于时域截断产生的能量泄漏,而谱线的离散化也不可避免地产生栅栏效应,使谱峰值变小,相位精度降低。为了提高相位测距的精度,本文选用了密集频谱细化及校正的方法,并使用了传统方法与本文方法对仿真的激光回波信号进行对比研究。
2 相位式激光雷达测距原理
激光相位测距的基本原理是通过发射强度调制的激光照射目标,使用高敏感度的光电器件,如APD,采集反射回来的信号。通过计算发射信号与回波信号之间的相位差Δφ,即可以得到目标的距离值 d,计算公式如下[4]:

其中,c为光速;f0为激光的调制频率;N为发射信号与回波信号相差的整数个波数。从式(1)可以看出,发射信号与回波信号之间的相位差Δφ的精度决定了测距的精度[5]。
加Hanning窗时,只进行单谐波频率成分的幅值恢复时的最大误差仍高达15.3%,相位误差更高达90°。而对于一个频率为20 kHz的理想正弦信号,使用200 kHz的采样频率采256个点,此时频率分辨率为频率分辨率即 781.25 Hz,频率结果误差高达4%,相位的测量精度不高[7]。其中,相位的测量精度又是由谱线查找和相位计算精度决定,因而本文使用复调制细化选带频谱分析方法提高谱线查找精度,相位差校正法提高相位计算精度。
3 相位精确估计方法的选用
3.1 复调制细化选带频谱分析算法
复调制细化选带频谱分析方法使用复解析带通滤波器,复调制移频点数为传统方法的1/D,较传统复调制细化选带频谱分析方法计算量小。它不但降低了FFT的点数[8],计算量小,且所需的内存空间也少得多,而且也不需要进行复杂的频率调整[9-12]。由于激光相位测距中数据量大,实时处理要求高,因而采用一级FIR复解析带通滤波器,能保证分析的精度误差在1%以内。具体的作法如下:先确定中心频率及细化倍数,在频率(f1-f2)范围内进行频率细化分析,则再构造一个宽度为1/D的复解析带通滤波器,对样本信号作选抽滤波。选抽后的信号进行复调制移频,将细化的起始频率移到零频点,最后做N点FFT和谱分析,不需要进行频率调整就可以得到具有N条独立谱线的细化频谱。其数据处理的流程如图1所示。最后得到的细化频谱谱线间隔为普通FFT的1/D,即在幅度谱上找到相应发射频率的频谱精度提高D倍[8]。复调制细化选带频谱分析方法可以细化谱线间隔,从而提高谱线查找的精度。

图1 复调制谱细化算法的数据处理流程图Fig.1 data processing flow chart ofmultiple modulation zoom spectrum analysis algorithm
3.2 相位差校正法
在常用的四种校正方法中,比值校正法和能量重心校正法是一种近似的校正方法,FFT+FT连续细化傅里叶变换法计算量大,而相位差法得到的是真实解且相位的校正不依赖于窗谱函数,因而采用相位差校正法。
先对原始单频率成分信号采(L+N)点样本,然后对这1到N和L到(L+N)两段信号分别进行作傅里叶变换,利用其对应离散谱线谱峰处的相位差进行校正。第一段的峰值谱线号i(i=0,1,2,…,N-1),设频率校正量为Δf=difs/N,其中di为归一化的谱线号修正量[9],其值范围为[- 0.5,0.5]。第二段进FFT(或DFT)后与之对应的峰值谱线号为i,T=N/fs,有相位差[7]:

设信号FFT的实部为Ri,虚部为Ii,由对称窗函数相位特点,归一化频率校正量为di时,则校正后的相位为:

4 激光相位测距的仿真计算与比较
设定发射信号频率f0=3 MHz,采样频率为fs=32 MHz,f1为信号归一化频率。加Hanning窗,进行整型FFT变换,进行选抽滤波之后做N=4096的FFT变换。利用计算机生成仿真的激光发射和回波信号:

对于激光相位式测距,距离信息是由发射信号与接收信号的相位差计算得到的,因而对于测距有意义的是两信号间的相位差值。使用密集频谱细化及相位差校正法和传统方法得到两相位差值的分析结果(其中细化倍数为150倍,中心频率为3 MHz,采用一级FIR滤波器,滤波半阶数为500)。本文方法与传统方法的仿真计算角度值如图1所示,误差结果如图2所示,测距结果如表1表示。

图2 本文方法与传统方法分析结果Fig.2 results of the proposed method and the traditional one
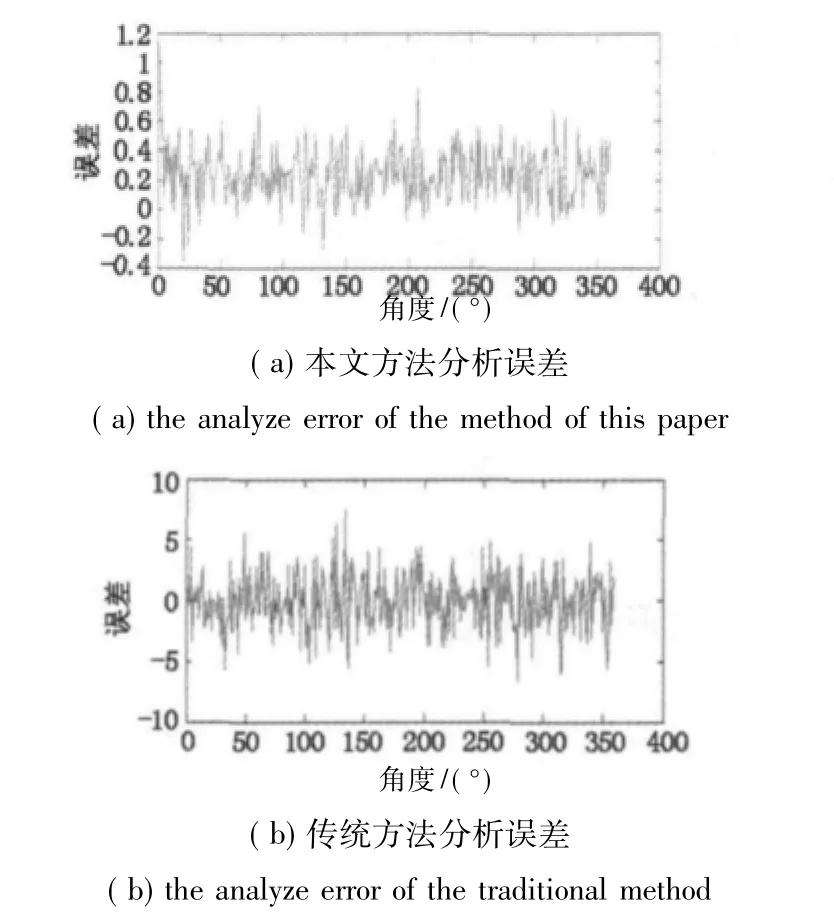
图3 本文方法与传统方法分析误差Fig.3 errors of the proposed method and the traditional one

表1 测距结果对比表Tab.1 comparing table of the ranging result
从以上数据可以看出,相位误差高达10°,即对于3 MHz的发射频率,测距精度为3 m,只能通过增加FFT的点数来提高精度。本文采用先进行频谱细化,再进行频谱校正的方法,误差最大仅为1°即对于3 MHz的发射频率,测距精度为0.3 m。克服了频域数字测相法分辨率不高的缺陷。
4 结论
在传统的相位测距方法中,只能通过增加FFT的点数来增加相位计算的精度,使得运算量增加、速度降低。相比较而言,频谱细化算法中基于复解析带通滤波器的复调制谱细化算法所需的运算量少,计算速度最快;频谱校正算法中相位差校正算法校正是一种精确地校正方式,校正精度很高;频谱细化和频谱校正技术能大大提高频谱分辨率。在工程应用中,本文方法运用于激光相位测距中能大幅度提高频域数字测相的精度。
[1] Zhang Ting,et al.Study of phase-shift laser measuring based on matlab[J].Laser & Infrared,2010,40(1):22 -27.(in Chinese)张婷,等.基于Matlab的相位式激光测距研究[J].激光与红外,2010,40(1):22 -27.
[2] Hui Zhang.The realization of laser distance-measuring equipment on embedded system[D].Shanghai:Tongji U-niversity,2007.(in Chinese)张慧.相位法激光测距算法的嵌入式系统实现[D].上海:同济大学,2007.
[3] Xie Lei,Li Ji.Realization of digital phase detector based on FFT algorithm in laser distance measurement system[J].Chinese Journal of Quantum Electronics,2003,20(1):85 -88.(in Chinese)谢蕾,李季.基于FFT的激光测距数字相位计的实现[J].量子电子学报,2003,20(1):85 -88.
[4] Wang Tao.Research of the phase laser ranging techonology[J].Laser & Infrared,2007,37(1):29 - 31.(in Chinese)汪涛.相位激光测距技术的研究[J].激光与红外,2007,37(1):29 -31.
[5] Gao Song.The research on some key questions about digital phase laser range measurement system[D].Dalian:Dalian Maritime University,2007.(in Chinese)高篙.数字鉴相式激光测距系统几个关键问题的研究[D].大连:大连海事大学,2007.
[6] Jin Yanhua.Study of a novel zoom spectrum analysis,international conference on communications and mobile computing[J].Communications and Mobile Computing,2009,(1):367-371.
[7] Ding Kang,et al.Synthesized correctingmethod of phase difference on discrete spectrum[J].Journal of Vibration Engineering,2002,15(1):114 -119.(in Chinese)丁康,等.离散频谱综合相位差校正法[J].振动工程学报,2002,15(1):114 -119.
[8] Jing Gai.Frequency estimation of uncooperative coherent pulse radars [J].Military Communications Conference,2007:1-7.
[9] QiGuoqing.Analysis of the influence of observation starting time on FFT-based phase estimation of sinusoid[J].Signal Processing(ICSP),2010:26 -29.
[10] Jiang Bo,etal.Research and realization ofmultiplemodulation ZoomFFT algorithm in partial Zoom spectrum analysis[J].,2010,(7):48 -49.(in Chinese)江波,等.基于复调制的ZoomFFT算法在局部频谱细化中的研究与实现[J].大众科技,2010,(7):48 -49.
[11] Ding Kang,Xie Ming,et al.Principle and method ofmultiplemodulation zoom spectrum analysis based onmultiple analytical band-pass filter[J].Journal of Vibration Engineering,2001,14(1):30 -35.(in Chinese)丁康,谢明,等.基于复解析带通滤波器的复调制细化谱分析原理和方法[J].振动工程学报,2001,14(1):30-35.
[12] Shang Haitao,Xue Hongxi.Study on the ZoomFFT algorithm based on band-pass filter[J].Process Automation Instrumentation,2011,32(4):10 -12.(in Chinese)尚海涛,薛红喜.基于带通滤波器的ZoomFFT算法研究[J].自动化仪表,2011,32(4):10 -12.
猜你喜欢
测试技术学报(2021年3期)2021-06-11
科学(2020年3期)2020-01-06
劳动保护(2018年5期)2018-06-05
华人时刊(2018年23期)2018-03-21
中华建设(2017年3期)2017-06-08
电子制作(2017年7期)2017-06-05
光学精密工程(2016年1期)2016-11-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
装备环境工程(2015年4期)2015-02-28
机械工程师(2014年6期)2014-12-23
